无人运载器和用于第一无人运载器以避免与第二无人运载器冲突的方法与流程
1.本公开涉及用于无人运载器(uv)的去中心化式移动规划。具体地,示例涉及uv和用于第一uv以避免与第二uv冲突的方法。
背景技术:
2.在同一空域中航行的诸如无人飞行器(uav)之类的uv至少需要用于避免碰撞的基本技术,以避免运载器和货物的损失。具体地,期望在早期阶段而不是在危急情况即将发生时避免危急情况。
3.在集中式飞行规划中,无人交通管理(utm)服务器通信地耦接到uav并且控制uav的飞行计划。然而,如果uav不能与utm服务器通信(例如,由于utm处或服务器处的故障),utm服务器不能解决与另一uav的紧急情况。即使在uav能够与utm服务器通信的情况下,如果uav已经非常接近另一个uav,等待utm的应答也可能不是最好的解决方案。
4.因此,可能需要改进uv协调以避免碰撞。
技术实现要素:
5.通过根据独立权利要求的装置和方法来满足该需求。有利的实施方式由从属权利要求提出。
6.根据第一方面,本公开提供了一种用于第一uv以避免与第二uv冲突的方法。该方法包括:基于第一uv的当前移动计划和从第二uv接收的第二uv的当前移动计划,确定是否可能发生与第二uv的冲突。如果确定可能发生与第二uv的冲突,则该方法还包括执行以下步骤的至少一次迭代:a)确定第一uv的候选移动计划,并且从第二uv接收第二uv的候选移动计划;b)使用第一成本函数,确定针对第一uv的当前移动计划和候选移动计划之一与第二uv的当前移动计划和候选移动计划之一的不同组合的第一成本值;c)从第二uv接收针对该不同组合的第二成本值,其中,第二成本值由第二uv使用第二成本函数计算;d)组合第一成本值和第二成本值,以便确定针对该不同组合的第三成本值;以及e)将第一uv的当前移动计划更新为在该不同组合中表现出最佳的第三成本值的组合中包括的第一uv的移动计划。
7.根据第二方面,本公开提供了一种能够避免与另一uv冲突的uv。uv包括推进系统和电路,电路被配置为基于uv的当前移动计划和从另一uv接收的另一uv的当前移动计划来确定是否可能发生与另一uv的冲突。如果确定可能发生与另一uv的冲突,则该电路还被配置为执行以下步骤的至少一次迭代:a)确定uv的候选移动计划,并从另一uv接收另一uv的候选移动计划;b)使用第一成本函数确定针对uv的当前移动计划和候选移动计划之一与另一uv的当前移动计划和候选移动计划之一的不同组合的第一成本值;c)从另一uv接收针对该不同组合的第二成本值,其中第二成本值由另一uv使用第二成本函数计算;d)组合第一成本值和第二成本值,以便确定针对该不同组合的第三成本值;以及e)将uv的当前移动计
划更新为在该不同组合中表现出最佳的第三成本值的组合中包括的uv的移动计划。
8.本公开的各方面可以实现uv的去中心化式移动规划,以便实现通过所涉及的uv之间的直接通信而无需utm服务器的冲突解决方案。
附图说明
9.下面将仅通过示例的方式并参考附图来描述装置和/或方法的示例,其中
10.图1示出了用于第一uv避免与第二uv冲突的方法的示例的流程图;
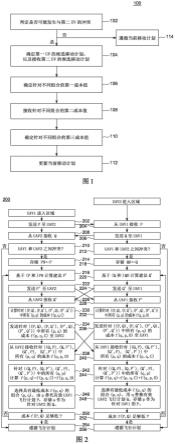
11.图2示出了飞行计划的去中心化协商的示例的流程图;以及
12.图3至图9示出了示例性飞行场景。
具体实施方式
13.因此,虽然进一步的示例能够具有各种修改和替换形式,但是其一些特定示例在附图中示出并且随后将详细描述。然而,这种详细描述并不限制进一步的示例为所描述的特定形式。进一步的示例可以覆盖落入本公开的范围内的所有修改、等同和替代。在附图的整个描述中,相同或相似的数字表示相同或相似的元件,当彼此比较时,它们可以相同或以修改的形式实现,同时提供相同或相似的功能。
14.应当理解,当元件被称为“连接”或“耦接”到另一元件时,这些元件可以经由一个或多个中间元件直接连接或耦接。如果两个元素a和b使用“或”组合,如果没有另外明确地或隐含地定义,则这将被理解为公开了所有可能的组合,即仅a、仅b以及a和b。相同组合的替代措辞是“a和b中至少一个”或“a和/或b”。这同样适用于两个以上元素的组合,加以必要的修改。
15.本文中为了描述特定实例而使用的术语并不旨在限制其它实例。无论何时使用单数形式,例如“一”、“一个”和“该”,并且仅使用单个元素既不明确也不隐含地定义为强制性的,进一步的示例也可以使用多个元素来实现相同的功能。同样,当功能随后被描述为使用多个元件来实现时,其他示例可以使用单个元件或处理实体来实现相同的功能。还应当理解,术语“由
……
组成”、“构成”、“包含”和/或“包括”在使用时指定所述特征、整数、步骤、操作、过程、动作、元件和/或组件的存在,但不排除一个或多个其它特征、整数、步骤、操作、过程、动作、元件、组件和/或其任何组合的存在或添加。
16.除非另外定义,否则本文中使用的所有术语(包括技术和科学术语)均具有实施方式所属领域的普通含义。
17.图1示出了用于第一uv避免与第二uv冲突的方法100的流程图。第一uv和第二uv可以是任何类型的运载器。例如,第一uv和第二uv可以是uav(例如,无人机)、无人地面运载器(ugv;例如,自主汽车)或无人水面船舶(usv;例如,自主船或艇)。冲突是第一uv与第二uv之间的一种严重情况,例如碰撞或以uv之间的小距离经过。uv之间的冲突可能导致uv和/或由uv运输的货物的损失或损坏。为了在早期阶段(即,在危急情况迫近前)已经避免这种危急情况,可以使用方法100。
18.方法100包括基于第一uv的当前移动计划和从第二uv接收的第二uv的当前移动计划来确定102是否可能发生第一uv与第二uv的冲突。第一uv的当前移动计划包括关于为第一uv的移动预留的空间区域的时间进程的信息。类似地,第二uv的当前移动计划包括关于
为第二uv的移动预留的空间区域的时间进程的信息。换而言之,uv的移动计划描述了时间—空间区域,是当uv在区(区域,地域)中航行时专门为uv预留的。例如,移动计划可以包括随时间的3d(三维)或2d(二维)位置(即,轨迹),以及可选地包括为相应uv预留的周围空间的形状和大小。周围空间可以例如,覆盖uv范围和可选的货物范围,以及进一步可选的安全裕度,以补偿外部影响(例如,风)、uv的航行不确定性和/或uv的传感器不确定性(例如,位置传感器的不确定性)。
19.确定(计算)102第一uv与第二uv的冲突是否可能发生可以例如包括:确定第一uv与第二uv的碰撞或以在第一uv和第二uv之间很小距离通过是否可能。由于第一uv和第二uv的移动计划每个都包括关于为相应uv的移动预留的空间区域的时间进程的信息,所以可以高精度地确定第一uv和第二uv之间的冲突情形。
20.如果确定与第二uv的冲突不可能发生,则方法100包括继续114以基于第一uv的初始当前移动计划来控制第一uv的移动。例如,如果与第二uv冲突的可能性低于预定阈值水平,如果第一uv和第二uv的轨迹不指示uv的碰撞,或者如果第一uv和第二uv的轨迹指示uv以至少预定距离经过,则可以确定与第二uv的冲突不太可能发生。换而言之,如果预期与第二uv没有冲突,则第一uv继续基于第一uv的初始当前移动计划航行(行进)。
21.如果确定可能发生与第二uv的冲突,则方法100包括执行以下描述的步骤104至112的至少一次迭代,用于改写移动计划,以便避免与第二uv的冲突。
22.方法100包括确定104第一uv的候选移动计划,以及从第二uv接收第二uv的候选移动计划。第一uv的候选移动计划和第二uv的候选移动计划是用于避免第一uv和第二uv之间的冲突的更新的移动计划。例如,可以基于第一uv的当前移动计划或在步骤104至步骤112的先前迭代中确定的一个或多个候选移动计划来确定第一uv的候选移动计划。
23.此外,方法100包括使用第一成本函数来确定106针对第一uv的当前移动计划和候选移动计划之一与第二uv的当前移动计划和候选移动计划之一的不同组合的第一成本值。例如,可以针对以下组合来确定第一成本值:第一uv的当前移动计划与第二uv的候选移动计划的组合、第一uv的候选移动计划与第二uv的当前移动计划的组合、第一uv的候选移动计划与第二uv的候选移动计划的组合、第一uv的当前移动计划与第二uv的当前移动计划的组合。
24.第一成本函数是预测当遵循第一uv的当前移动计划和候选移动计划之一时第一uv的成本并且还考虑第二uv的潜在移动计划的函数。
25.第一成本函数可以包括用于考虑可能由移动计划引起的不同成本的各种项。例如,第一成本函数可以包含与第一uv的能量消耗相关的成本的至少一项、与第一uv延迟到达目的地相关的成本的至少一项、与第一uv的损失风险相关的成本的至少一项、与由第一uv运输的货物的损失风险相关的成本的至少一项和/或与第一uv的行程的优先级相关的至少一项。在其他示例中,第一成本函数可以包括更少、更多或不同的项。
26.为了确定第一成本值,第一成本函数考虑第一uv的一个或多个属性,例如,第一uv可用的剩余能量、第一uv和/或由第一uv运输的货物的重量、第一uv的目的地、第一uv的容量、或第一uv的当前配置。换而言之,第一成本函数用于从第一uv的角度确定针对移动计划的不同组合的成本。
27.方法100还包括从第二uv接收108针对该不同组合的第二成本值。第二成本值由第
二uv使用第二成本函数来计算。第二成本函数考虑第二uv的属性,类似于以上针对第一成本函数所描述的。换而言之,第二成本函数用于从第二uv的角度确定针对移动计划的不同组合的成本。
28.此外,方法100包括组合第一成本值和第二成本值,以便确定针对该不同组合的第三成本值。由于第一成本值是基于第一uv的角度确定的,并且由于第二成本值是基于第二uv的角度确定的,所以将它们组合到第三成本值可以允许以公平的方式估算(评估)移动计划的不同组合,因为考虑了两个uv的角度。换而言之,可以考虑所涉及的两个uv的优先级、目标、容量等。例如,可以将第一成本值和第二成本值相加,并且可选地在相加之前对其进行加权。
29.方法100包括将第一uv的当前移动计划更新112为在该不同组合中表现最佳的第三成本值的组合中所包括的第一uv的移动计划。也就是说,将第一uv的当前移动计划更新为第一uv的当前移动计划和包括在表现最佳的第三成本值的组合中的第一uv的候选移动计划中的一个。换而言之,如果第一uv的当前移动计划是包括在该不同组合中表现出最佳的第三成本值的组合中,则第一uv的当前移动计划保持原样,或者,如果第一uv的候选移动计划是包括在该不同组合中表现出最佳的第三成本值的组合中,则将第一uv的当前移动计划与该候选移动计划交换。因此,第一uv可以避免与第二uv的冲突,并且使用导致最低成本的移动计划来继续移动(行进)。
30.方法100可以允许避免第一uv和第二uv之间的冲突(例如,碰撞或危急情况)。此外,方法100可以允许冲突避免在时间上提前很多,即,在危急情况发生之前。方法100通过考虑所涉及的两个uv的优先级、目标、容量等可以允许解决第一uv和第二uv之间的潜在冲突。此外,方法100可以允许以去中心化的方式解决第一uv和第二uv之间的潜在冲突,即,仅涉及受影响的uv,而不需要附加的地面站。
31.为了最小化总成本,方法100可以可选地还包括确定在步骤104至112的最近(最新)迭代中表现出最佳的第三成本值的组合的第三成本值是否满足预定质量标准。换而言之,确定在最新迭代的步骤112中选择的移动计划的组合的成本是否已经足够低。如果在最近的迭代中表现出最佳的第三成本值的组合的第三成本值不满足预定质量标准,则方法100包括执行上述步骤104至112的另一次迭代。另一方面,如果在最近的迭代中表现出最佳的第三成本值的组合的第三成本值满足第一预定质量标准,则方法100包括基于在最近的迭代中确定的更新的当前移动计划来控制第一uv的移动。因此,用于解决第一uv和第二uv之间的潜在冲突的总成本可以迭代地减少,直到成本足够低。因此,具有高成本的移动计划可被拒绝。
32.第二uv可以执行与上述步骤102至114等效的步骤。为了向第二uv提供所需的信息,方法100可以可选地包括以下各项的一项或多项:将第一uv的当前移动计划发送到第二uv、将第一uv的候选移动计划发送到第二uv、以及将针对该不同组合的第一成本值发送到第二uv。
33.尽管上面参考方法100描述了所提出的用于两个uv之间的冲突解决方案的技术的一些要素,但是下面参考图2描述了用于解决第一uv和第二uv之间的冲突的方法200的更详细的示例。在图2的示例中,假设第一uv和第二uv是uav。然而,方法200可以类似地用于自主地遵循个体移动计划的其它运载器,例如ugv或usv。
34.在图2的示例中,假设任何进入特定区(地域、区域)的uav都能够与该区域中的其他uav通信,可能通过中继。此外,每个uav能够遵循飞行计划,该飞行计划可能在飞行期间改变。此外,假设每架uav在任何时候都有有效的飞行计划。类似于上文所述的针对uv的“移动计划”,uav的飞行计划描述了相应的时间-空间区域,当相应的uav在该区域中航行(移动)时,该时间-空间区域专门为该uav预留。区域是预定义的地理区域。例如,飞行计划可包括随时间的3d位置(即,轨迹),以及可选地包括为相应uav预留的周围空间的形状和大小。周围空间可以例如,覆盖uav范围和可选的货物范围以及进一步可选的安全裕度,以便补偿外部影响(例如,风)、uav的航行不确定性和/或uav的传感器不确定性(例如,位置传感器不确定性)。
35.类似于以上针对方法100所描述的,方法200的各个步骤由飞行中的第一uav和第二uav自主地执行。
36.在两个uav进入该区域之后,它们建立用于数据交换的通信信道(例如,经由诸如无线局域网、蜂窝网络或蓝牙的无线通信技术)。
37.在建立通信信道之后,在步骤202中,第一uav将其当前飞行计划p发送到第二uav。第二uav在步骤204中接收第一uav的当前飞行计划p,并且在步骤206中将第二uav的当前飞行计划q发送到第一uav。在步骤208中,第一uav接收第二uav的当前飞行计划q。
38.在步骤210中,第一uav基于第一uav的当前飞行计划p和接收到的第二uav的当前飞行计划q判定与第二uav的冲突是否可能发生。并行地,在步骤212中,第二uav基于第二uav的当前飞行计划q和接收到的第一uav的当前飞行计划p判定与第一uav的冲突是否可能发生。
39.如果第一uav判定与第二uav的冲突不太可能发生,则在步骤254中,第一uav基于其初始当前飞行计划p继续控制其飞行(移动)。类似地,如果第二uav判定与第一uav的冲突不太可能发生,则在步骤256中,第二uav基于其初始当前飞行计划p继续控制其飞行(移动)。换而言之,第一uav和第二uav基于它们的原始飞行计划继续它们的飞行。
40.如果第一uav判定可能发生与第二uav的冲突,则第一uav在步骤214中将其初始当前飞行计划p存储为飞行计划p0,并且在步骤216中,确定(计算、算出)第一uav的至少一个候选飞行计划p’。例如,第一uav可基于其当前飞行计划p来确定候选飞行计划p’。
41.类似地,如果第二uav判定可能发生与第一uav的冲突,则第二uav在步骤218中将其初始当前飞行计划q存储为飞行计划q0,并且在步骤220中确定(计算、算出)第二uav的至少一个候选飞行计划q’。例如,第二uav可基于其当前飞行计划q来确定候选飞行计划q’。
42.换而言之,在步骤216和步骤220中确定具有降低总成本的可能性的一个或多个新的建议飞行计划。
43.随后,在步骤222至步骤228中,在第一uav和第二uav之间交换候选飞行计划p’和q’。在步骤222中,第一uav将其候选飞行计划p’发送给第二uav。类似地,在步骤224中,第二uav将其候选飞行计划q’发送给第一uav。在步骤226中,第一uav接收第二uav的候选飞行计划q’,并且,在步骤228中,第二uav接收第一uav的候选飞行计划p’。
44.在步骤230中,第一uav使用第一成本函数f(p,q,c)来确定针对第一uav的当前飞行计划p和候选飞行计划p’中的一个与第二uav的当前飞行计划q和候选飞行计划q’中的一个的不同组合的第一成本值。第一成本函数的自变量p表示第一uav的当前飞行计划p和候
选飞行计划p’中的一个。第一成本函数的自变量q表示第二uav的当前飞行计划q和候选飞行计划q’中的一个。第一成本函数考虑了第一uav的属性c,这样第一成本值从第一uav的角度表示针对飞行计划的不同组合的成本。例如,可以针对第一uav的当前飞行计划p和候选飞行计划p’之一与第二uav的当前飞行计划q和候选飞行计划q’之一的所有可能组合确定第一成本值。
45.在步骤232中,第二uav类似地使用第二成本函数f(p,q,d)确定针对第一uav的当前飞行计划p和候选飞行计划p’中的一个与第二uav的当前飞行计划q和候选飞行计划q’中的一个的不同组合的第二成本值。与第一成本函数f(p,q,c)相比,第二成本函数f(p,q,d)考虑了第二uav的属性d而不是第一uav的属性c,使得第二成本值从第二uav的角度指示针对飞行计划的不同组合的成本。
46.uav的属性c和d可以例如包括相应uav可用的剩余能量、相应uav的重量和/或由相应uav运输的货物的重量、相应uav的目的地、相应uav的容量以及相应uav的当前配置中的一个或多个。在一些示例中,可以考虑更少、更多或不同的属性。
47.成本函数f(p,q,c)和f(p,q,d)预测在考虑另一uav的特定飞行计划q,p的情况下当遵循特定飞行计划p,q时相应uav的成本。更准确地说,成本函数f(p,q,c)和f(p,q,d)提供了从各自uav的角度来看的预测成本。区域内的任何uav都应该能够评估这样的成本函数,以便公平地解决冲突。
48.例如,第一成本函数f(p,q,c)包括以下中的至少一个:用于与第一uav的能量消耗相关的成本的至少一项;用于与第一uav的延迟到达目的地相关的成本的至少一项;用于与第一uav的损失风险相关的成本的至少一项;用于与第一uav运输的货物的损失风险相关的成本的至少一项;以及与第一uav的行程的优先级相关的至少一项。在一些示例中,可以使用更少、更多或不同的项。
49.在一些示例中,第一成本函数f(p,q,c)可以定义如下:
50.f(p,q,c)=b*(u1+u2+u3+u4)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
51.其中,b表示与第一uav的行程的优先级相关的项,u1表示与第一uav的能量消耗相关的成本项,u2表示与第一uav延迟到达初始当前飞行计划中指示的目的地相关的成本项,u3表示与第一uav的损失风险相关的成本项,u4表示与第一uav运输的货物的损失风险相关的成本项。
52.根据数学表达式(1)的第一成本函数f(p,q,c)可以允许考虑在绕行时能量增加的成本,在绕行或用于再充电的中间着陆时延迟到达增加的成本。类似地,可以考虑第一uav和/或其货物的损失。例如,如果针对飞行计划p、q的特定组合,第一uav和货物安全到达的目的地,则与第一uav和由第一uav运输的货物的损失风险相关的成本项可以指示零成本。另一方面,如果对于飞行计划p、q的特定组合由于第一uav和第二uav的坠毁而损失了第一uav和由第一uav运输的货物,则与第一uav和由第一uav运输的货物的损失风险相关的成本项可以指示非常高的成本。同样,对于飞行计划p、q的特定组合,如果第一uav和第一uav运输的货物可能因碰撞以外的其他原因(例如,因为第一uav将耗尽能量)而导致第一uav和货物的损失,与第一uav和由第一uav运输的货物的损失风险有关的成本项可能指示非常高的成本。例如,如果飞行计划p、q的特定组合导致危险情况(例如,第一uav和第二uav的近距离通过),则与第一uav和由第一uav运输的货物的损失风险相关的成本项可以指示高成本。与
第一uav的行程的优先级相关的项可以允许考虑第一uav的行程的重要性。例如,与第一uav的行程的优先级相关的项对于“正常行程”可以是一,而对于急迫行程或紧急行程可以是高。
53.第二成本函数f(p,q,d)可包括用于第二uav的等效项或类似项。一般来说,参数p、q、c和d应该是可信的。
54.随后,在步骤234至步骤240中,在第一uav和第二uav之间交换第一成本值和第二成本值。在步骤234中,第一uav将第一成本值发送给第二uav。类似地,在步骤236中,第二uav将第二成本值发送给第一uav。在步骤238中,第一uav接收第二uav的第二成本值,并且在步骤240中,第二uav接收第一uav的第一成本值。
55.在步骤242中,第一uav组合所确定的第一成本值和所接收的第二成本值,以便确定针对不同组合的第三成本值。通过将第一成本值和第二成本值组合成第三成本值,可以确定针对两个uav的总成本。例如,第一成本值和第二成本值可以如下相加:
56.f(p,q)=f(p,q,c)+f(p,q,d)
ꢀꢀꢀꢀꢀꢀ
(2)
57.在步骤244中,第二uav将所确定的第二成本值和所接收的第一成本值类似地组合成第三成本值。
58.随后,在步骤246中,第一uav确定在不同的组合中表现出最佳的第三成本值(例如,指示最低成本的成本值)的飞行计划(p,q)的组合。此外,第一uav将其当前飞行计划p更新为第一uav的飞行计划p,该第一uav的飞行计划p是包括在该不同组合中的表现出最佳的第三成本值的组合(p,q)中。例如,如果第一uav的当前飞行计划p是包括在该不同组合中的表现出最佳的第三成本值的组合中,则第一uav的当前飞行计划p保持原样。另一方面,如果第一uav的候选飞行计划p’包含在该不同组合中的表现出最佳的第三成本值的组合中,则第一uav的当前飞行计划p被更新为该候选飞行计划p’。此外,作为包括在该不同组合中的表现出最佳的第三成本值的组合(p,q)中的第二uav的飞行计划q被第一uav存储为第二uav的新的飞行计划。
59.然后,第一uav检查针对所选组合(p,q)的总成本是否足够低。因此,在步骤250中,第一uav判定在该迭代中表现最佳的第三成本值的组合(p,q)的第三成本值是否满足预定质量标准。例如,可以判定由在该迭代中表现出最佳的第三成本值的组合(p,q)的第三成本值所指示的成本是否低于预定阈值。如果在该迭代中表现出最佳的第三成本值的组合的第三成本值不满足预定质量标准,即,如果针对所选组合(p,q)的总成本太高,则第一uav执行从步骤216开始的步骤的另一迭代。如果在该迭代中表现出最佳的第三成本值的组合的第三成本值满足第一预定质量标准,则第一uav基于在步骤246的该迭代中确定的更新的当前飞行计划p来控制其飞行(移动)。
60.类似地,在步骤252中,第二uav判定在该迭代中表现出最佳的第三成本值的组合(p,q)的第三成本值是否满足预定质量标准。如果在该迭代中表现出最佳的第三成本值的组合的第三成本值不满足预定质量标准,即,如果针对所选组合(p,q)的总成本太高,则第二uav执行从步骤220开始的步骤的另一迭代。如果在该迭代中表现出最佳的第三成本值的组合的第三成本值满足第一预定质量标准,则第二uav基于在步骤248的该迭代中确定的更新的当前飞行计划q来控制其飞行(移动)。
61.从图2中可以看出,第一uav和第二uav中的每一个都实施协商方法,其与另一uav
通信并协作地改写其飞行计划p、q,使得更新的飞行计划p、q降低总成本并避免冲突。
62.在下文中,给出了关于如何在步骤216和步骤220中获得候选飞行计划p’和q’的一些更多细节。
63.确定第一uav的候选飞行计划p’的步骤216可以例如包括:基于第一uav的当前飞行计划p生成针对第一uav的候选飞行计划的建议p”。类似地,确定第二uav的候选飞行计划q’的步骤220可以例如包括:基于第二uav的当前飞行计划q生成针对第二uav的候选飞行计划的建议q”。
64.例如,如果uav的当前飞行计划p和q指示碰撞,则生成针对第一uav的候选飞行计划的建议p”的步骤216可包括:基于第一uav的当前飞行计划p和第二uav的当前飞行计划q确定第一uav和第二uav的碰撞点,以及生成针对第一uav的候选飞行计划的建议p”,使得第一uav在到达该碰撞点之前停止。生成针对第二uav的候选飞行计划的建议q”可以是等效的,即,针对第二uav的候选飞行计划的建议q”可以使得第二uav在到达由第二uav先前基于第一uav的当前飞行计划p和第二uav的当前飞行计划q确定的碰撞点之前停止。
65.可替换地,生成针对第一uav的候选飞行计划的建议p”可包括改变第一uav的当前飞行计划p的一个或多个参数。例如,第一uav的当前飞行计划p的一个或多个参数可包括第一uav的海拔、第一uav的速度和/或第一uav的移动轨迹。在其他示例中,可以改变第一uav的当前飞行计划p的更少、更多或不同的参数。例如,可在到达潜在冲突(例如,碰撞)点之前增加或减小第一uav的速度,使得第一uav更早或更晚到达潜在冲突点,以避免与第二uav冲突。可替换地或附加地,可在到达潜在冲突(例如,碰撞)点之前增加或降低第一uav的海拔(高度),使得第一uav以较高或较低的海拔到达潜在冲突点,以避免与第二uav冲突。此外,可替换地或附加地,可在到达潜在冲突(例如,碰撞)点之前改变第一uav的航线,使得第一uav和第二uav之间的最小距离在潜在冲突点处增加,以避免与第二uav冲突。
66.类似地,生成针对第二uav的候选飞行计划的建议q”可包括改变第二uav的当前飞行计划q的一个或多个参数。
67.在i》1的迭代中执行步骤216的情况下,生成针对第一uav的候选飞行计划的建议p”可进一步基于在步骤216的先前迭代中使用的用于更新第一uav的当前飞行计划p第一uav的一个或多个飞行计划。例如,初始当前飞行计划p0和在步骤216的最近迭代i-1中使用的用于更新第一uav的当前飞行计划p的第一uav的飞行计划可用于生成迭代i中的针对候选飞行计划的建议p”。类似地,生成针对第二uav的候选飞行计划的建议q”可进一步基于在步骤220的先前迭代中使用的用于更新第二uav的当前飞行计划q的第二uav的一个或多个飞行计划。
68.第一uav还可使用第一成本函数来确定针对其候选飞行计划的建议p”和第二uav的当前飞行计划q的第四成本值。换而言之,计算并存储f(p”,q,c)。
69.此外,第一uav可使用第二成本函数估计其候选飞行计划的建议p”和第二uav的当前飞行计划q的第五成本值。换而言之,估计并存储f(p”,q,d)。对于第五成本值的估计(近似),第二uav的属性d可以例如是从第二uav接收到的以使得估计可以是精确的。在其他示例中,可以假设第二uav的属性对于先前的迭代是恒定的。此外,可以重用来自先前迭代的结果,(例如,在先前迭代中接收的第二uav的当前飞行计划q和第一uav的当前飞行计划p的组合的第二成本值可被假定为针对第一uav的候选飞行计划的建议p”和第二uav的当前飞
行计划q的组合的第五成本值,即,f(p”,q,d)=f(p,q,d))。
70.第四成本值和第五成本值从第一uav和第二uav的角度估计针对候选飞行计划的建议p”和第二uav的当前飞行计划q的成本。
71.类似于以上针对第三成本值所描述的,第一uav可进一步基于第四成本值和第五成本值确定第六成本值,以便估计候选飞行计划的建议p”的总成本。例如,第四成本值和第五成本值可以相加,并且可选地在相加之前被加权。例如,第四成本值和第五成本值可以如下相加:
72.f(p",q)=f(p",q,c)+f(p",q,d)
ꢀꢀꢀꢀꢀꢀꢀ
(3)
73.如果第六成本值满足第二预定质量标准,则第一uav使用针对第一uav的候选飞行计划的建议p”作为第一uav的候选飞行计划。如果第六成本值不满足第二预定质量标准,则第一uav生成针对第一uav的候选飞行计划的另一建议。换而言之,如果建议p”满足第二预定质量标准,则建议p”被接受为第一uav的候选飞行计划。例如,第二预定质量标准可以是:第六成本值小于针对第一uav的当前飞行计划和第二uav的当前飞行计划p的第三成本值(即,f(p”,q)《f(p,q))。因此,可以确保针对第一uav的候选飞行计划的建议p”比第二uav的当前飞行计划p产生更少的总成本。
74.第二uav可执行等效处理用于估算(评估)针对第二uav的候选飞行计划的建议q”。
75.在下文中,参考图3至图9描述了根据所提出的技术的两个uav 310和uav 320之间的示例性冲突解决方案。图3示出了初始情况。uav 310和uav 320中的每一个包括推进系统311、推进系统321(例如,马达驱动的旋翼)和电路312、电路322,电路312、电路322被配置为执行所提出的用于避免与另一uav冲突的方法。电路312、电路322可以,例如包括相应数据处理电路和相应的无线通信电路。例如,处理电路可以是单个专用处理器、单个共享处理器、或多个单独的处理器(其中的一些或全部可以被共享)、数字信号处理器(dsp)硬件、专用集成电路(asic)或现场可编程门阵列(fpga)。处理电路可以可选地耦接到例如用于存储软件的只读存储器(rom)、随机存取存储器(ram)和/或非易失性存储器。
76.第一uav 310遵循当前飞行计划p=p0,并且第二uav 320遵循当前飞行计划q=q0。uav 310和uav 320确定冲突可能发生。具体地,uav 310和uav 320确定当遵循飞行计划p0和q0时碰撞是可能的。由于坠毁以及由此导致的货物和uav的损失,遵循当前飞行计划p0和q0的成本f(p0,q0)非常高。
77.uav 310和uav 320确定第一候选飞行计划p1和q1,以便避免坠毁。第一候选飞行计划p1和q1与当前飞行计划p0和q0一起在图4中示出。根据第一候选飞行计划pi,第一uav 310保持位置,然后在到达碰撞点之前降落到安全降落地点。因此,第一uav 310可避免坠毁,但不能到达其目的地。类似地,根据第一候选飞行计划q1,第二uav 320保持位置,然后在到达碰撞点之前着陆到安全着陆点。因此,第二uav 320也可以避免坠毁,但是不能到达其目的地。
78.针对飞行计划p1和q1的第三成本值(即,总成本)高,但是仍然低于针对初始飞行计划p0和q0的成本值。因此,第一uav 310和第二uav320(临时)同意p1和q1作为新的有效飞行计划p=p1和q=q1。如图5所示,第一uav 310和第二uav 320遵循商定的飞行计划p1和q1。在一些示例中,在第一次迭代中可以不考虑f(p0,q1)和f(p1,q0)作为快速避免冲突的预防措施。
79.由于飞行计划pi和ql的高总成本,开始用于确定候选飞行计划的新的迭代。换而言之,第一uav 310和第二uav 320继续改进飞行计划。
80.图6示出了当uav 310和uav 320遵循飞行计划p1和q1的同时在第二次迭代中的飞行计划生成。第一uav 310基于先前的飞行计划p0和p1创建第二候选飞行计划p2,而第二uav 320基于先前的飞行计划q0和q1创建第二候选飞行计划q2。第二候选飞行计划q2使第二uav 320在碰撞点附近暂时以较高飞行高度层(海拔)飞行。第一uav 310的第二候选飞行计划p2基本上对应于第一uav 310的原始飞行计划p0。与原始飞行计划p0的唯一区别在于第二候选飞行计划p2使第一uav 310在到达碰撞点之前降低速度。从图6可以看出,第二候选飞行计划p2和q2将不存在冲突。对于飞行计划p2和q2的组合,第一uav 310和第二uav320将到达它们各自的目的地。第一uav 310以及第二uav 320都将稍微晚到达它们各自的目的地,并且由于较长的行进时间和增加的高度而需要稍微多的能量。
81.针对飞行计划p2和q2的组合的总成本f(p2,q2)最低。因此,如图7所示,p=p2和q=q2被定义为新的有效飞行计划,使得第一uav 310遵循飞行计划p=p2,第二uav 320遵循飞行计划q=q2。由于针对飞行计划p2和q2的组合的总成本还不够低,因此需要用于更新当前飞行计划的进一步迭代。
82.图8示出了在uav 310和uav 320遵循飞行计划p2和q2的同时第三次迭代中的飞行计划生成。第一uav 310基于先前的飞行计划p0、p1和p2创建第三候选飞行计划p3,第二uav 320基于先前的飞行计划q0、q1和q2创建第三候选飞行计划q3。第三候选飞行计划q3与原始飞行计划q0相同。第一uav 310的第三候选飞行计划p3基本上对应于第一uav 310的当前飞行计划p2。换而言之,第三候选飞行计划p3使第一uav 310在到达碰撞点之前降低速度。从图6可以看出,对于第三候选飞行计划p3和q3将不存在冲突,因为第一uav 310将在到达碰撞点之前降低速度,使得第二uav 320可以在第一uav 310到达碰撞点之前通过碰撞点。
83.对于飞行计划p3和q3的组合,第一uav 310和第二uav 320将到达它们各自的目的地。只有第一uav 310会稍微晚一点到达其目的地。针对飞行计划p3和q3的组合的总成本f(p3,q3)最低。因此,如图9所示,p=p3和q=q3=q0被定义为新的有效飞行计划,使得第一uav 310遵循飞行计划p=p3,第二uav 320遵循飞行计划q=q3=q0。由于针对飞行计划p3和q3的组合的总成本足够低,因此不需要用于更新当前飞行计划的进一步迭代。冲突已解决。与原始冲突的飞行计划p0和q0相比,新的飞行计划p3和q3仅产生小的附加成本。
84.成本函数f(p,q,c)和f(p,q,d)可以评定导致损失uav的成本非常高的飞行计划。通过降低成本,可以避免导致冲突和碰撞的飞行计划。成本函数可以定义为阻止未来与其他uav的所有危急情况。因此,冲突可被早期检测到并被及时解决。成本函数可以允许以非常描述性的方式对特定飞行计划的缺点进行建模。上述示例包括优先级、能耗和延迟到达的成本。所提出的协商方法旨在迭代地降低总成本。增加成本的飞行计划被拒绝。协商由两个相关uav完成,不需要中心站。因此,它是去中心化的。
85.如上所述,以上结合图2至图9所述的技术不限于遵循飞行计划的uav。该技术可以类似地用于自主地遵循各自的移动计划的其他运载器,例如ugv或usv。
86.以下实施方式涉及进一步的实施例:
87.(1)一种用于第一uv以避免与第二uv冲突的方法,该方法包括:
88.基于第一uv的当前移动计划和从第二uv接收的第二uv的当前移动计划,确定是否
可能发生与第二uv的冲突;以及
89.如果确定可能发生与第二uv的冲突,则执行以下步骤的至少一次迭代:
90.a)确定第一uv的候选移动计划,并且从第二uv接收第二uv的候选移动计划;
91.b)使用第一成本函数确定第一成本值,该第一成本值用于第一uv的当前移动计划和候选移动计划之一与第二uv的当前移动计划和候选移动计划之一的不同组合;
92.c)从第二uv接收不同组合的第二成本值,其中第二成本值由第二uv使用第二成本函数计算;
93.d)组合第一成本值和第二成本值,以便确定不同组合的第三成本值;以及
94.e)将第一uv的当前移动计划更新为在不同组合中表现出最佳的第三成本值的组合中包括的第一uv的移动计划。
95.(2)根据(1)的方法,其中,方法还包括:
96.确定在最近的迭代中表现出最佳的第三成本值的组合的第三成本值是否满足预定质量标准;以及
97.如果在最近的迭代中表现出最佳的第三成本值的组合的第三成本值不满足预定质量标准,则执行步骤a)至e)的另一迭代。
98.(3)根据(1)或(2)的方法,其中,方法还包括:
99.确定在最近的迭代中表现出最佳的第三成本值的组合的第三成本值是否满足第一预定质量标准;以及
100.如果在最近的迭代中表现出最佳的第三成本值的组合的第三成本值满足第一预定质量标准,则基于在最近的迭代中确定的更新的当前移动计划来控制第一uv的移动。
101.(4)根据(1)至(3)中任一项的方法,其中,确定第一uv的候选移动计划包括:
102.基于第一uv的当前移动计划,生成用于第一uv的候选移动计划的建议;
103.使用第一成本函数为第一uv的候选移动计划和第二uv的当前移动计划的建议确定第四成本值;
104.使用第二成本函数来估计针对第一uv的候选移动计划和第二uv的当前移动计划的建议的第五成本值;
105.基于第四成本值和第五成本值来确定第六成本值;
106.以及如果第六成本值满足第二预定质量标准,则使用用于第一uv的候选移动计划的建议作为第一uv的候选移动计划。
107.(5)根据(4)的方法,其中,确定第一uv的候选移动计划还包括:
108.如果第六成本值不满足第二预定质量标准,则生成用于第一uv的候选移动计划的另一建议。
109.(6)根据(4)或(5)的方法,其中,生成针对第一uv的候选移动计划的建议还基于在步骤e)的先前迭代中使用的第一uv的一个或多个移动计划,以更新第一uv的当前移动计划。
110.(7)根据(4)至(6)中任一项的方法,其中,生成针对第一uv的候选移动计划的建议包括改变第一uv的当前移动计划的一个或多个参数。
111.(8)根据(7)的方法,其中,第一uv的当前移动计划的一个或多个参数包括以下中的至少一个:第一uv的海拔、第一uv的速度、第一uv的移动轨迹。
112.(9)根据(4)至(6)中任一项的方法,其中,生成第一uv的候选移动计划的建议包括:
113.基于第一uv的当前移动计划和第二uv的当前移动计划来确定第一uv和第二uv的碰撞点;
114.生成用于第一uv的候选移动计划的建议,使得第一uv在到达碰撞点之前停止。
115.(10)根据(1)至(9)中任一项的方法,其中,第一成本函数包括以下中的至少一个:
116.与第一uv的能量消耗相关的成本的至少一项;
117.与第一uv目的地延迟到达相关的成本的至少一项;
118.与第一uv的损失风险相关的成本的至少一项;
119.与由第一uv运输的货物的损失风险相关的成本的至少一项;以及
120.与第一uv的行程的优先级相关的至少一项。
121.(11)根据(1)至(10)中任一项的方法,其中,第一成本函数考虑第一uv的属性。
122.(12)根据(11)的方法,其中,第一uv的属性包括以下中的至少一者:第一uv可用的剩余能量、第一uv和/或由第一uv运输的货物的重量、第一uv的目的地、第一uv的容量、以及第一uv的当前配置。
123.(13)根据(1)至(10)中任一项的方法,其中,第二成本函数考虑第二uv的属性。
124.(14)根据(1)至(13)中任一项的方法,还包括以下步骤中的一个或多个:将第一uv的当前移动计划发送到第二uv;
125.将第一uv的候选移动计划发送到第二uv;以及
126.将不同组合的第一成本值发送到第二uv。
127.(15)根据(1)至(14)中任一项的方法,还包括:
128.如果确定与第二uv的冲突不可能发生,则基于第一uv的初始当前移动计划继续控制第一uv的移动。
129.(16)根据(1)至(15)中任一项的方法,其中,第一uv和第二uv是uav。
130.(17)根据(1)至(16)中任一项的方法,其中,第一uv的当前移动计划包括关于为第一uv的移动预留的空间区域的时间进程的信息,和/或其中,第二uv的当前移动计划包括关于为第二uv的移动预留的空间区域的时间进程的信息。
131.(18)一种其上存储有程序的非暂时性机器可读介质,所述程序具有程序代码,当在处理器或可编程硬件上执行时,用于执行根据(1)至(17)中任一项的方法。
132.(19)一种程序,其具有程序代码,当在处理器或可编程硬件上执行该程序时,该程序代码用于执行根据(1)至(17)中任一项的方法。
133.(20)一种能够避免与另一uv冲突的uv,该uv包括推进系统和电路,该电路被配置为:
134.基于uv的当前移动计划和从另一uv接收的另一uv的当前移动计划,确定是否可能发生与另一uv的冲突;以及
135.如果确定可能发生与另一uv的冲突,则执行以下步骤的至少一次迭代:
136.a)确定uv的候选移动计划,并从另一uv接收另一uv的候选移动计划;
137.b)使用第一成本函数来确定第一成本值,该第一成本值用于uv的当前移动计划和候选移动计划之一与另一uv的当前移动计划和候选移动计划之一的不同组合;
138.c)从另一uv接收不同组合的第二成本值,其中第二成本值是由另一uv使用第二成本函数计算的;
139.d)组合第一成本值和第二成本值,以便确定不同组合的第三成本值;以及
140.e)将uv的当前移动计划更新为uv的移动计划,uv的移动计划包括在不同组合中表现出最佳的第三成本值的组合中。
141.(21)根据(20)的uv,其中uv是uav。
142.与一个或多个先前详细的示例和附图一起提及和描述的方面和特征也可以与一个或多个其它示例组合,以便替换其它示例的类似特征或者以便将该特征另外引入到其它示例中。
143.说明书和附图仅示出了本公开的原理。此外,本文所述的所有示例主要旨在明确地仅用于说明性目的,以帮助读者理解本公开的原理和发明人为促进本领域而贡献的概念。本文所述的本公开的原理、方面和示例以及其具体示例的所有陈述旨在涵盖其等同。
144.例如,框图可以示出实现本公开的原理的高级电路图。类似地,流程图、流程示意图、状态转换图、伪代码等可以表示各种过程、操作或步骤,其例如可以基本上表示在非暂时性机器可读介质中(例如,软盘、dvd、blu-ray、cd、rom、prom和eprom、eeprom或闪存),并且因此由处理器或可编程硬件执行,而不管是否明确示出了这种处理器或可编程硬件。在说明书或权利要求书中公开的方法可以由具有用于执行这些方法的各个动作中的每一个的装置来实现。
145.应当理解,说明书或权利要求书中公开的多个动作、过程、操作、步骤或功能的公开可以被解释为不按特定顺序,除非例如出于技术原因而明确地或隐含地另外声明。因此,多个动作或功能的公开将不会将这些动作或功能限制为特定顺序,除非这些动作或功能由于技术原因而不可互换。此外,在一些示例中,单个动作、功能、过程、操作或步骤可以分别包括或可以被分解成多个子动作、功能、过程、操作或步骤。除非明确排除,否则此类子行为可包括在本单独行为的公开内容中并作为其一部分。
146.此外,所附权利要求由此被并入具体实施方式中,其中每个权利要求可以独立地作为单独的示例。尽管每个权利要求可以独立地作为单独的示例,但是应当注意,尽管从属权利要求可以在权利要求中引用与一个或多个其他权利要求的特定组合,但是其他示例也可以包括从属权利要求与每个其他从属或独立权利要求的主题的组合。在此明确地提出了这样的组合,除非声明不打算进行特定的组合。此外,意图还包括任何其它独立权利要求的权利要求的特征,即使该权利要求不直接从属于该独立权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1