一种无人巡检装置及煤仓无人巡检总成的制作方法
1.本实用新型属于无人巡检技术领域,尤其涉及一种无人巡检装置及煤仓无人巡检总成。
背景技术:
2.由于电厂的输送转运站、皮带栈桥内环境恶劣,距离较长,在当前人工巡检的模式下,很难及时发现设备出现问题前的征兆及已经出现的问题。输送系统查看煤仓工作依然采用人工方式,存在作业人员任务重、风险高等弊端。现场作业人员靠现场观察煤仓仓位情况,通过对讲机联系方式与输送集控制室联系设备的相关流程控制,作业方式原始,作业效率低,同时也存在一定作业风险。
技术实现要素:
3.为了解决上述技术问题,本实用新型的目的之一在于提供一种结构简单,且可灵活进行探测的无人巡检装置。
4.为了实现上述目的,本实用新型的技术方案如下:一种无人巡检装置,包括轨道、电动移动件、控制器和机械臂,所述电动移动件设置在所述轨道并可在所述轨道上沿所述轨道的长度方向往复移动,所述机械臂设置在所述电动移动件上,所述机械臂的驱动端安装有探测总成,所述电动移动件、机械臂、探测总成均与所述控制器电连接。
5.上述技术方案的有益效果在于:如此可由电动移动件带动所述控制器、机械臂和设置于机械臂驱动端的探测总成沿轨道往复移动并进行巡检,其中探测装置用以对巡检线路上的异常情况进行探测。
6.上述技术方案中还包括通讯模块,所述通讯模块设置在所述电动移动件上,并与所述控制器电连接,所述通讯模块与智能终端通信连接。
7.上述技术方案的有益效果在于:如此可由通讯模块与智能终端进行远程通讯,以便于及时的将探测总成所探测的实时情况通过通讯模块输送至智能终端。
8.上述技术方案中所述通讯模块为蓝牙模块或5g通信模块。
9.上述技术方案的有益效果在于:其可实现远程无线通信,可从远程对现场进行监控。
10.上述技术方案中所述控制器为arm系列单片机。
11.上述技术方案的有益效果在于:其成本低,且获取方便。
12.上述技术方案中所述智能终端为电脑或智能手机。
13.上述技术方案的有益效果在于:如此可使得操控人员在屏幕前即可查看现场情况。
14.上述技术方案中还包括蓄电池和无线充电装置,所述无线充电装置包括无线供电模块和无线受电模块,所述无线供电模块用以与电源电连接,所述无线受电模块和控制器均与所述蓄电池电连接,且所述无线受电模块和蓄电池均设置在所述电动移动件上。
15.上述技术方案的有益效果在于:如此可由蓄电池向整个无人巡检装置供电,而蓄电池通过无线充电的方式进行无线充电,且每次无人巡检装置巡检完后可移动至靠近无线供电模块进行无线充电。
16.上述技术方案中所述探测总成包括设置于所述机械臂驱动端的探测雷达和激光测距传感器,且所述探测雷达和激光测距传感器均与所述控制器电连接。
17.上述技术方案的有益效果在于:如此可由探测雷达和激光测距传感器协同对周边的环境的进行探测。
18.上述技术方案中所述探测总成还包括设置于所述机械臂驱动端的补光灯和半球摄像机,且所述补光灯和半球摄像机均与所述控制器电连接。
19.上述技术方案的有益效果在于:如此可由半球摄像机对周边环境进行摄像,同时有补光灯对周边环境进行补光,以提高半球摄像机的成像效果。
20.上述技术方案中所述电动移动件上还安装有红外摄像头和视觉避障传感器,所述红外摄像头和视觉避障传感器均与所述控制器电连接。
21.上述技术方案的有益效果在于:如此可通过红外摄像头和设局防撞传感器对电动移动件移动轨迹周边探测是否存在障碍物,以避免电动移动件与障碍物撞击。
22.本实用新型的目的之二在于提供一种结构简单,且可对煤炭转运站内进行无人巡检的煤仓无人巡检总成。
23.为了实现上述目的,本实用新型的技术方案如下:一种煤仓无人巡检总成,包括带式输送机、多个煤仓、多个犁煤器和如上所述的无人巡检装置,多个所述煤仓和多个所述犁煤器一一对应,多个所述煤仓沿所述带式输送机的输送方向间隔设置,每个所述犁煤器分别设置在所述带式输送机的上方并位于对应所述煤仓的上方,每个所述犁煤器用以将所述带式输送机上的煤炭导流至对应的所述煤仓内,所述轨道沿所述带式输送机的输送方向悬设在所述带式输送机的上方,且其两端靠近所述带式输送机的两端。
24.上述技术方案的有益效果在于:其结构简单,且可对整个带式输送机沿线进行巡检,同时可对每个煤仓内的储煤情况进行探测。
附图说明
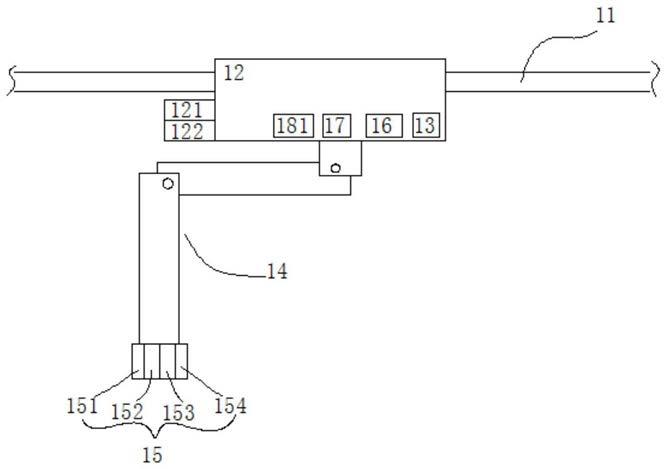
25.图1为本实用新型实施例所述无人巡检装置的结构简图;
26.图2为本实用新型实施例所述无人巡检装置的电连接图;
27.图3为本实用新型实施例所述煤仓无人巡检总成的结构简图。
28.图中:1无人巡检装置、11轨道、12电动移动件、121红外摄像头、122视觉避障传感器、13控制器、14机械臂、15探测总成、151探测雷达、152激光测距传感器、153补光灯、154半球摄像机、16通讯模块、17蓄电池、18无线充电装置、181无线供电模块、182无线受电模块、2带式输送机、3煤仓、4犁煤器。
具体实施方式
29.以下结合附图对本实用新型的原理和特征进行描述,所举实施例只用于解释本实用新型,并非用于限定本实用新型的范围。
30.实施例1
31.如图1和图2所示,本实施例提供了一种无人巡检装置,包括轨道11、电动移动件12、控制器13和机械臂14,所述电动移动件12设置在所述轨道11并可在所述轨道11上沿所述轨道11的长度方向往复移动,所述机械臂14设置在所述电动移动件12上(优选的,机械臂可设置于所述电动移动件的下端),所述机械臂14的驱动端安装有探测总成15,所述电动移动件12、机械臂14、探测总成15均与所述控制器13电连接,如此可由电动移动件带动所述控制器、机械臂和设置于机械臂驱动端的探测总成沿轨道往复移动并进行巡检,其中探测装置用以对巡检线路上的异常情况进行探测。其中,所述轨道可悬吊设置,且轨道和电动移动件可以共同组成一个吊轨式机器人(其属于现有技术,在此不作赘述),所述控制器优选为arm系列单片机或性能更强大的ite l芯片。
32.上述技术方案中还包括通讯模块16,所述通讯模块16设置在所述电动移动件12上,并与所述控制器13电连接,所述通讯模块16与智能终端通信连接,如此可由通讯模块与智能终端(可为智能手机或电脑)进行远程通讯,以便于及时的将探测总成所探测的实时情况通过通讯模块输送至智能终端,所述通讯模块可为5g通讯模块或蓝牙模块。
33.上述技术方案中还包括蓄电池17和无线充电装置18,所述无线充电装置18包括无线供电模块181和无线受电模块182,所述无线供电模块181用以与电源电连接,所述无线受电模块182和控制器13均与所述蓄电池17电连接,且所述无线受电模块182和蓄电池17均设置在所述电动移动件12上,如此可由蓄电池向整个无人巡检装置供电,而蓄电池通过无线充电的方式进行无线充电,且每次无人巡检装置巡检完后可移动至靠近无线供电模块进行无线充电,其中,无线充电装置属于现有技术,在此不作赘述。
34.上述技术方案中所述探测总成15包括设置于所述机械臂14驱动端的探测雷达151和激光测距传感器152,且所述探测雷达151和激光测距传感器152均与所述控制器13电连接,如此可由探测雷达和激光测距传感器协同对周边的环境的进行探测,优选的,所述探测雷达为超声雷达或激光雷达,所述机械臂可以为六自由度机械臂(其属于现有技术,在此不作赘述)。
35.上述技术方案中所述探测总成15还包括设置于所述机械臂14驱动端的补光灯153和半球摄像机154,且所述补光灯153和半球摄像机154均与所述控制器13电连接,如此可由半球摄像机对周边环境进行摄像,同时有补光灯对周边环境进行补光,以提高半球摄像机的成像效果。
36.上述技术方案中所述电动移动件12上还安装有红外摄像头121和视觉避障传感器122,所述红外摄像头121和视觉避障传感器122均与所述控制器13电连接,如此可通过红外摄像头和设局防撞传感器对电动移动件移动轨迹周边探测是否存在障碍物,以避免电动移动件与障碍物撞击。
37.实施例2
38.如图3所示,本实施例提供了一种煤仓无人巡检总成,包括带式输送机2、多个煤仓3、多个犁煤器4和如实施例1所述的无人巡检装置1,多个所述煤仓3和多个所述犁煤器4一一对应,多个所述煤仓3沿所述带式输送机2的输送方向间隔设置,每个所述犁煤器4分别设置在所述带式输送机2的上方并位于对应所述煤仓3的上方,每个所述犁煤器4用以将所述带式输送机2上的煤炭导流至对应的所述煤仓3内,所述轨道11沿所述带式输送机2的输送方向悬设在所述带式输送机2的上方,且其两端靠近所述带式输送机2的两端,其结构简单,
且可对整个带式输送机沿线进行巡检,同时可由探测雷达和激光测距传感器对每个煤仓内的储煤情况进行探测(由机械臂带动探测总成伸到煤仓的观察口处探测煤仓内的储煤高度)。
39.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1