一种具有多次认证功能的叉车监控管理装置的制作方法
1.本实用新型涉及叉车监控管理技术领域,具体为一种具有多次认证功能的叉车监控管理装置。
背景技术:
2.近年来,物流行业高速发展,叉车作为物流行业内常使用的搬运车辆,是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆,叉车广泛应用于港口、车站、机场、货场、工厂车间、仓库、流通中心和配送中心等,在船舱、车厢和集装箱内进行托盘货物的装卸、搬运作业,是托盘运输、集装箱运输中必不可少的设备。
3.现有的叉车监控管理装置使用时存在一定的弊端,首先,现有的叉车大部分仍在使用人工驾驶,人工成本高,效率低,其次,综合管理的误差多,具体某些细节容易出现偏差,系统有待进一步提高,给人们的使用过程带来了一定的不利影响,为此,我们提出一种具有多次认证功能的叉车监控管理装置。
技术实现要素:
4.解决的技术问题
5.针对现有技术的不足,本实用新型提供了一种具有多次认证功能的叉车监控管理装置,具备高智能,能实时应对突然发生的事件,作出相应的调整,叉车采用无人驾驶,可全天24小时无间歇工作,效率高,人工成本低,工作程序行如流水,运行安全稳定等优点,可以有效解决背景技术中的问题。
6.技术方案
7.为实现上述目的,本实用新型采取的技术方案为:一种具有多次认证功能的叉车监控管理装置,包括统筹全局操控系统、服务器、视频监控系统,叉车数据传输模、无线局域网模块、无人叉车控制模块,所述服务器包括运行路线模拟系统、虚拟建模场景,所述虚拟建模场景包括虚拟叉车模型、虚拟人员模型、虚拟货物模型、虚拟仓库场景模型,所述服务器将数据处理优化工作路线,所述无人叉车控制模块包括身份认证模块、人工智能操控系统、防碰撞安全仪、超载检测仪、车臂检测仪、车速检测仪、能源检测仪,所述人工智能操控系统、防碰撞安全仪、超载检测仪、车臂检测仪、车速检测仪、能源检测仪的数据通过叉车数据传输模传导到服务器。
8.优选的,所述视频监控系统将监控到的仓库场景、货物堆积情况、人员流动路线、无人叉车控制模块活动轨迹数据传导到服务器。
9.优选的,所述身份认证模块辅助无人叉车控制模块在服务器的虚拟建模场景中定位、接收无线局域网模块传达的指令。
10.优选的,所述服务器接收到视频监控系统、叉车数据传输模的传输数据,生成虚拟建模场景。
11.优选的,所述虚拟建模场景中的虚拟叉车模型、虚拟人员模型、虚拟货物模型、虚
拟仓库场景模型经过运行路线模拟系统的运算,得出最优的无人叉车控制模块工作路线。
12.优选的,所述统筹全局操控系统根据运行路线模拟系统得出的数据作出调整指令,指令通过无线局域网模块传达给无人叉车控制模块。
13.有益效果
14.与现有技术相比,本实用新型提供了一种具有多次认证功能的叉车监控管理装置,具备以下有益效果:
15.1、该具有多次认证功能的叉车监控管理装置,通过设置的服务器,虚拟建模场景能实时模拟出工作场地的环境,运行路线模拟系统可根据虚拟建模场景对无人叉车控制模块的工作程序作出相应对的调整,制作出最优的工作路线,有效的减少多余的、不必要的冗杂动作,极大的提升工作效率,保障设备安全稳定运行。
16.2、该具有多次认证功能的叉车监控管理装置,通过设置的无人叉车控制模块,可无间歇24小时工作,其中设置的身份认证模块可保障每一部不同编号的无人叉车控制模块接收到各自的程序指令,分工合作执行工作命令,人工智能操控系统可保障无人叉车控制模块忠实地执行统筹全局操控系统颁发出来的指令,防碰撞安全仪、超载检测仪、车臂检测仪、车速检测仪、能源检测仪等装置可保障无人叉车控制模块安全稳定地工作。
附图说明
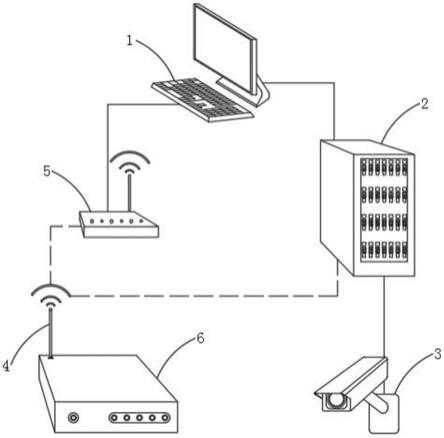
17.图1为本实用新型一种具有多次认证功能的叉车监控管理装置的整体结构示意图。
18.图2为本实用新型一种具有多次认证功能的叉车监控管理装置的整体程序结构示意图。
19.图3为本实用新型一种具有多次认证功能的叉车监控管理装置的服务器程序结构示意图。
20.图4为本实用新型一种具有多次认证功能的叉车监控管理装置的无人叉车控制模块程序结构示意图。
21.图中:1、统筹全局操控系统;2、服务器;201、运行路线模拟系统;202、虚拟建模场景;203、虚拟叉车模型;204、虚拟人员模型;205、虚拟货物模型;206、虚拟仓库场景模型;3、视频监控系统;4、叉车数据传输模;5、无线局域网模块;6、无人叉车控制模块;601、身份认证模块;602、人工智能操控系统;603、防碰撞安全仪;604、超载检测仪;605、车臂检测仪;606、车速检测仪;607、能源检测仪。
具体实施方式
22.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
23.如图1-4所示,一种具有多次认证功能的叉车监控管理装置,包括统筹全局操控系统1、服务器2、视频监控系统3,叉车数据传输模4、无线局域网模块5、无人叉车控制模块6,服务器2包括运行路线模拟系统201、虚拟建模场景202,虚拟建模场景202包括虚拟叉车模型203、虚拟人员模型204、虚拟货物模型205、虚拟仓库场景模型206,服务器2将数据处理优化工作路线,无人叉车控制模块6包括身份认证模块601、人工智能操控系统602、防碰撞安
全仪603、超载检测仪604、车臂检测仪605、车速检测仪606、能源检测仪607,人工智能操控系统602、防碰撞安全仪603、超载检测仪604、车臂检测仪605、车速检测仪606、能源检测仪607的数据通过叉车数据传输模 4传导到服务器2,可保障无人叉车控制模块6规避违规操作,减少风险,安全稳定地工作。
24.进一步的,视频监控系统3将监控到的仓库场景、货物堆积情况、人员流动路线、无人叉车控制模块6活动轨迹数据传导到服务器2,为虚拟建模场景202建模提供数据。
25.进一步的,身份认证模块601辅助无人叉车控制模块6在服务器2的虚拟建模场景202中定位、接收无线局域网模块5传达的指令,可保障每一部不同编号的无人叉车控制模块6接收到各自的程序指令,分工合作执行工作命令。
26.进一步的,服务器2接收到视频监控系统3、叉车数据传输模4的传输数据,生成虚拟建模场景202,为运行路线模拟系统201提供精准数据。
27.进一步的,虚拟建模场景202中的虚拟叉车模型203、虚拟人员模型204、虚拟货物模型205、虚拟仓库场景模型206经过运行路线模拟系统201的运算,得出最优的无人叉车控制模块6工作路线,有效的减少无人叉车控制模块6 多余的、不必要的冗杂动作,极大的提升工作效率,保障设备安全稳定运行。
28.进一步的,统筹全局操控系统1根据运行路线模拟系统201得出的数据作出调整指令,指令通过无线局域网模块5传达给无人叉车控制模块6,无人叉车控制模块6忠实地执行统筹全局操控系统1颁发出来的指令,可无间歇 24小时工作,能有效的降低人工成本,极大的提升工作效率。
29.工作原理
30.本实用新型包括统筹全局操控系统1、服务器2、运行路线模拟系统201、虚拟建模场景202、虚拟叉车模型203、虚拟人员模型204、虚拟货物模型205、虚拟仓库场景模型206、视频监控系统3、叉车数据传输模4、无线局域网模块5、无人叉车控制模块6、身份认证模块601、人工智能操控系统602、防碰撞安全仪603、超载检测仪604、车臂检测仪605、车速检测仪606、能源检测仪607,在使用时,通过设置的服务器2,虚拟建模场景202能实时模拟出工作场地的环境,运行路线模拟系统201可根据虚拟建模场景202对无人叉车控制模块6的工作程序作出相应对的调整,制作出最优的工作路线,有效的减少多余的、不必要的冗杂动作,极大的提升工作效率,保障设备安全稳定运行,通过设置的无人叉车控制模块6,可无间歇24小时工作,其中设置的身份认证模块601可保障每一部不同编号的无人叉车控制模块6接收到各自的程序指令,分工合作执行工作命令,人工智能操控系统602可保障无人叉车控制模块6忠实地执行统筹全局操控系统1颁发出来的指令,防碰撞安全仪603、超载检测仪604、车臂检测仪605、车速检测仪606、能源检测仪607等装置可保障无人叉车控制模块6安全稳定地工作。
31.需要说明的是,在本文中,诸如第一和第二(一号、二号)等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并
不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
32.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1