一种基于流式细胞仪自动注液以及开机报警声清除电路的制作方法
1.本实用新型涉及流式细胞仪技术领域,具体为一种基于流式细胞仪自动注液以及开机报警声清除电路。
背景技术:
2.流式细胞仪是对细胞进行自动分析和分选的装置。它可以快速测量、存贮、显示悬浮在液体中的分散细胞的一系列重要的生物物理、生物化学方面的特征参量,并可以根据预选的参量范围把指定的细胞亚群从中分选出来。流式细胞仪中,鞘液是必须的,目前常规的流式细胞仪当鞘液不足时往往以人工加注的办法来进行,无法进行自动运行,增加了操作人员的劳动强度,另外,当流式细胞仪出现鞘液不足或者压力不足等其他情况时,会通过蜂鸣器报警来提醒用户,在实际控制中,因为信号时序设定容易造成开机时出现短暂的蜂鸣声,而目前解决的方法是想办法控制信号时序来实现,导致控制电路变得非常复杂,提高了成本。
技术实现要素:
3.为了解决现有流失细胞仪中鞘液加注需要手动控制,增加了劳动强度,且控制开机报警的电路复杂,成本高的问题,本实用新型提供了一种基于流式细胞仪自动注液以及开机报警声清除电路,其能够实现鞘液的自动加注,而且控制电路结构简单,降低成本。
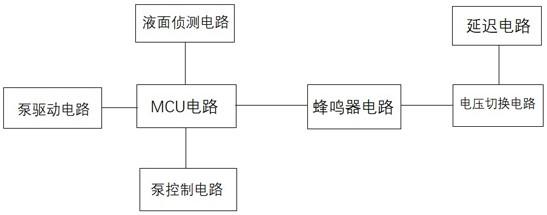
4.其技术方案是这样的:一种基于流式细胞仪自动注液以及开机报警声清除电路,其包括mcu电路,由单片机u1用于实现系统的主控制;
5.蜂鸣器电路,包括蜂鸣器,用于提供报警声;
6.其特征在于,其还包括:
7.延迟电路,用于延迟给蜂鸣器供电;
8.电压切换电路,用于切换提供给蜂鸣器连接的工作电压;
9.液面侦测电路,用于连接传感器来侦测鞘液的液面;
10.泵控制电路,用于控制泵是否工作;
11.泵驱动电路,用于控制泵工作电压从而控制泵加注鞘液的流速。
12.其进一步特征在于,所述延迟电路包括电阻r1、电容c1、二极管d1和mos管q1,所述电阻r1一端和所述二极管d1的负极连接12v电源,所述电阻r1另一端和所述二极管d1的正极相连后连接电容c1一端和mos管q1的栅端,所述电容c1另一端接地,所述mos管q1的源端接地、漏端连接所述电压切换电路;
13.所述电压切换电路包括电阻r2、电阻r3和mos管q2,所述电阻r2一端连接所述延迟电路,所述电阻r2另一端连接电阻r3一端和所述mos管q2的栅端,所述电阻r3另一端和所述mos管q2的源端均连接所述12v电源,所述mos管q2的漏端连接所述蜂鸣器的正极,所述蜂鸣器的负极连接所述单片机u1的3脚;
14.所述液面侦测电路包括连接鞘液监测传感器的电阻r4和电阻r5,所述电阻r4和电
阻r5分别连接所述单片机u1的19脚和18脚;
15.所述泵控制电路包括一端连接所述单片机u1的13脚的电阻r6,所述电阻r6另一端连接mos管q4的栅端,所述mos管q4的源端接地、漏端连接发光二极管d2的负极和泵的2脚,所述二极管d2的正极通过电阻r8连接12v电源:
16.所述泵驱动电路包括一端连接所述单片机u1的9脚的电阻r7,所述电阻r7另一端连接三极管q3的基极,所述三极管q3的发射极接地、集电极连接电阻r11一端,所述电阻r11另一端连接电阻r9一端、电阻r10一端、稳压器u2的adj脚,所述电阻r10另一端接地,所述稳压器u2的vin脚连接12v电源和二极管d3的负极,所述稳压器u2的out1脚和out2脚连接所述电阻r9另一端、所述二极管d3的正极、二极管d4的负极、电容c3一端、所述泵的1脚。
17.采用本实用新型后,增加了液面侦测电路来侦测鞘液的液面,再由泵控制电路和泵驱动电路来是实现鞘液的自动加注,对于蜂鸣器报警的控制,直接由延迟电路和电压切换电路来实现,省去了复杂的时序控制电路,大大简化了电路结构,降低了成本。
附图说明
18.图1为本实用新型原理图;
19.图2为mcu电路原理图;
20.图3为延迟电路原理图;
21.图4为电压切换电路原理图;
22.图5为蜂鸣器电路原理图;
23.图6为液面侦测电路原理图;
24.图7为泵控制电路原理图;
25.图8为泵驱动电路原理图。
具体实施方式
26.见图1至图8所示,一种基于流式细胞仪自动注液以及开机报警声清除电路,其包括mcu电路,由单片机u1用于实现系统的主控制,供电电压为5v,使用型号为pic16f690-i/p,本技术中单片机u1的作用只是简单的接收鞘液液面信号并输出报警信号和泵控制信号,该控制是单片机基本功能,没有对软件方法做改进。
27.蜂鸣器电路,包括蜂鸣器buzz,用于提供报警声,负极连接单片机u1的3脚。
28.延迟电路,用于延迟给蜂鸣器供电,包括电阻r1、电容c1、二极管d1和mos管q1,电阻r1一端和二极管d1的负极连接12v电源,电阻r1另一端和二极管d1的正极相连后连接电容c1一端和mos管q1的栅端,电容c1另一端接地,mos管q1的源端接地、漏端连接电压切换电路;电压切换电路,用于切换提供给蜂鸣器连接的工作电压,包括电阻r2、电阻r3和mos管q2,电阻r2一端连接延迟电路,电阻r2另一端连接电阻r3一端和mos管q2的栅端,电阻r3另一端和mos管q2的源端均连接12v电源,mos管q2的漏端连接蜂鸣器buzz的正极,用于给蜂鸣器buzz供电;利用电阻r1和电容c1的rc延迟,提供mos管q1的延迟开启电压,经过电阻r2和电阻r3延迟输入电压供给蜂鸣器buzz,二极管d1让关机后快速释放mos管q1栅极的电容c1存储的电压,电路结构简单,带来好的成本效益。
29.利用给蜂鸣器供电延迟可调,确保蜂鸣器的供电在开机,mcu提供的信号完成后方
才正常供电,从而避免因mcu开机时没有正常输出信号,而蜂鸣器已经正常供电从而带来设备开机出现短暂的峰鸣声的问题,让设备更具可靠性。
30.液面侦测电路,用于连接传感器来侦测鞘液的液面,包括连接鞘液监测传感器的电阻r4和电阻r5,电阻r4和电阻r5分别连接单片机u1的19脚和18脚,分别侦测鞘液液面不足和鞘液液面已满。
31.泵控制电路,用于控制泵是否工作,包括一端连接单片机u1的13脚的电阻r6,电阻r6另一端连接mos管q4的栅端,mos管q4的源端接地、漏端连接发光二极管d2的负极和泵的2脚,发光二极管d2的正极通过电阻r8连接12v电源,发光二极管d2来只是泵是否正常工作。
32.泵驱动电路,用于控制泵工作电压从而控制泵加注鞘液的流速,包括一端连接所述单片机u1的9脚的电阻r7,所述电阻r7另一端连接三极管q3的基极,所述三极管q3的发射极接地、集电极连接电阻r11一端,所述电阻r11另一端连接电阻r9一端、电阻r10一端、稳压器u2的adj脚,所述电阻r10另一端接地,所述稳压器u2的vin脚连接12v电源和二极管d3的负极,所述稳压器u2的out1脚和out2脚连接所述电阻r9另一端、所述二极管d3的正极、二极管d4的负极、电容c3一端、所述泵的1脚。这里的二极管d3和二极管d4为保护电路,提供对泵pump供给电压上下限的限定值,避免切换造成损坏。
33.用鞘液监测传感器提供电平信号给mcu,mcu收到后根据状态送出泵驱动信号以及开关控制信号,泵驱动信号加给三极管q3的基极,三极管q3的发射极和集电极会形成一个低的电阻值,与反馈电阻r9进行并联,进而增加线性电源的输出电压,进而提供泵的工作电压达到提升注液速度;液位正常时泵驱动信号为低电平,三极管q3截止,线性电源的输出电压较低,泵的工作电压低将低速注液;开关控制信号当液面未满时,输出高电平使mos管q4开启,让泵工作;液面已经满时,输出的低电平使mos管q4关闭,不提供泵电压进而停止工作。让仪器更自动化,以及带来好的性能效益。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1