一种无人搬运车避障急停机构的制作方法
1.本实用新型涉及一种agv搬运小车结构领域,更具体地说,涉及一种无人搬运车避障急停机构。
背景技术:
2.传统的无人搬运车运行的过程中,为了避免与障碍物相撞,通常会设置一个障碍物传感器在车头检测障碍物。但是,由于实际的工厂环境较为复杂,往往需要增加辅助避障传感器来检测障碍物。多个障碍物传感器则需要多个对应的agv控制器来处理停车的开关信号,当控制agv停车的信号过多的时,需增加agv控制器的信号输入点数,该方式不仅产品的成本增加了,软件以及电路上的控制也会变得更加复杂。
3.除了障碍物传感器的停止信号输入,还会有外部的紧急停止按钮信号输入,以及软件控制系统判断的内部停止信号输入,这些其他急停信号的增加,也导致了控制以及电路的复杂化。
技术实现要素:
4.本实用新型为了克服现有技术中存在的传统的无人搬运车生产成本高且操控复杂的问题,现提供具有生产成本较低和操作简单的一种无人搬运车避障急停机构。
5.本实用新型的一种无人搬运车避障急停机构,一种无人搬运车避障急停机构,包括搬运车本体,所述的搬运车本体内分别设有plc控制器和avg控制器,所述的搬运车本体的前端设有用于检测位于搬运车本体前方的障碍物的障碍传感器,所述的搬运车本体左右两侧分别设有用于检测搬运车本体周围障碍物的辅助传感器,所述的障碍传感器的信号输出端和辅助传感器的信号输出端分别与plc控制器的信号输入端电性连接,所述的辅助传感器的信号输入端与avg控制器的信号输出端电性连接。
6.所述的障碍传感器和辅助传感器均采用超声波雷达,其型号为dpk-15。
7.本实用新型内容基于mkii型agv,当障碍传感器感应到多个障碍物时,plc控制器会启动辅助传感器,当plc控制器判断当前环境需要对搬运车本体进行制动时,会将信号发送给avg控制器来制动搬运车本体。
8.当使用者需要远程对搬运车本体进行制动时,通过设置天线来接收外部停止信号,通过plc控制器来处理外部停止信号输入,再将信号发送给avg控制器来制动搬运车本体。
9.当使用者需要当场对搬运车本体进行制动时,通过安装急停按钮,通过急停按钮来操控avg控制器对搬运车本体进行紧急制动。
10.在实际情况下外部的停止要求的数量可能会多会少,本实用新型利用了单个的信号入力来统一各个避障停止信号,使得控制简化,增加了避障停止的可靠性。
11.作为优选,所述的搬运车本体顶部装有用于接收无线信号的天线,所述的天线的信号传送端与plc控制器的信号接收端电性连接,所述的搬运车本体尾端装有用于紧急制
动的防尘急停按钮,所述的辅助传感器与avg控制器间电性连接有用于控制辅助传感器的继电器。
12.作为优选,所述的障碍传感器的1引脚与plc控制器的1引脚电性连接,所述的障碍传感器的2引脚分别与辅助传感器的2引脚和防尘急停按钮的一端电性连接,所述的防尘急停按钮的另一端与avg控制器的3引脚电性连接,所述的plc控制器的2引脚与继电器的1引脚电性连接,所述的plc控制器的3引脚与天线的1引脚电性连接,所述的plc控制器的4引脚与天线的2引脚电性连接,所述的辅助传感器的1引脚与继电器的4引脚电性连接,所述的继电器的2引脚与avg控制器的2引脚电性连接,所述的继电器的3引脚与avg控制器的1引脚电性连接。
13.作为优选,所述的防尘急停按钮包括作为主体的按钮,所述的按钮外设有用于安装按钮的按钮槽,所述的按钮槽底部设有与按钮配合使用的接触器。
14.作为优选,所述的按钮左右两侧分别设有用于阻挡空气中的灰尘进入的防尘组件,所述的按钮槽开口的左右两侧分别设有与防尘组件配合使用的挡板。
15.作为优选,所述的按钮槽的凹槽底部与按钮的底部之间设有用于将按钮进行复位的复位弹簧。
16.作为优选,所述的防尘组件包括用于支撑的防尘支架,所述的防尘支架前端设有与挡板配合使用的防尘板,所述的防尘板上端贴有用于阻隔灰尘的橡胶垫片。
17.防尘板和挡板的配合使用,可以让按钮在不使用时阻挡灰尘进入按钮内,从而提高按钮的使用寿命。
18.利用橡胶垫片既可以阻挡部分灰尘进入按钮内,又可以在按钮复位时吸收部分压力,从而提高按钮的使用寿命,提高按钮的稳定性。
19.利用复位弹簧可以在手松开按钮后,自动对按钮进行复位。
20.本实用新型具有以下有益效果:使用寿命长,稳定性高,生产成本低,使用方便。
附图说明
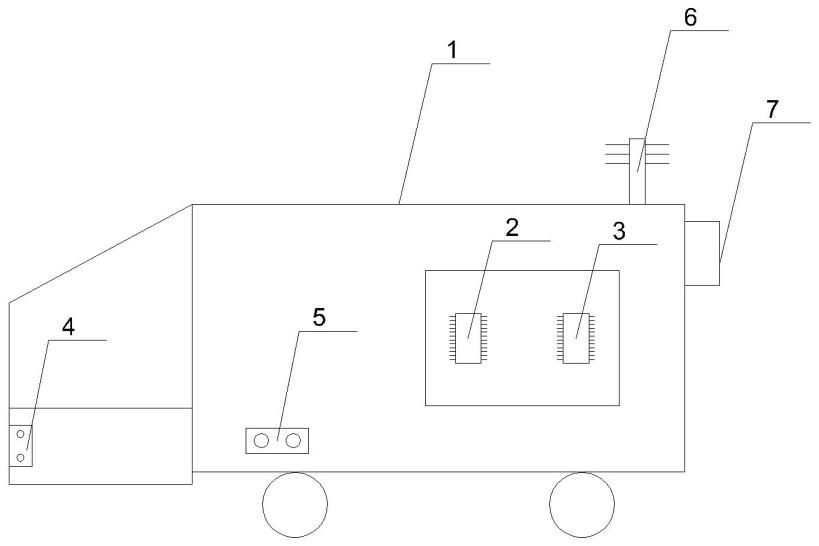
21.附图1为本实用新型的结构示意图。
22.附图2为本实用新型的电路原理示意图。
23.附图3为本实用新型的防尘急停按钮的结构示意图。
24.搬运车本体1,plc控制器2,avg控制器3,障碍传感器4,辅助传感器5,天线6,防尘急停按钮7,继电器8,按钮9,按钮槽10,接触器11,挡板12,复位弹簧13,防尘支架14,防尘板15,橡胶垫片16。
具体实施方式
25.下面通过实施例,并结合附图,对本实用新型的技术方案作进一步具体的说明。
26.实施例:根据附图1、附图2和附图3对本实用新型进行进一步说明,本例的一种无人搬运车避障急停机构,包括搬运车本体1,所述的搬运车本体1内分别设有plc控制器2和avg控制器3,所述的搬运车本体1的前端设有用于检测位于搬运车本体1前方的障碍物的障碍传感器4,所述的搬运车本体1左右两侧分别设有用于检测搬运车本体1周围障碍物的辅助传感器5,所述的障碍传感器4的信号输出端和辅助传感器5的信号输出端分别与plc控制
器2的信号输入端电性连接,所述的辅助传感器5的信号输入端与avg控制器3的信号输出端电性连接。
27.所述的搬运车本体1顶部装有用于接收无线信号的天线6,所述的天线6的信号传送端与plc控制器2的信号接收端电性连接,所述的搬运车本体1尾端装有用于紧急制动的防尘急停按钮7,所述的辅助传感器5与avg控制器3间电性连接有用于控制辅助传感器5的继电器8。
28.所述的障碍传感器4的1引脚与plc控制器2的1引脚电性连接,所述的障碍传感器4的2引脚分别与辅助传感器5的2引脚和防尘急停按钮7的一端电性连接,所述的防尘急停按钮7的另一端与avg控制器3的3引脚电性连接,所述的plc控制器2的2引脚与继电器8的1引脚电性连接,所述的plc控制器2的3引脚与天线6的1引脚电性连接,所述的plc控制器2的4引脚与天线6的2引脚电性连接,所述的辅助传感器5的1引脚与继电器8的4引脚电性连接,所述的继电器8的2引脚与avg控制器3的2引脚电性连接,所述的继电器8的3引脚与avg控制器3的1引脚电性连接。
29.所述的防尘急停按钮7包括作为主体的按钮9,所述的按钮9外设有用于安装按钮9的按钮槽10,所述的按钮槽10底部设有与按钮9配合使用的接触器11。
30.所述的按钮9左右两侧分别设有用于阻挡空气中的灰尘进入的防尘组件,所述的按钮槽10开口的左右两侧分别设有与防尘组件配合使用的挡板12。
31.所述的按钮槽10的凹槽底部与按钮9的底部之间设有用于将按钮9进行复位的复位弹簧13。
32.所述的防尘组件包括用于支撑的防尘支架14,所述的防尘支架14前端设有与挡板12配合使用的防尘板15,所述的防尘板15上端贴有用于阻隔灰尘的橡胶垫片16。
33.以上所述仅为本实用新型的具体实施例,但本实用新型的结构特征并不局限于此,任何本领域的技术人员在本实用新型的领域内,所作的变化或修饰皆涵盖在本实用新型的专利范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1