用于运行工业设施的方法与流程
1.本发明涉及一种用于运行工业设施(technische anlage)的方法,该工业设施具有至少一个移动系统,其中,绘制工业设施的地图,该地图具有关于至少一个可行驶区域和至少一个禁止区域的信息。
背景技术:
2.工业设施尤其是涉及工业应用,例如制造工厂。工业设施的移动系统例如为自动行驶的车辆。移动系统例如用于在工业设施之内运输物件。例如,移动系统用于在工业设施之内输送物件。由工业设施建立地图,该地图具有关于移动系统可行驶的区域和对于移动系统禁止的区域的信息。工业设施的可行驶的区域包括行驶路径,移动系统可在行驶路径上运动。
3.从文献de 102019001 253 a1中已知一种用于运行工业设施的方法,工业设施具有至少一个移动系统,移动系统可在工业设施的交通面上行驶。移动系统借助于相应的传感器检测在工业设施中的对象。此时,将如此检测到的对象的位置与根据工业设施的地图推测的对象位置比较。
4.尤其从文献de 102018002 378 a1、de 102018009 114 a1、de 102019000903 a1中已知另外的用于运行具有移动系统的工业设施的方法,其中,创建工业设施的地图或地形图。
5.从文献us 2010/0293517 a1中已知一种用于制作用于描述具有空置面和占用面的场地的图形结构的方法。在此,由拓扑的图形结构的点和最近的占用面点的位置信息形成该图形结构。
6.在filipe j.、fred a.(编者)的agents and artificial intelligence(代理与人工智能)(icaart2012.计算机和信息学术交流会,第358卷,2013年,springer出版社,berlin,heidelberg)中作者portugal、david rocha、rui p.的论文“retrieving topological information for mobile robots provided with grid maps”(url:https://doi.org/10.1007/978-3-642-36907-0 14)描述了一种用于提取用于移动机器人的拓扑地图的方法。
7.在ieee期刊“transactions on pattern analysis and machine intelligence”(第26卷,2004,第10册,第1367-1372页,001:10.1109/tpami.2004.75)中作者gordella、luigi p.等的论文“a(sub)graph isomorphism algorithm for matching large graphs”(url:https:llieeexplore,ieee.org/stamp/stamp.jsp?tp=&arnumber=1323804)描述了一种用于叠加图形的算法。
8.在规划工业设施时,通常借助于cad系统绘制工业设施的基础地图。该基础地图具有关于移动系统可行驶的区域和对于移动系统禁止的区域的信息,以及关于为移动系统规划的行驶路径的信息。常常出现,所述工业设施的构造与规划有偏差。例如,代表对于移动系统禁止的区域的不可动的对象与为其规定的位置错开。在这种情况中,移动系统实际可
行驶的区域与通过cad系统规划的可行驶的区域不一致。
技术实现要素:
9.本发明提出的目的是,改进用于运行工业设施的方法。在此,尤其是应识别并修正在工业设施的基础地图中的错误。
10.该目的通过具有在权利要求1中所述的特征的用于运行工业设施的方法实现。有利的设计方案和改进方案是从属权利要求的主题。
11.提出一种用于运行具有至少一个移动系统的工业设施的方法。工业设施尤其是涉及工业应用,例如制造工厂。工业设施的移动系统例如为自动行驶的车辆,其用于在工业设施之内运输物件。
12.按照根据本发明的方法,例如借助于cad系统生成工业设施的基础地图。在此,基础地图具有关于至少一个移动系统可行驶的区域和关于至少一个对于移动系统禁止的区域的信息。此外,绘制工业设施的修正地图,修正地图同样具有关于至少一个移动系统可行驶的区域和至少一个对于移动系统禁止的区域/封锁区域的信息。例如由移动系统生成修正地图,移动系统借助于相应的传感器检测在工业设施中不可动的对象。也可设想,由移动系统生成基础地图,移动系统借助于相应的传感器检测在工业设施中不可动的对象。于是,尤其是由另一移动系统和/或在另一时刻和/或借助于其它传感器——例如在与基础地图不同的高度中——生成修正地图。
13.紧接着,将生成的基础地图与生成的修正地图叠加。此时,通常识别出在基础地图的拓扑特征和修正地图的相应拓扑特征之间的相似度。在此,当识别出在基础地图的度量特征与修正地图的度量特征之间的偏差时,由修正地图的度量特征替代基础地图的至少一个度量特征。
14.本发明的想法是,通常基础地图描述工业设施的理论状态,尤其是描述行驶路径的理论参数,而修正地图描述工业设施的实际状态,尤其是米制地图的实际状态。因此,通常假设修正地图的度量特征是正确的。如果在基础地图与修正地图之间的度量特征中识别到偏差,则因此将基础地图的度量特征视为错误的。
15.相反地,修正地图通常是不完整的并且仅仅示出工业设施的一部分(其相应于基础地图的局部),和/或不包含所有运行工业设施所需的信息。由此,为了运行工业设施,主要目标不是由修正地图替代全部的基础地图。
16.根据本发明的方法实现,识别并且相对快速地修正在工业设施的基础地图中的错误。尤其是实现,修正在基础地图中识别出的度量错误。尤其是,与手动地通过员工调整基础地图(这是相对费时的)相比,显著更快速地进行基础地图的修正。在此,根据本发明的方法是相对稳健的。在应用该方法之后,提供关于工业设施的最新信息,该最新信息紧接着可用于在技术设施之内为移动系统导航。度量特征例如为长度,尤其是在两个点之间的距离,以及角度。度量特征尤其是与不同地图的不同比例尺无关。
17.根据本发明的一种有利的改进方案,工业设施的基础地图具有关于至少一个为所述至少一个移动系统规划的行驶路径的信息,并且工业设施的修正地图具有关于至少一个为所述至少一个移动系统规划的行驶路径的信息。如果将基础地图与修正地图叠加,则将基础地图的所述至少一个规划的行驶路径的至少一个参数转用到修正地图的相应的规划
的行驶路径上。通过在基础地图的拓扑特征和修正地图的相应的拓扑特征之间的相似性,识别出在基础地图中的哪条行驶路径相当于在修正地图中的哪条行驶路径。
18.由此实现,相对快速地将与地点相关的参数、尤其是行驶路径的参数转用到修正地图中。尤其是,与手动地通过员工调整基础地图(这是相对费时的)相比,显著更快速地进行基础地图的修正。
19.规划的行驶路径的参数例如为速度、移动系统需要在左侧或右侧与对象保持的距离、允许驶过该行驶路径的移动系统的类型、适用于该行驶路径的时间限制、尤其是在确定的时间或在确定的工作日在该行驶路径上的行驶禁令。
20.根据本发明的一种优选的设计方案,分别以图形的形式生成基础地图和修正地图,该图形描述了在工业设施中的至少一个可行驶的区域。在此,作为拓扑特征,该图形包括至少一个第一节点、第二节点、以及至少一个在第一节点和第二节点之间的连接。即,该节点以及连接表示拓扑特征。在此,在两个节点之间的图形的连接分别具有连接方向和连接长度。
21.紧接着,将基础地图的图形与修正地图的图形叠加。例如从作者l.p.cordella、p.foggia、c.sansone、m.vento的文献“an improved algorithm for matching large graphs”中以及从作者luigi p.cordella、pasquale foggia、carlo sansone和mario vento的文献“a(sub)graph isomorphism algorithm for matching large graphs”(ieee期刊transactions on pattern analysis and machine intelligence),2004年10月第26期,第10篇)中已知用于叠加图形的合适方法。通过将基础地图的图形与修正地图的这种叠加,得到修正地图的图形的节点与基础地图的图形的节点的关联/对应关系。在此,基础地图的图形例如是修正地图的子图形。由此,可相应地将该方法用于将基础地图的图形与修正地图的子图形相叠加。根据这种关联,可由修正地图的相应的拓扑特征替代基础地图的拓扑特征,尤其是节点和连接。同样,根据该关联,可将基础地图的与地点相关的参数以及特征转移到修正地图的相应的部位和规划的行驶路径上。
22.根据本发明的一种有利的设计方案,在将基础地图的图形与修正地图的图形叠加时,使用在相应的节点之间的连接长度和连接方向的差别。由此,在将基础地图的图形与修正地图的图形叠加时有利地改善了精度。尤其是,当基础地图和修正地图具有不同的定向,即,相对于彼此旋转时,也实现叠加。由此,该方法具有旋转不变性并且由此更稳健。
23.根据本发明的一种有利的设计方案,该方法包括如下所述步骤:
24.首先以初始网格单元地图的形式测绘修正地图和/或基础地图。此时,初始网格单元地图在纵向上和与纵向成直角的横向上延伸。在此,纵向和横向限定一二维的笛卡尔坐标系。初始网格单元地图具有多个单个单元格。将描述至少一个可行驶的区域的单元格标记成空置的,并且将描述至少一个禁止区域的相应单元格标记成被占用。因此,空置单元格形成至少一个空置区域,并且被占用的单元格形成至少一个被占用的区域。
25.由初始网格单元地图生成缩减的网格单元地图,其方式为,将初始网格单元地图的所述至少一个空置区域的如下单元格标记成被占用,即,该单元格在纵向和/或横向上与所述至少一个被占用的区域的至少一个单元格的距离和/或直线距离小于安全距离。在此,可根据预设的标准选择安全距离。尤其是,在选择安全距离时考虑移动系统的宽度。
26.紧接着,使缩减的网格单元地图的所述至少一个空置区域稀疏化/变少/缩减,其
方式为,将至少一个空置区域的在纵向和/或横向上邻接至少一个被占用区域的单元格标记成被占用,直至至少一个空置区域呈骨架的形式,该骨架包括各个空置单元格的至少一个线状串连/串列(aneinanderreihung)。用于区域缩减的方法例如从作者t.y.zhang和c.y.suen的文献“a fast parallel algorithm for thinning digital patterns”(communications of the acm,1984年3月,第27卷,第3篇)中已知。
27.紧接着,由如此获得的至少一个空置区域的骨架生成修正地图的图形和/或基础地图的图形。
28.备选地可设想,同样以图形的形式生产工业设施的基础地图。同样可设想,以不同的形式绘制基础地图并且从中形成基础地图的图形。
29.根据本发明的一种有利的改进方案,在生成修正地图的和/或基础地图的图形之前,进行至少一个空置区域的骨架的平滑/平整,其方式为,将至少一个被占用的区域的在纵向和横向上邻接至少一个空置区域的单元格标记成空置的,直至空置区域的每个在对角方向上邻接另一空置单元格的单元格附加地还在纵向或横向上邻接又一空置单元格,该空置单元格、即所述又一空置单元格在纵向或横向上邻接所述另一空置单元格。由此,所述至少一个空置区域的骨架包括在纵向或横向上、而不仅仅在对角方向上彼此邻接的空置单元格。
30.有利地,在缩减的网格单元地图中设置至少一个用于为至少一个移动系统充电的充电点。例如,充电点为感应式充电线圈,借助于充电线圈可感应式地将能量传输给移动系统的线圈。此时,如此进行所述缩减的网格单元地图的至少一个空置区域的稀疏化,使得所述至少一个充电点是骨架的一部分。
31.根据本发明的一种有利的设计方案,图形包括至少一个充电点作为节点。即,充电点表示节点。此时,通过为充电点中的每个充电点检测与其它节点的连接,生成图形。在此,这种类型的连接包括在两个节点之间的各个空置单元格的串连。为每个检测到的连接分别确定连接方向和连接长度。
32.根据本发明的一种有利的设计方案,图形包括至少一个交叉点作为节点。即,交叉点表示节点。此时,通过将至少一个空置区域的在纵向以及横向上邻接至少三个另外的空置单元格的单元格标记成交叉点,生成图形。此外,为交叉点中的每个交叉点检测与其它节点的连接。在此,这种类型的连接包括在两个节点之间的各个空置单元格的串连。为每个检测到的连接分别确定连接方向和连接长度。
33.根据本发明的一种有利的改进方案,图形包括至少一个端点作为节点。即,端点表示节点。此时,通过将至少一个空置区域的在纵向以及横向上邻接刚好一个空置单元格的单元格标记成端点,生成图形。此外,为端点中的每个端点检测与其它节点的连接。在此,这种类型的连接包括在两个节点之间的各个空置单元格的串连。为每个检测到的连接分别确定连接方向和连接长度。
34.根据本发明的一种有利的改进方案,图形包括至少一个转弯点/拐点作为节点。即,转弯点表示节点。此时,通过将至少一个空置区域的如下单元格标记成转弯点,生成图形,所述单元格在纵向上邻接作为在纵向上最小数量的空置单元格的线状串连的一部分的、刚好一个空置单元格,并且在横向上邻接作为在横向上最小数量的空置单元格的线状串连的一部分的、刚好一个空置单元格。此外,为转弯点中的每个转弯点检测与其它节点的
连接。在此,这种类型的连接包括在两个节点之间的各个空置单元格的串连。为每个检测到的连接分别确定连接方向和连接长度。
35.可以几乎自由选择所述最小数量的值。有利地,在3个至7个之间选择空置单元格的最小数量。优选地,在4个至6个之间选择空置单元格的最小数量。尤其优选地,可将空置单元格的最小数量选择成刚好5个。
36.根据本发明的一种优选的改进方案,连接也具有连接宽度。在此,通过以下方式生成修正地图和/或基础地图的图形,即,除了每个检测到的连接之外,还分别确定连接宽度,其方式为,从连接的每个空置单元格的两侧分别确定在垂直于连接方向的方向上与相应最接近的禁止区域的连接距离。随后,为所述空置单元格分配路径宽度,所述路径宽度被计算成两个所确定的连接距离之和。此时,将所述连接的连接宽度确定成所述连接的所有空置单元格的最小路径宽度。
37.通过考虑连接的连接宽度可确定,该连接是否可被移动系统使用。如果在工业设施中存在多个移动系统,则可设想,移动系统具有不同的车辆宽度。也可设想,移动系统运输具有不同宽度的对象。于是,根据确定的连接宽度,该连接仅仅可被选出的移动系统使用。
38.有利地,通过为连接方向分配最接近精确的连接方向的主方向,分别为每个确定的连接确定连接方向。此时,主方向为正的纵向、负的纵向、正的横向以及负的横向。
39.根据本发明的一种有利的改进方案,至少一个移动系统包括用于无接触地接收能量的传输头部,并且工业设施具有至少一个用于感应式传输能量的充电点。在此,传输头部能与充电点感应耦合。在此,至少一个充电点布置在节点中。为此,该充电点例如包括初级线圈,借助于初级线圈可将能量感应式地且无接触地传输给移动系统的传输头部。由此,当移动系统位于该节点上期间,可为移动系统的蓄能器充电。
40.根据本发明的另一有利的改进方案,至少一个移动系统包括用于无接触地接收能量的传输头部,并且工业设施具有至少一个用于感应式传输能量的导体回路。在此,传输头部能与导体回路感应耦合。在此,至少一个导体回路沿着在两个节点之间的连接布置。此外,该导体回路例如包括长条形延伸的初级导体,借助于初级导体可将能量感应式地且无接触地传输给移动系统的传输头部。由此,当移动系统位于在节点之间的连接上期间,可为移动系统的蓄能器充电。
41.本发明不限制在所述权利要求的特征组合上。对于本领域技术人员来说,尤其是可从目标设置和/或与现有技术相比提出的目标中,得到权利要求和/或单个权利要求特征和/或说明书和/或附图的特征的其它合理的组合方案。
附图说明
42.现在根据附图详细解释本发明。本发明不限制在图中示出的实施例上。附图仅仅示意性地示出本发明的主题。其中:
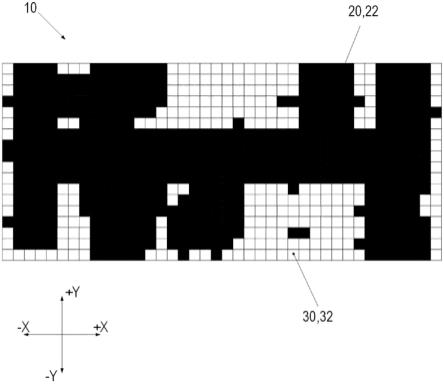
43.图1示出了以初始网格单元地图形式的工业设施的修正地图,
44.图2示出了以缩减的网格单元地图形式的图1的修正地图,
45.图3示出了具有骨架的图2的修正地图,
46.图4示出了在平滑之前的骨架的局部,
47.图5示出了在平滑之后的图4的骨架的局部,
48.图6示出了具有转弯点的骨架局部,
49.图7示出了另一工业设施的具有骨架的修正地图,
50.图8示出了图7的修正地图的图形的一部分,以及
51.图9示出了用于确定连接参数的图示。
具体实施方式
52.图1示出了工业设施的以初始网格单元地图10的形式的修正地图。初始网格单元地图10构造成二维的并且在正的纵向+x、与正的纵向反向平行的负的纵向-x、与正的纵向垂直的正的横向+y和与正的横向反向平行的负的横向-y中延伸。正的纵向+x和负的纵向-x也统称为纵向x。正的横向+y和负的横向-y也统称为横向y。纵向x和横向y由此定义二维的笛卡尔坐标系。
53.工业设施涉及工业应用、例如制造工厂。工业设施的移动系统为自动行驶的车辆。该移动系统尤其是用于在工业设施之内运输物件。工业设施具有移动系统可行驶的区域20,例如空闲的场地和路径。工业设施也具有对于移动系统禁止的区域30,例如装配工位、工作台等。
54.初始网格单元地图10具有多个单个单元格,这些单元格并排布置在纵向x以及横向y上。将描述移动系统可行驶的区域20的单元格标记为空置的。将描述对于移动系统禁止的区域30的单元格标记为被占用的。在此,空置单元格形成空置区域22,并且被占用的单元格形成被占用的区域32。
55.图2示出了图1中的以缩减的网格单元地图12的形式的修正地图。通过将确定的空置单元格标记成被占用,由初始网格单元地图10产生缩减的网格单元地图12。尤其是,将空置的区域22的如下单元格标记成被占用,即,该单元格在纵向x和/或横向y上与被占用的区域32的至少一个单元格的距离小于安全距离。备选地,当空置区域22的单元格与被占用的区域的直线距离形式的距离小于安全距离时,将空置区域的该单元格标记成被占用。此时,可自由选择安全距离。在选择安全距离时,应考虑移动系统与禁止区域30的对象之间所需的间距以及移动系统的宽度。
56.图3示出了图2中的具有空置区域22骨架24的修正地图。通过从缩减的网格单元地图12出发使空置区域22稀疏化,得到空置区域22的骨架24。此时,将空置区域22的在纵向x和/或横向y上邻接被占用的区域32的单元格标记成被占用。一直进行该过程,直至空置区域22呈骨架24的形式。在此,骨架24仅仅还包括各个空置单元格的窄的、尤其是线状的串连。
57.图4示出了在平滑之前空置区域22的骨架24局部。骨架24具有如下空置单元格,即,该空置单元格仅仅在对角方向上邻接其它单元格、但不在纵向x也不在横向y上邻接其它的空置单元格。因此,通过以下方式进行骨架24的平滑化,即,将被占用的区域32的在纵向x和横向y上邻接空置区域22的被占用的单元格标记成空置的,直至空置区域22的每个在对角方向上邻接另一空置单元格的空置单元格附加地在纵向x或横向y上也邻接又一空置单元格,该又一空置单元格在纵向x或横向y上邻接所述另一空置单元格。图5示出了在平滑之后的图4中的骨架局部。
58.图6示出了具有转弯点43的空置区域22的骨架24局部。转弯点43在负的纵向-x上邻接空置区域22的一空置单元格并且在正的纵向+x上邻接被占用的区域32的一被占用的单元格。即,转弯点43在纵向x上邻接刚好一个空置单元格,其中,所述空置单元格是在纵向x上最小数量的空置单元格的线状串连的一部分。转弯点43也在负的横向-y上邻接空置区域22的一空置单元格并且在正的横向+y上邻接被占用的区域32的一被占用的单元格。即,转弯点43在横向y上邻接刚好一个空置单元格,其中,所述空置单元格是在横向y上最小数量的空置单元格的线状串连的一部分。在此,选择5个单元格的数量作为在纵向x或者在横向y上的最小数量的空置单元格的值。
59.图7示出了图3中的具有空置区域22的骨架24的修正地图。在此,骨架24具有多个交叉点41和多个端点42。然而,骨架24没有转弯点43。交叉点41是空置区域22的在纵向x以及横向y上邻接空置区域22的3个或4个另外的空置单元格的单元格。端点42是空置区域22的在纵向x以及横向y上邻接空置区域22的刚好一个空置单元格的单元格。
60.所有交叉点41、所有端点42以及——如果存在的话——所有转弯点43都是待生成的修正地图的图形节点。在此示出的骨架24包括第一节点1、第二节点2、第三节点3、第四节点4、第五节点5、第六节点6、第七节点7、第八节点8和第九节点9。在此,第八节点8和第九节点9是端点42,剩下的节点1、2、3、4、5、6、7是交叉点41。
61.现在,对于每个节点1、2、3、4、5、6、7、8、9,即对于每个交叉点41、对于每个端点42以及——如果存在的话——对于每个转弯点43,检测与其它节点1、2、3、4、5、6、7、8、9的连接v。在此,这种连接v包括在每两个节点1、2、3、4、5、6、7、8、9之间的各个空置单元格的串连。每个连接v都具有连接方向r、连接长度l和连接宽度b。
62.在此,所有邻接相应的节点1、2、3、4、5、6、7、8、9的各个空置单元格的串连一直持续,直至到达端点42、到达转弯点43、或者到达修正地图的边缘。在此,在转弯点43上发生显著的方向变化。当随后在相同的方向上进行最小数量的空置单元格的线状串连时,该方向变化视为显著的。在达到不显著的方向变化时,各个空置单元格的串连继续进行。
63.如果在各个空置单元格的串连持续过程中到达交叉点41,则首先检测与该交叉点41的连接v。紧接着,如果可能的话,从所述交叉点41开始各个空置单元格的串连在相同的方向上继续进行,直至到达下一个节点1、2、3、4、5、6、7、8、9,并且检测与该交叉点41的连接v。由此,所有能在没有显著的方向变化的情况下从一个节点1、2、3、4、5、6、7、8、9到达的、即也能穿过另外的交叉点41到达的节点1、2、3、4、5、6、7、8、9也具有与所述一个节点1、2、3、4、5、6、7、8、9的连接v。
64.为每个分别在两个节点1、2、3、4、5、6、7、8、9之间检测到的连接v分别确定连接方向r、连接长度l和连接宽度b。即确定,当前检查的节点1、2、3、4、5、6、7、8、9与哪个节点1、2、3、4、5、6、7、8、9具有连接v,并且该连接v具有相应怎样的连接方向r、怎样的连接长度l以及怎样的连接宽度b。
65.从节点1、2、3、4、5、6、7、8、9和所确定的空置区域22的骨架24的连接v中,创建修正地图的图形。图8示出了图7中所创建的修正地图的图形的一部分。为了更加清楚,在此处示出的图形中仅仅示出了属于第三节点3的连接v。
66.在此,第三节点3具有与第一节点1、第四节点4、第五节点5、第六节点6、第七节点7和第八节点8的连接v。第三节点3在此不具有与第二节点2和第九节点9的连接v。
67.图9示出了用于借助于初始网格单元地图10确定在第一节点1与第二节点2之间的连接v的连接参数的图示,即,连接方向r、连接长度l和连接宽度b。在此,在初始网格单元地图10中,第一节点1具有坐标(x1/y1),第二节点2在此具有坐标(x2/y2)。
68.例如,通过对所有沿着在第一节点1与第二节点2之间延伸的连接v的空置单元格计数,确定连接长度l。
69.于是,此时得到:l=11。
70.备选地,以在第一节点1与第二节点2之间的直线距离的形式确定连接长度l。在此,连接长度l按照如下等式计算:
[0071][0072]
于是,此时得到:l=10.05。
[0073]
如果希望连接方向r的高清晰度,则例如作为相对于正的纵向+x的角度获得连接方向r。此时,连接方向r按照如下等式计算:
[0074][0075]
于是,此时得到:r=-5.7
°
。
[0076]
如果希望连接方向r的低清晰度,则例如为连接方向r分配最接近精确的连接方向r的主方向,即,正的纵向+x、负的纵向-x、、正的横向+y或负的横向-y。
[0077]
于是,此时得到:r=+x。
[0078]
为了确定连接宽度b,例如确定连接v的每个空置单元格在垂直于连接方向r的方向上与最靠近的禁止区域30的第一连接距离d1,以及在垂直于连接方向r的相反方向上与最靠近的禁止区域30的第二连接距离d2。为所述空置单元格分配如下的路径宽度,该路径宽度计算成两个所确定的连接距离d1、d2之和。将连接v的所有空置单元格的最小路径宽度确定成连接宽度b。
[0079]
于是,此时得到:b=5。
[0080]
附图标记列表
[0081]1ꢀꢀꢀ
第一节点
[0082]2ꢀꢀꢀ
第二节点
[0083]3ꢀꢀꢀ
第三节点
[0084]4ꢀꢀꢀ
第四节点
[0085]5ꢀꢀꢀ
第五节点
[0086]6ꢀꢀꢀ
第六节点
[0087]7ꢀꢀꢀ
第七节点
[0088]8ꢀꢀꢀ
第八节点
[0089]9ꢀꢀꢀ
第九节点
[0090]
10
ꢀꢀ
初始网格单元地图
[0091]
12
ꢀꢀ
缩减的网格单元地图
[0092]
20
ꢀꢀ
可行驶的区域
[0093]
22
ꢀꢀ
空置区域
[0094]
24
ꢀꢀ
骨架
[0095]
30
ꢀꢀ
禁止区域
[0096]
32
ꢀꢀ
被占用的区域
[0097]
41
ꢀꢀ
交叉点
[0098]
42
ꢀꢀ
端点
[0099]
43
ꢀꢀ
转弯点
[0100]vꢀꢀꢀ
连接
[0101]rꢀꢀꢀ
连接方向
[0102]
l
ꢀꢀꢀ
连接长度
[0103]bꢀꢀꢀ
连接宽度
[0104]
d1
ꢀꢀ
第一连接距离
[0105]
d2
ꢀꢀ
第二连接距离
[0106]
x
ꢀꢀꢀ
纵向
[0107]
+x
ꢀꢀ
正的纵向
[0108]-x
ꢀꢀ
负的纵向
[0109]yꢀꢀꢀ
横向
[0110]
+y
ꢀꢀ
正的横向
[0111]-y
ꢀꢀ
负的横向
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1