一种分布式驱动系统的控制系统及电动环卫车的制作方法
1.本实用新型属于电动环卫技术领域,具体涉及一种分布式驱动系统的控制系统及电动环卫车。
背景技术:
2.随着城镇化进程加快带来环卫车辆的巨大需求和作业模式的变革,以及大气污染治理等持续推动背景下,新能源环卫车成未来趋势,市场需求将越来越大。
3.现有传统环卫车的驱动系统中的风机、高压水泵和齿轮油泵驱动采用动力源与作业装置通过皮带轮及皮带配合离合器驱动方式,使得驱动系统结构复杂、可靠性差,占用空间大,而且传动效率低,导致作业能耗高;驱动系统中的低压水泵通过传动轴连接在变速箱上,传动效率也不是最优,而且行车作业中水泵转速随车速变化而变化,导致作业效果不理想,并且在上坡工况作业整车行驶动力略显不足;驱动系统中的左、右扫盘作业通过齿轮油泵驱动变量马达实现旋转作业,系统传递效率低,而且扫盘作业转速在固定作业模式下单独无法调整。综上所述目前传统环卫车的驱动系统不但结构复杂、占用空间大、可靠性差、传递效率低及作业能耗高,而且作业装置控制响应时间较长。
技术实现要素:
4.本实用新型目的在于提供一种分布式驱动系统的控制系统,通过对驱动系统的改进,使得环卫车传动效率高、能耗低。
5.为了解决现有技术存在的上述问题,本实用新型所采用的技术方案为:
6.一种分布式驱动系统的控制系统,包括主控制器、多合一控制器、专用电机系和专用作业装置系。
7.所述专用电机系通过多合一控制器与主控制器电连接,专用电机系包括多个电机,所述专用作业装置系包括多个作业装置,多个电机与多个作业装置一一对应连接。
8.通过设置多合一控制器,利用多合一控制器对多个电机进行控制,使得整个控制系统更加简洁。
9.进一步的,所述专用电机系包括电机一、电机二、电机三、电机四、电机五和电机六。所述作业装置包含齿轮油泵、高压水泵、低压水泵、离心风机、左扫盘和右扫盘,所述齿轮油泵与电机一连接,所述高压水泵与电机二连接,所述低压水泵与电机三连接,所述离心风机与电机四连接,所述左扫盘与电机五连接,所述右扫盘与电机六连接。
10.所述多合一控制器控制专用电机系来直驱专用作业装置,其一,电机与作业装置形成直插式独立集成单元,中间无其他过渡装置,无需能量转化,且可靠性高,使得电机始终在高效区正常工作,并且驱动系统的传动效率达到最高及作业能耗最低;其二,电机与作业装置一一对应直驱,结构简单、布置灵活、占用空间小。
11.一种分布式驱动系统控制系统的控制方法,包括以下步骤:
12.s1:选择工作模式,当选择洒水模式、冲洗模式和吸水模式中的一种时,电机三运
行;
13.当选择抑尘模式或清洗模式时,控制电机一和电机二运行;
14.当选择清扫模式时,电机一、电机二、电机四、电机五和电机六同时运行。
15.s2:在洒水模式、冲洗模式和吸水模式下,当严重污染需要深度作业时,控制电机三按预设高转速vg维持运行;当轻度污染不需要深度作业时,控制电机三按预设目标转速vm持续运行;
16.在抑尘模式和清洗模式下,当严重污染需要深度作业时,控制电机二按预设高转速 vd持续运行,当轻度污染不需要深度作业时,控制电机二按预设目标转速vs持续运行;
17.在洗扫模式下,当严重污染需要深度作业时,控制电机二、电机四、电机五和电机六依次按预设高转速vd、va、vh和vh维持运行,当轻度污染不需要深度作业时,控制电机二、电机四、电机五和电机六按预设目标转速vs、vf、vb和vb持续运行;
18.在清扫模式下,当严重污染需要深度作业时,控制电机四、电机五和电机六按预设高转速va、vh和vh持续运行,当轻度污染不需要深度作业时,控制电机四、电机五和电机六按预设目标转速vf、vb和vb持续运行。
19.步骤s3:作业结束,控制电机一、电机二、电机三、电机四、电机五和电机六降速停机。
20.进一步的,所述步骤2还包括:根据扫盘的实际工况需求,若全扫模式时,控制电机五和电机六均按设定目标转速正常工作;若左扫模式时,控制电机五按设定目标转速工作;若右扫模式时,控制电机五按设定目标转速正常工作。作业主控制器按照环卫车使用具体工况,选择不同的作业模式发出控制指令,所述多合一控制器根据该指令控制专用电机系的各电机启停与转速升降,所述多合一控制器采用并联控制专用电机系的各电机工作。所述专用电机系在各作业模式下工作依次分为开始作业阶段、作业过程调速阶段、作业完成停机阶段。电机在各阶段的启停及转速升降控制中,根据不同的工作装置设置了专用的控制策略控制电机启动增速、过程转速升降以及减速停机,保证效率的同时避免工作部件和电机相互受瞬时大扭矩冲击,引起内部轴承和密封装置的损坏,延长了工作部件及电机的使用寿命。
21.一种电动环卫车,采用分布式驱动系统的控制系统。
22.本实用新型的有益效果为:通过多合一控制器控制专用电机系来直驱专用作业装置,其一,电机与作业装置形成直插式独立集成单元,中间无其他过渡装置,无需能量转化,且可靠性高,使得电机始终在高效区正常工作,并且驱动系统的传动效率达到最高及作业能耗最低;其二,电机与作业装置一一对应直驱,结构简单、布置灵活、占用空间小。
附图说明
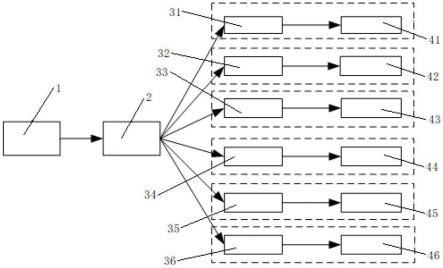
23.图1为本实用新型的控制系统的原理示意图。
24.图2为本实用新型中多合一控制器的连接示意图。
25.图中:1-作业主控制器;2-多合一控制器;31-电机一;32-电机二;33-电机三;34
‑ꢀ
电机四;35-电机五;36-电机六;41-齿轮油泵;42-高压水泵;43-低压水泵;44-离心风机;45-左扫盘;46-右扫盘。
具体实施方式
26.下面结合附图及附图标记对本实用新型作进一步阐述。
27.为了能够更清楚地理解本实用新型的上述目的、特征和优点,下面结合附图和具体实施例对本实用新型进行详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
28.术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
29.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
30.以下结合附图对本实用新型的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型,并不用于限制本实用新型。
31.实施例1:
32.如图1和2所示,一种分布式驱动系统的控制系统,包括主控制器、多合一控制器2、专用电机系和专用作业装置系。多合一控制器为现有技术,此处直接转用。
33.所述专用电机系通过多合一控制器2与主控制器电连接,专用电机系包括多个电机,所述专用作业装置系包括多个作业装置,多个电机与多个作业装置一一对应连接。
34.通过设置多合一控制器2,利用多合一控制器2对多个电机进行控制,使得整个控制系统更加简洁。
35.所述专用电机系包括电机一31、电机二32、电机三33、电机四34、电机五35和电机六36;
36.所述作业装置包含齿轮油泵41、高压水泵42、低压水泵43、离心风机44、左扫盘 45和右扫盘46,所述齿轮油泵41与电机一31连接,所述高压水泵42与电机二32连接,所述低压水泵43与电机三33连接,所述离心风机44与电机四34连接,所述左扫盘45 与电机五35连接,所述右扫盘46与电机六36连接。
37.实施例2:
38.在实施例1的基础上,一种分布式驱动系统控制系统的控制方法,包括以下步骤:
39.s1:选择工作模式,当选择洒水模式、冲洗模式和吸水模式中的一种时,电机三33 运行;
40.当选择抑尘模式或清洗模式时,控制电机一31和电机二32运行;
41.当选择清扫模式时,电机一31、电机二32、电机四34、电机五35和电机六36同时运行。
42.s2:在洒水模式、冲洗模式和吸水模式下,当严重污染需要深度作业时,控制电机三33按预设高转速vg维持运行;当轻度污染不需要深度作业时,控制电机三33按预设目标转速vm持续运行;
43.在抑尘模式和清洗模式下,当严重污染需要深度作业时,控制电机二32按预设高转速vd持续运行,当轻度污染不需要深度作业时,控制电机二32按预设目标转速vs持续运
行;
44.在洗扫模式下,当严重污染需要深度作业时,控制电机二32、电机四34、电机五35 和电机六36依次按预设高转速vd、va、vh和vh维持运行,当轻度污染不需要深度作业时,控制电机二32、电机四34、电机五35和电机六36按预设目标转速vs、vf、vb和 vb持续运行;
45.在清扫模式下,当严重污染需要深度作业时,控制电机四34、电机五35和电机六 36按预设高转速va、vh和vh持续运行,当轻度污染不需要深度作业时,控制电机四34、电机五35和电机六36按预设目标转速vf、vb和vb持续运行。
46.步骤s3:作业结束,控制电机一31、电机二32、电机三33、电机四34、电机五35 和电机六36降速停机。
47.所述步骤2还包括:根据扫盘的实际工况需求,若全扫模式时,控制电机五35和电机六36均按设定目标转速正常工作;若左扫模式时,控制电机五35按设定目标转速工作;若右扫模式时,控制电机五35按设定目标转速正常工作。
48.实施例3:
49.在实施例1的基础上,一种电动环卫车,采用分布式驱动系统的控制系统。
50.本实用新型不局限于上述可选实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是落入本实用新型权利要求界定范围内的技术方案,均落在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1