一种轮式移动消防机器人控制系统
1.本发明涉及消防设备技术领域,尤其是一种轮式移动消防机器人控制系统。
背景技术:
2.目前,随着社会经济的快速发展,火灾频发,给人类带来的灾害也不断升级,火灾已成为当今世界上严重威胁人类生存和发展的灾害之一。易发生火灾的场所大多是易燃易爆物的聚集地,随时有爆炸的危险,火灾现场产生的高温、有毒有害气体和大面积浓烟等危害环境是消防人员必须面对的,假如没有有效的设备及措施代替救援人员深入火灾现场进行灭火救援,会造成无辜伤亡和更大的损失。消防机器人的产生,可以有效的解决上述火灾现场的困难,但是,目前的消防机器人控制系统功能较为单一,且普遍为专用型嵌入式架构控制系统,可扩展性差。
技术实现要素:
3.本发明提出一种轮式移动消防机器人控制系统,采用工控机和多总线架构,其遥控通讯设备对火灾现场的抗干扰能力强,实用性高。
4.本实用新型采用以下技术方案。
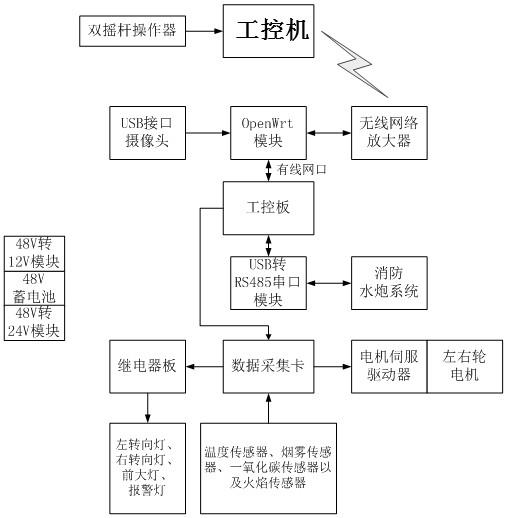
5.一种轮式移动消防机器人控制系统,包括机器人本体和对机器人进行遥控的远程控制设备;所述远程控制设备包括工控机和操作器,经无线网络模块以无线通讯方式与机器人的串口通讯模块相连;所述无线网络模块设于机器人本体、远程控制设备处,包括无线网络放大器和openwrt模块;所述机器人的工控板与串口通信模块相连以接收远程控制设备的操作指令并执行对应任务。
6.所述无线网络放大器为可强化无线wifi通讯信号使之能抵抗火灾现场干扰的无线网络放大器;所述机器人、远程控制设备处的openwrt模块的天线口和无线网络放大器相连接以增强wifi信号强度;所述远程控制设备处的openwrt模块通过wifi与工控机相连;所述工控机与操作器相连。
7.所述串口通信模块包括usb转rs485串口模块。
8.所述操作器为双摇杆操作器。
9.所述机器人还包括电源供给模块和与工控板相连的伺服驱动系统;机器人的工控板还与消防水炮系统、继电器板、外部电气设备、数据采集卡;所述数据采集卡与传感器模块相连;所述机器人本体处的openwrt模块经usb接口与机器人的摄像头相连。
10.所述工控板通过usb口和数据采集卡相连接,通过有线网口与机器人本体处的openwrt模块相连接,通过usb转rs485串口与消防水炮相连接。
11.所述数据采集卡的ad口与传感器模块相连;所述数据采集卡的i/o口与伺服驱动系统的左右轮伺服驱动器相连接,提供驱动器输入使能和伺服电机正反转控制信号;数据采集卡的pwm口与伺服驱动系统的左右轮伺服驱动器相连接,通过对驱动器脉冲信号的给定来对伺服电机进行速度控制;所述数据采集卡的i/o口还与继电器板相连接。
12.所述传感器模块包括温度传感器、烟雾传感器、一氧化碳传感器、火焰传感器;所述继电器板和机器人处的前大灯、左转灯、右转灯、警报器相连接。
13.所述伺服驱动系统包括左右轮电机制动器和与电源供给模块相连的左右轮伺服驱动器、伺服电机;所述电源供给模块包括48v蓄电池组、48v转24v电压转换模块以及48v转12v电压转换模块。
14.所述48v蓄电池组和左右轮伺服驱动器相连接;所述48v转24v电压转换模块分别和机器人的左右轮电机制动器、前大灯相连接;所述48v转12v电压转换模块分别和机器人的工控板、openwrt模块、摄像头、无线网络放大器、消防水炮、继电器板、左转灯、右转灯、警报器相连接。
15.综上所述,本实用新型具有结构设计合理、功能齐全以及扩展性良好等优点,具有以下有益效果:所述openwrt模块可以与工控板进行本地数据交互,与远程控制设备进行wifi数据交互,还可采集视频;所述无线网络放大器,可以大大提高轮式移动消防机器人与远程控制端的通信距离;所述数据采集卡可进行多种功能实施,包括轮式移动消防机器人车体的运动控制,外部左转灯、右转灯、警报器的开启与关闭控制,温度传感器、烟雾传感器、一氧化碳传感器以及火焰传感器的信号采集,实现单块数据采集卡的多种用途,有效节省了轮式移动消防机器人控制系统的电子元件数量,降低接线复杂度。所述工控板本身接口十分丰富,方便进行系统的再开发和功能扩展。
附图说明
16.下面结合附图和具体实施方式对本实用新型进一步详细的说明:
17.附图1是本实用新型的供电连接示意图;
18.附图2是本实用新型的硬件原理示意图;
19.附图3是本实用新型的机器人本体示意图;
20.图中:1-消防水炮;2-左右轮伺服驱动器;3-伺服电机。
具体实施方式
21.如图所示,一种轮式移动消防机器人控制系统,包括机器人本体和对机器人进行遥控的远程控制设备;所述远程控制设备包括工控机和操作器,经无线网络模块以无线通讯方式与机器人的串口通讯模块相连;所述无线网络模块设于机器人本体、远程控制设备处,包括无线网络放大器和openwrt模块;所述机器人的工控板与串口通信模块相连以接收远程控制设备的操作指令并执行对应任务。
22.所述无线网络放大器为可强化无线wifi通讯信号使之能抵抗火灾现场干扰的无线网络放大器;所述机器人、远程控制设备处的openwrt模块的天线口和无线网络放大器相连接以增强wifi信号强度;所述远程控制设备处的openwrt模块通过wifi与工控机相连;所述工控机与操作器相连。
23.所述串口通信模块包括usb转rs485串口模块。
24.所述操作器为双摇杆操作器。
25.所述机器人还包括电源供给模块和与工控板相连的伺服驱动系统;机器人的工控板还与消防水炮系统、继电器板、外部电气设备、数据采集卡;所述数据采集卡与传感器模
块相连;所述机器人本体处的openwrt模块经usb接口与机器人的摄像头相连。
26.所述工控板通过usb口和数据采集卡相连接,通过有线网口与机器人本体处的openwrt模块相连接,通过usb转rs485串口与消防水炮1相连接。
27.所述数据采集卡的ad口与传感器模块相连;所述数据采集卡的i/o口与伺服驱动系统的左右轮伺服驱动器相连接,提供驱动器输入使能和伺服电机正反转控制信号;数据采集卡的pwm口与伺服驱动系统的左右轮伺服驱动器相连接,通过对驱动器脉冲信号的给定来对伺服电机进行速度控制;所述数据采集卡的i/o口还与继电器板相连接。
28.所述传感器模块包括温度传感器、烟雾传感器、一氧化碳传感器、火焰传感器;所述继电器板和机器人处的前大灯、左转灯、右转灯、警报器相连接。
29.所述伺服驱动系统包括左右轮电机制动器和与电源供给模块相连的左右轮伺服驱动器2、伺服电机3;所述电源供给模块包括48v蓄电池组、48v转24v电压转换模块以及48v转12v电压转换模块。
30.所述48v蓄电池组和左右轮伺服驱动器相连接;所述48v转24v电压转换模块分别和机器人的左右轮电机制动器、前大灯相连接;所述48v转12v电压转换模块分别和机器人的工控板、openwrt模块、摄像头、无线网络放大器、消防水炮、继电器板、左转灯、右转灯、警报器相连接。
31.实施例:
32.在使用消防机器人时,把双摇杆操作器和工控机相连接,工控机通过wifi连接openwrt模块,远程登录工控板操作系统,运行工控板控制模块,使远程控制设备通过无线网络模块远程登录工控板,进行远程操控。
33.消防机器人以其车体水炮供水口处连接的供水软管提供灭火水源,在消防机器人进入火场时,操作人员可在工控机处查看传感器数据和火场视频,控制消防机器人本体移动方向,控制消防水炮的工作。
34.优选地,可通过研发,把工控机的相应功能移植到pc机上,以便于本实用新型的布署。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1