行驶车系统、以及行驶车的控制方法与流程
1.本发明涉及行驶车系统、以及行驶车的控制方法。
背景技术:
2.以往,在半导体设备的制造工厂等中,利用输送收纳有半导体晶圆或者标线片的货物的行驶车系统。行驶车系统具有在行驶路行驶的多个行驶车、和控制各行驶车的控制器。各行驶车通过无线通信等,将行驶路的自身的位置信息向控制器发送。控制器基于来自各行驶车的位置信息,决定负责货物的输送的行驶车,向所决定的行驶车发送行驶指令。
3.在行驶车系统中,在存在表示行驶路的分支的分支部的情况下,往往在分支部设定仅使一台行驶车能够进入的阻塞区域。在专利文献1中,公开了针对锁定点(相当于上述“阻塞区域”),对行驶中的台车排他地阻塞许可并且阻塞解除的技术。
4.专利文献1:日本专利第4172466号公报
5.在专利文献1中,即使在实际上没有成为通过行驶路的妨碍的状况,只要在锁定点持续存在台车(即使是台车的一部分),则不会使其它台车进入锁定点。其结果是,在现有技术中,行驶车难以高效地通过分支部。
技术实现要素:
6.本发明提供一种行驶车能够高效地通过分支部的行驶车系统、以及行驶车的控制方法。
7.本发明的实施方式的行驶车系统是具有:包含分支部的行驶路、在行驶路行驶的行驶车以及控制器的行驶车系统,在包含分支部而设定的阻塞区域内的一部分设定行驶车能够通过从分支部的上游侧向下游侧的行驶路的一方的特定区域,控制器在从行驶车接收阻塞区域的通过请求时,若在阻塞区域不存在其它行驶车,则向发出了阻塞区域的通过请求的行驶车发送阻塞区域的通过许可,行驶车在取得了阻塞区域的通过许可的情况下,进入阻塞区域,控制器在从行驶车接收特定区域的通过请求时,若在特定区域不存在其它行驶车,则向发出了特定区域的通过请求的行驶车发送特定区域的通过许可,行驶车在取得了特定区域的通过许可的情况下,进入特定区域。
8.本发明的实施方式的行驶车的控制方法是在包含分支部的行驶路行驶的行驶车的控制方法,其包含以下步骤:在包含分支部而设定的阻塞区域内的一部分设定行驶车能够通过从分支部的上游侧向下游侧的行驶路的一条行驶路的特定区域;在从行驶车收到阻塞区域的通过请求时,若在阻塞区域不存在其它行驶车,则向发出了阻塞区域的通过请求的行驶车发送阻塞区域的通过许可;在使行驶车取得了阻塞区域的通过许可的情况下,使行驶车进入阻塞区域;在从行驶车收到特定区域的通过请求时,若在特定区域不存在其它行驶车,则向发出了特定区域的通过请求的行驶车发送特定区域的通过许可;以及在使行驶车取得了特定区域的通过许可的情况下,使行驶车进入特定区域。
9.根据本发明的实施方式的行驶车系统,在包含分支部而设定的阻塞区域内的一部
分设定行驶车通过能够从分支部的上游侧向下游侧的行驶路的一条行驶路的特定区域。根据行驶车系统,关于来自行驶车的特定区域的通过请求,无论阻塞区域的阻塞的有无与否,若在特定区域不存在其它行驶车,则对发出了特定区域的通过请求的行驶车都给予特定区域的通过许可,所以行驶车能够高效地通过分支部。
10.另外,在上述实施方式的行驶车系统中,取得了阻塞区域的通过许可的行驶车,也可以在通过阻塞区域内的特定区域之后,向控制器发送特定区域的阻塞的解除请求,控制器也可以根据特定区域的阻塞的解除请求,解除特定区域的阻塞而将特定区域设定为能够通过,取得了阻塞区域的通过许可的行驶车也可以在发送特定区域的阻塞的解除请求之后并通过阻塞区域之后,向控制器发送阻塞区域的阻塞的解除请求,控制器也可以根据阻塞区域的阻塞的解除请求,解除阻塞区域的阻塞而将阻塞区域设定为能够通过。根据该实施方式,即使前方的行驶车通过特定区域之后残留在阻塞区域内,也能够进行特定区域的阻塞的解除,所以行驶车能够高效地通过分支部。
11.另外,在上述实施方式的行驶车系统中,行驶路也可以具备在分支部的近前向行驶车提供表示存在分支路的分支信息的第一点,行驶车若在没有取得阻塞区域或者特定区域的通过许可的状况下取得分支信息,则向控制器发送特定区域的通过请求,在第一点存在于阻塞区域内的情况下,阻塞区域外的行驶路具备的多个点中的、第一点的近前且更接近第一点的第二点也可以被设定为能够向行驶车提供分支信息。根据该实施方式,能够在阻塞区域外取得分支信息,所以能够适当地控制阻塞区域或者特定区域的通过请求。
12.另外,在上述实施方式的行驶车系统中,行驶车也可以基于在行驶路中相邻的点间亦即行进段而行驶,在第二点被设定为能够提供分支信息的状况下而取得了特定区域的通过许可的情况下,也可以基于从第二点到行驶路的一条行驶路的点的虚拟段而行驶。根据该实施方式,在没有取得阻塞区域的通过许可的状态下而行驶到阻塞区域的近前的行驶车,能够切换行驶路径而进行基于虚拟段的行驶,所以能够抑制阻塞区域的近前的多个行驶车的滞留。
13.另外,在上述实施方式的行驶车系统中,虚拟段也可以被预先制作并保持在行驶车或者控制器,在行驶车取得了特定区域的通过许可的情况下取出,或者从控制器取得而使用。根据该实施方式,将取得特定区域的通过许可时所需的虚拟段保持在行驶车或者控制器,所以行驶车能够高效地通过分支部。另外,在上述实施方式的行驶车系统中,行驶路的另一条行驶路的目的地也可以是终点,第一点也可以是进入行驶路的另一条行驶路后,后退的行驶车将行进方向切换为行驶路的一条行驶路的切换点。根据该实施方式即使在分支部的目的地存在终点的系统中,行驶车也能够高效地通过分支部。另外,在上述实施方式的行驶车系统中,行驶车也可以在向控制器发送阻塞区域的通过请求之后,在没有取得阻塞区域的通过许可的情况下,向控制器发送特定区域的通过请求。根据该实施方式,能够减少行驶车无法进入阻塞区域的状况,所以能够抑制阻塞区域的近前的多个行驶车的滞留。另外,在上述实施方式的行驶车系统中,行驶车也可以在向控制器发送阻塞区域的通过请求之后,在没有取得阻塞区域的通过许可的情况下,在行驶车的停止中向控制器发送特定区域的通过请求。根据该实施方式,能够减少无法取得阻塞区域的通过许可而在阻塞区域的近前停车的行驶车的数量,所以能够抑制阻塞区域的近前的多个行驶车的滞留。
附图说明
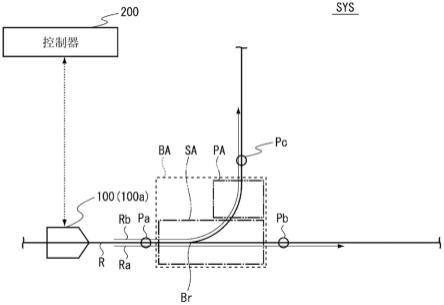
14.图1是表示第一实施方式的行驶车系统的一个例子的图。
15.图2是表示第一实施方式的行驶车的一个例子的图。
16.图3是表示第一实施方式的行驶车以及控制器的结构例的框图。
17.图4是表示第一实施方式的控制器存储的状态信息的例子的图。
18.图5是表示第一实施方式的进入特定区域的行驶车的处理的流程的例子的流程图。
19.图6是表示第一实施方式的进入阻塞区域或者特定区域的行驶车的处理的流程的例子的流程图。
20.图7是表示第一实施方式的向阻塞区域进入的行驶车的例子的图。
21.图8是表示第一实施方式的向阻塞区域进入的行驶车的例子的图。
22.图9是表示第一实施方式的向特定区域进入的行驶车的例子的图。
23.图10是表示第一实施方式的向特定区域进入的行驶车的例子的图。
24.图11是表示第一实施方式的向特定区域进入的行驶车的例子的图。
25.图12是表示第一实施方式的执行阻塞区域的通过许可的设定处理的控制器的处理的流程的例子的流程图。
26.图13是表示第一实施方式的执行特定区域的通过许可的设定处理的控制器的处理的流程的例子的流程图。
27.图14是表示第一实施方式的特定区域的通过中的行驶车的处理的流程的例子的流程图。
28.图15是表示第一实施方式的通过特定区域的行驶车的例子的图。
29.图16是表示第一实施方式的阻塞区域的通过中的行驶车的处理的流程的例子的流程图。
30.图17是表示第一实施方式的通过阻塞区域的行驶车的例子的图。
31.图18是表示第一实施方式的通过阻塞区域的行驶车的例子的图。
32.图19是表示第一实施方式的执行特定区域的阻塞的解除设定处理的控制器的处理的流程的例子的流程图。
33.图20是表示第一实施方式的执行阻塞区域的阻塞的解除设定处理的控制器的处理的流程的例子的流程图。
34.图21是表示第二实施方式的行驶车系统的一个例子的图。
35.图22是表示第二实施方式的行驶车以及控制器的结构例的框图。
36.图23是表示第二实施方式的进入阻塞区域或者特定区域的行驶车的处理的流程的例子的流程图。
37.图24是表示第二实施方式的向特定区域进入的行驶车的例子的图。
38.图25是表示第二实施方式的向特定区域进入的行驶车的例子的图。
39.图26是表示第二实施方式的向特定区域进入的行驶车的例子的图。
40.图27是表示第二实施方式的特定区域的通过中的行驶车的处理的流程的例子的流程图。
41.图28是表示第二实施方式的通过特定区域的行驶车的例子的图。
42.图29是表示第二实施方式的通过阻塞区域的行驶车的例子的图。
43.图30是表示第二实施方式的通过阻塞区域的行驶车的例子的图。
44.图31是表示第二实施方式的通过阻塞区域的行驶车的例子的图。
45.图32是表示第二实施方式的通过阻塞区域的行驶车的例子的图。
46.图33是表示通过转向而通过阻塞区域的行驶车的例子的图。
47.图34是表示通过转向而通过阻塞区域的行驶车的例子的图。
48.图35是表示通过转向而通过阻塞区域的行驶车的例子的图。
49.图36是表示通过转向而通过阻塞区域的行驶车的例子的图。
具体实施方式
50.以下,参照附图来说明实施方式。此外,本发明并不限于以下说明的形态。另外,在附图中,为了说明实施方式,有时放大、缩小以及强调地记载一部分等、适当地改变并表现比例尺。在附图中,有时使用xyz正交坐标系来说明图中的方向。在xyz正交坐标系中,将铅垂方向设为z方向,将水平方向设为x方向、y方向。另外,在各方向(例如、x方向)上,将箭头的朝向称为+侧(例如、+x侧),将与箭头的朝向相反的一侧称为-侧(例如、-x侧)。
51.[第一实施方式]
[0052]
图1是表示第一实施方式的行驶车系统的一个例子的图。行驶车系统sys具有:包含分支部br的行驶路r、在行驶路r行驶的行驶车100、以及控制器200。行驶车系统sys例如是设置在半导体设备的制造工厂等的输送系统,输送收纳有用于半导体设备的制造的半导体晶圆的foup(front-opening unified pod:前开式联合吊舱)或者收纳有标线片等加工用部件的标线片容器等容器。
[0053]
行驶车系统sys具有多个行驶车100。行驶车100例如是高架行驶车。在第一实施方式中,在不单独区分各行驶车100的情况下记载为“行驶车100a”,在单独区分的情况下记载为“行驶车100a
1”、“行驶车100a
2”等。行驶路r例如是设置于洁净室的顶棚等的行驶轨道。行驶路r包含表示行驶路的分支的分支部br。即、行驶路r将一个行驶轨道从分支部br分支为多个(例如、两个)行驶轨道。行驶路r例如具有从分支部br的上游侧向下游侧的行驶路的一条行驶路亦即行驶路ra、和从分支部br的上游侧向下游侧的行驶路的另一条行驶路亦即行驶路rb。
[0054]
行驶车100a基于行驶路r中相邻的点间亦即行进段而行驶。具体而言,行驶车100a在行驶路ra行驶的情况下,基于在行驶路ra中相邻的点pa、点pb间的行进段而行驶。另外,行驶车100a在行驶路rb行驶的情况下,基于行驶路rb中相邻的点pa、点pc间的行进段而行驶。在第一实施方式中,点pa在分支部br的近前能够向行驶车100a提供表示存在分支路的分支信息。行驶车100a若取得分支信息,则基于与自身的行进方向对应的行进段而行驶。
[0055]
在行驶车系统sys设定包含分支部br的阻塞区域ba。在阻塞区域ba内的一部分设定行驶车100a能够通过行驶路ra的特定区域sa。此外,在阻塞区域ba内,在与特定区域sa不同的范围设定规定区域pa。规定区域pa是行驶车100a在行驶路rb行驶时进入的区域,是行驶车100a在行驶路ra行驶时一次也不会进入的区域。能够提供分支信息的点pa除了是分支点之外,还是行驶车100a进入阻塞区域ba或者特定区域sa时的通过许可的许可等待点。许可等待点是预定通过阻塞区域ba或者特定区域sa的行驶车100a对于任何区域都无法得到
通过许可的情况下停车的点。此外,点pa与“第一点”对应。
[0056]
行驶路r与未图示的处理装置、未图示的储料器(自动仓库)等邻接而设置。处理装置例如是曝光装置、涂布显影机、制膜装置或者蚀刻装置等,对行驶车100a输送的容器内的半导体晶圆实施各种处理。储料器保管行驶车100a输送的容器。此外,行驶车100a也可以是地面行驶的有轨台车等。在是地面行驶的有轨台车的情况下,行驶路r设置在地板等上。
[0057]
行驶车100a将自身的状态信息向控制器200发送。控制器200基于从行驶车100a接收到的状态信息,生成行驶指令。行驶车100a接收来自控制器200的行驶指令而在行驶路r行驶。行驶指令包含输送货物的行驶车100a行驶的预定的行驶路径的信息。行驶路径的信息是指定行驶车100a的从出发地到目的地的行驶路径的至少一部分的信息。
[0058]
控制器200针对预定在分支部br行驶(预定通过)的行驶车100a,控制进入阻塞区域ba或者特定区域sa的许可。行驶车100a在被控制器200允许进入阻塞区域ba的情况下,进入阻塞区域ba。另一方面,行驶车100a在没有被控制器200允许进入阻塞区域ba的情况下,在阻塞区域ba的近前的位置(例如点pa)停止,或者朝向点pa一边减速一边行驶。
[0059]
同样,行驶车100a在被控制器200允许进入特定区域sa的情况下,进入特定区域sa。另一方面,行驶车100a在没有被控制器200允许进入特定区域sa的情况下,在特定区域sa的近前的位置(例如点pa)停止,或者朝向点pa一边减速一边行驶。此外,进入特定区域sa的许可往往通过来自未被允许进入阻塞区域ba的行驶车100a的请求而实现。
[0060]
在上述结构中,行驶车100a向控制器200发送阻塞区域ba的通过请求。即、行驶车100a在预定在行驶路rb行驶的情况下,为了通过特定区域sa以及规定区域pa,向控制器200发送阻塞区域ba的通过请求。控制器200当从行驶车100a接收阻塞区域ba的通过请求时,若在阻塞区域ba不存在其它行驶车100a,则向发出阻塞区域的通过请求的行驶车100a发送阻塞区域ba的通过许可。
[0061]
控制器200能够根据从各行驶车100a接收到的状态信息所含的表示当前位置的信息,识别阻塞区域ba的行驶车100a的存在。另外,控制器200能够从表示与阻塞区域ba相关的阻塞的有无的信息,识别阻塞区域ba的行驶车100a的存在。行驶车100a在取得了阻塞区域ba的通过许可的情况下进入阻塞区域ba。进入了阻塞区域ba的行驶车100a基于点pa、点pc间的行进段而行驶。
[0062]
另外,行驶车100a向控制器200发送特定区域sa的通过请求。在行驶车100a在行驶路ra行驶的情况下,发送特定区域sa的通过请求。即、行驶车100a在预定在行驶路ra行驶的情况下,由于只要能够仅通过特定区域sa即可,所以向控制器200发送特定区域sa的通过请求。控制器200在从行驶车100a接收特定区域sa的通过请求时,若在特定区域sa不存在其它行驶车100a,则向发出了特定区域sa的通过请求的行驶车100a发送特定区域sa的通过许可。
[0063]
控制器200能够根据从各行驶车100a接收到的状态信息所含的表示当前位置的信息,识别特定区域sa的行驶车100a的存在。另外,控制器200能够从与特定区域sa相关的阻塞的有无的信息,识别特定区域sa的行驶车100a的存在。如上所述,规定区域pa设定于当行驶车100a在行驶路ra行驶时一次也不会进入的范围。因此,控制器200即使在规定区域pa存在其它行驶车100a,若在特定区域sa不存在其它行驶车100a,则向发出了特定区域sa的通过请求的行驶车100a发送特定区域sa的通过许可。行驶车100a在取得了特定区域sa的通过
许可的情况下进入特定区域sa。进入了特定区域sa的行驶车100a基于点pa、点pb间的行进段而行驶。
[0064]
行驶车系统sys即使在阻塞区域ba内的规定区域pa存在其它行驶车100a,若在特定区域sa不存在其它行驶车100a,则允许行驶车100a通过特定区域sa,所以行驶车100a能够高效地通过分支部br。
[0065]
图2是表示第一实施方式的行驶车的一个例子的图。如图2所示,行驶车100a沿着从建筑物的顶棚10等悬挂的行驶路r向+x方向行驶,在配置在行驶路r的下方或者下方且侧方(包含y方向的方向)的装货目的地进行物品w的装货。另外,行驶车100a在配置在行驶路r的下方或者下方且侧方的卸货目的地进行物品w的卸货。行驶车100a具备车载装置110。车载装置110根据从控制器200发送的行驶指令来控制行驶车100a。行驶车100a被车载装置110控制,进行各种动作。
[0066]
行驶车100a具备行驶部13和主体部14。行驶部13具备车轮15,通过后述的驱动装置150而沿着行驶路r行驶。主体部14以悬挂的状态设置在行驶部13的下方。主体部14具备移载装置17。移载装置17具备:保持物品w的物品保持部18、使物品保持部18升降的升降驱动部20、以及使升降驱动部20向行驶路r的侧方(+y方向,或者-y方向)移动的横向移动机构21。
[0067]
物品保持部18是具有能够移动的爪部18a的卡盘,使爪部18a进入物品w的凸缘部wa的下方而悬挂地保持物品w。物品保持部18与钢丝或者带等悬挂部件18b连接。升降驱动部20例如是升降器,通过抽出或者卷绕悬挂部件18b,使物品保持部18升降。横向移动机构21通过使多个可动板滑动,使物品保持部18以及升降驱动部20从收纳于主体部14的位置向行驶路r的侧方移动。由行驶车100a进行的物品w的装货以及卸货使用物品保持部18来实施。或者由行驶车100a进行的物品w的装货以及卸货使用升降驱动部20以及横向移动机构21来实施。车载装置110控制物品保持部18、升降驱动部20以及横向移动机构21。
[0068]
在装货目的地p进行物品w的装货的情况下,车载装置110发出指示,以便使行驶车100a与装货目的地p的位置一致地停止,使升降驱动部20(升降驱动部20以及横向移动机构21)动作而使物品保持部18向规定位置移动,由此在装货目的地p进行物品w的装货。装货目的地p例如是处理装置或者储料器的装载口、可载置物品w的搁板部从建筑物的顶棚10等悬挂而设置的悬挂式暂存装置等。
[0069]
在卸货目的地c进行物品w的卸货的情况下,车载装置110发出指示,以便使行驶车100a与卸货目的地c的位置一致地停止,使升降驱动部20(升降驱动部20以及横向移动机构21)动作而使物品保持部18向规定位置移动,由此在卸货目的地c进行物品w的卸货。卸货目的地c例如是处理装置或者储料器的装载口、可载置物品w的搁板部从建筑物的顶棚10等悬挂而设置的悬挂式暂存装置等。
[0070]
图3是表示第一实施方式的行驶车及控制器的结构例的框图。行驶车100a具有车载装置110、位置传感器120、载货传感器130、前方传感器140及驱动装置150。驱动装置150提供使行驶车100a行驶的驱动力。另外驱动装置150提供货物(物品w)的装货及卸货等装卸所使用的驱动力。
[0071]
位置传感器120检测行驶车100a的当前位置。位置传感器120通过有线或者无线以能够通信的方式与车载装置110连接,将检测出的行驶车100a的当前位置提供给车载装置
110。例如,位置传感器120检测设置在行驶路r的点(例如点pa、pb、pc等)的位置标记,由此检测行驶路r的地图信息中的行驶车100a的当前位置。另外,行驶车100a的点间的当前位置通过基于行驶车100a的速度与行驶时间的行驶距离、使用了编码器的移动距离而求出。载货传感器130检测货物(物品w)的有无。载货传感器130通过有线或者无线以能够通信的方式与车载装置110连接,将检测结果提供给车载装置110。
[0072]
前方传感器140监视行驶车100a的行进方向(行驶方向)的前方,检测前方的其它行驶车100a的存在。前方传感器140通过有线或者无线以能够通信的方式与连接,并将检测结果提供给车载装置110。各行驶车100a通过由前方传感器140进行的前方的其它行驶车100a的存在的检测来控制行驶速度,能够防止与前方的其它行驶车100a的碰撞。此外,位置传感器120和前方传感器140中的一方或者双方也可以不搭载于行驶车100a,例如也可以配设于行驶路r等。另外,行驶车系统sys也可以不具备位置传感器120、载货传感器130以及前方传感器140中的至少一个,也可以具备其它传感器。
[0073]
车载装置110搭载于行驶车100a,从控制器200接收行驶指令,来控制行驶车100a的各部分。车载装置110具有行驶控制部111、通信部112以及存储部113。通信部112通过无线lan(local area network:局域网)等以能够通信的方式与后述的控制器200的通信部230连接。通信部112从控制器200的通信部230接收行驶指令,并将接收到的行驶指令存储于存储部113。
[0074]
行驶控制部111基于存储于存储部113的行驶指令,控制行驶车100a的各部分。例如,行驶控制部111基于由行驶指令决定的行驶路径来控制驱动装置150,使行驶车100a沿着行驶路径行驶。行驶控制部111使搭载于行驶车100a的各种传感器(例如、位置传感器120等)执行检测,并将检测结果存储于存储部113。
[0075]
行驶控制部111使用存储于存储部113的信息,生成行驶车100a的状态信息。例如,状态信息包含识别行驶车100a的识别信息,并且包含与当前位置、目的地、行驶状态、货物的状态、前方的状态、通过请求以及解除请求有关的信息。当前位置是表示位置传感器120检测出的行驶车100a的当前位置的信息。如上所述,当前位置也可以对位置传感器120检测出的行驶车100a的当前位置加上行驶距离来进行更新。目的地由存储于存储部113的行驶指令等决定,是表示行驶车100a的目的地的信息。
[0076]
行驶状态是表示行驶车100a的当前的速度的信息。例如,行驶状态也可以在速度大于“0”的情况下表示行驶车100a处于行驶中(例如、标志“1”),在速度是“0”的情况下表示行驶车100a处于停车中(例如、标志“0”)。货物的状态是表示载货传感器130检测出的货物(物品w)的有无的信息(例如、有:“1”,无:“0”),以及是表示输送中的货物(物品w)的种类的信息(识别货物的识别信息)。前方的状态是表示在前方传感器140的检测范围内在自身的前方是否存在其它行驶车100a的信息(例如、存在的“1”,不存在的“0”)。
[0077]
通过请求是表示行驶车100a请求通过的阻塞区域ba或者特定区域sa的识别信息。此外,通过请求的信息包含在行驶车100a没有发出通过请求时,表示没有发出通过请求的信息(或者空的信息、null值等)。此外,通过请求也可以包含通过的方向(从分支部br的行进方向)。例如,通过的方向是表示行驶路ra的方向的信息、表示行驶路rb的方向的信息。在第一实施方式中,在是阻塞区域ba的通过请求的情况下,通过的方向是行驶路rb的方向,在是特定区域sa的通过请求的情况下,通过的方向是行驶路ra的方向。
[0078]
解除请求是表示行驶车100a通过的阻塞区域ba或者特定区域sa的识别信息。另外,解除请求也可以包含表示行驶车100a通过了阻塞区域ba或者特定区域sa的信息。此外,解除请求的信息包含在行驶车100a没有发出解除请求时,表示没有发出解除请求的信息(或者空的信息、null值等)。另外,解除请求也可以在控制器200中,仅通过识别从行驶车100a的当前位置通过了阻塞区域ba或者特定区域sa的形态来实现的情况下,不被利用。
[0079]
行驶控制部111基于从控制器200接收到的行驶指令(例如、行驶车100a的出发地和目的地)、以及预先存储在存储部113的行驶路r的地图信息,来设定行驶路径。存储部113是非易失性存储器等,存储状态信息等各种信息。行驶控制部111适当地生成状态信息,将存储于存储部113的状态信息更新为最新的状态信息。通信部112将存储于存储部113的状态信息向控制器200发送(参照图4)。通信部112也可以在没有从控制器200接收到通过许可的情况下,在得到通过许可之前,向控制器200发送包含通过请求的状态信息。即使在通过多次发送通过请求,但因通信等的暂时性问题而无法发送通过请求的情况下,也能够更可靠地向控制器200发送通过请求。通过请求也可以包含发送时间。另外,通信部112也可以向控制器200多次发送解除请求。例如,对于解除请求而言,可以预先决定发送的次数,也可以在预先决定的时间内发送。
[0080]
控制器200具有指令生成部210、分支控制部220、通信部230以及存储部240。控制器200例如是具备cpu(central processing unit:中央处理器)、主存储器、存储装置、通信装置等,进行各种信息的处理的计算机装置。此外,计算机装置的结构是任意的,例如可以由一个装置构成,也可以由多个装置构成。通信部230通过无线lan等能够与各行驶车100a通信,从各行驶车100a接收状态信息。存储部240是非易失性存储器等,存储由通信部230接收到的状态信息等。例如,存储部240将各行驶车100a的状态信息与各行驶车100a的识别信息相关联地存储。
[0081]
图4是表示第一实施方式的控制器存储的状态信息的例子的图。如图4所示,存储部240作为状态信息,将当前位置、目的地、行驶状态、货物的状态、前方的状态、通过请求以及解除请求的信息与识别各行驶车100a的识别信息亦即行驶车id相关联地存储。
[0082]
指令生成部210基于由预先赋予的任务(例如、物品w等货物的输送)等决定的目的地的信息、和存储于存储部240的状态信息,来决定负责与任务对应的行驶指令的行驶车100a。目的地例如是能够与处理装置侧或者储料器侧进行货物(物品w)的交接的访问点(装载口、暂存区,出入库口等)。指令生成部210基于根据任务而决定的目的地和负责任务的行驶车100a的当前位置,来决定行驶车100a的行驶路径,并生成指定所决定的行驶路径的行驶指令。
[0083]
分支控制部220基于存储于存储部240的状态信息所含的通过请求,决定是否对行驶车100a给予通过许可。另外,分支控制部220基于存储于存储部240的状态信息所含的解除请求,解除阻塞区域ba或者特定区域sa的阻塞。
[0084]
实施通过许可的给予、阻塞的解除时,分支控制部220生成(更新)阻塞信息。存储部240存储阻塞信息。阻塞信息包含各阻塞区域ba以及与各阻塞区域ba所含的各特定区域sa的阻塞有关的信息。阻塞信息包含识别各阻塞区域ba以及各特定区域sa的识别信息。此外,阻塞信息包含表示各阻塞区域ba以及各特定区域sa的阻塞的有无的信息。并且,阻塞信息包含识别发送了针对各阻塞区域ba以及各特定区域sa的通过请求的行驶车100a的识别
信息。表示阻塞的有无的信息是表示阻塞区域ba以及特定区域sa被阻塞的状态或者未被阻塞的状态的信息。关于识别发送了通过请求的行驶车100a的识别信息,控制器200由于能够根据各行驶车100a的当前位置来识别各行驶车100a的前后关系,所以能够从在行驶路r上先行的行驶车100a起依次给予通过许可。此外,控制器200也可以根据通过请求的发送顺序(例如,发送时间顺序、接收时间顺序),来决定处理的通过请求的顺序。
[0085]
此外,在不同的时刻从一个行驶车100a接收到针对相同的区域的通过请求的情况下,在对该行驶车100a给予通过许可的时刻,从存储部240删除来自该行驶车100a的全部的通过请求,而不重复给予通过许可。同样,在不同的时刻从一个行驶车100a接收到针对相同的区域的解除请求的情况下,在解除相应的区域的阻塞的时刻,从存储部240删除来自该行驶车100a的全部的解除请求,不意外地进行阻塞的解除。另外,在不同的时刻从一个行驶车100a接收到针对阻塞区域ba和该阻塞区域ba所含的特定区域sa的通过请求的情况下,从存储部240删除先接收到的通过请求,给予针对后接收到的通过请求的通过许可。分支控制部220伴随着存储于存储部240的状态信息的更新,将存储于存储部240的阻塞信息更新为最新的阻塞信息。
[0086]
而且,分支控制部220针对阻塞信息所含的通过请求,根据相应的区域(阻塞区域ba或者特定区域sa)中的其它行驶车100a的有无、和相应的区域的阻塞的有无的一方或者双方,来决定对与识别信息对应的行驶车100a的通过许可的给予。另外,分支控制部220确认存储于存储部240的状态信息所含的解除请求,来更新相应的区域(阻塞区域ba或者特定区域sa)的阻塞信息。这里,阻塞信息的更新是指将表示阻塞的有无的信息更新为没有被阻塞的信息,以及识别发送了通过请求的行驶车100a的识别信息的删除。另外,分支控制部220也可以在确认发出了解除请求的行驶车100a的当前位置的基础上,来更新阻塞信息。
[0087]
图5是表示第一实施方式的向特定区域进入的行驶车的处理的流程的例子的流程图。如图5所示,通信部112向控制器200发送特定区域sa的通过请求(步骤s101)。具体而言,行驶控制部111生成作为通过请求包含特定区域sa的识别信息的状态信息。然后,通信部112向控制器200发送行驶控制部111生成的状态信息。
[0088]
行驶控制部111判定是否接收到特定区域sa的通过许可(步骤s102)。具体而言,行驶控制部111判定在通信部112中是否从控制器200接收到特定区域sa的通过许可。此时,行驶控制部111在接收到特定区域sa的通过许可的情况下(步骤s102:是),基于行进段进入特定区域sa(步骤s103)。具体而言,行驶控制部111在通信部112中从控制器200接收到特定区域sa的通过许可的情况下,根据已设定的行驶路径进入特定区域sa。
[0089]
另一方面,在由行驶控制部111判定为没有接收到特定区域sa的通过许可的情况下(步骤s102:否),再次执行步骤s101的处理。具体而言,行驶控制部111在通信部112中没有从控制器200接收到特定区域sa的通过许可的情况下,指示通信部112发送包含特定区域sa的通过请求的状态信息。
[0090]
图6是表示第一实施方式的向阻塞区域或者特定区域进入的行驶车的处理的流程的例子的流程图。在图6中说明的行驶车100a向特定区域sa的进入基于从向行驶路rb的方向的行驶预定切换为向行驶路ra的方向的行驶预定。另外,在图6的说明中,适当地利用图7~图11。图7以及图8是表示第一实施方式的向阻塞区域进入的行驶车的例子的图。图9~图11是表示第一实施方式的向特定区域进入的行驶车的例子的图。
[0091]
首先,说明在阻塞区域ba以及距离点pa一定距离以上的上游侧的位置行驶的行驶车100a,在阻塞区域ba不存在其它行驶车100a的状况下,发送阻塞区域ba的通过请求的情况(参照图7)。此外,为了简化说明,虽设为在阻塞区域ba不存在其它行驶车100a的状况,但详细而言,包含在阻塞区域ba不存在预定进入的其它行驶车100a。如图6所示,通信部112向控制器200发送阻塞区域ba的通过请求(步骤s201)。具体而言,行驶控制部111生成作为通过请求包含阻塞区域ba的识别信息的状态信息。而且,通信部112向控制器200发送行驶控制部111生成的状态信息。
[0092]
行驶控制部111判定是否接收到阻塞区域ba的通过许可(步骤s202)。具体而言,行驶控制部111判定在通信部112中是否从控制器200接收到阻塞区域ba的通过许可。此时,行驶控制部111在接收到阻塞区域ba的通过许可的情况下(步骤s202:是),基于行进段而进入阻塞区域ba(步骤s203)。具体而言,行驶控制部111在通信部112中从控制器200接收到阻塞区域ba的通过许可的情况下,为了进行基于点pa、点pc间的行进段的行驶,而进入阻塞区域ba(参照图8)。
[0093]
接下来说明在阻塞区域ba及距点pa一定距离以上的上游侧的位置行驶的行驶车100a1,在规定区域pa存在其它行驶车100a2的状况下,发送阻塞区域ba的通过请求的情况(参照图9)。如图6所示,通信部112向控制器200发送阻塞区域ba的通过请求(步骤s201)。具体而言,行驶控制部111生成作为通过请求包含阻塞区域ba的识别信的状态信息。然后,通信部112向控制器200发送行驶控制部111生成的状态信息。
[0094]
行驶控制部111判定是否接收到阻塞区域ba的通过许可(步骤s202)。具体而言,行驶控制部111判定在通信部112中是否从控制器200接收到阻塞区域ba的通过许可。此时,行驶控制部111在没有接收到阻塞区域ba的通过许可的情况下(步骤s202:否),判定是否取得了分支信息(步骤s204)。具体而言,行驶控制部111在通信部112中没有从控制器200接收到阻塞区域ba的通过许可的情况下,判定是否取得了来自点pa的分支信息。此时,在没有通过行驶控制部111取得了来自点pa的分支信息的情况下(步骤s204:否),再次执行步骤s201的处理。
[0095]
另一方面,行驶控制部111在取得了来自点pa的分支信息的情况下(步骤s204:是),判定在点pa的附近停车之后(取得了来自点pa的分支信息之后)是否经过了规定时间(步骤s205)。这里,来自点pa的分支信息的取得通过行驶车100a1行驶到点pa的附近而实现(参照图10)。即、是指在没有得到阻塞区域ba的通过许可的状态下,行驶车100a1行驶到点pa的附近(在点pa的附近停车)。因此,行驶控制部111在取得了来自点pa的分支信息的情况下,为了将行驶路径从行驶路rb变更为行驶路ra,判定在点pa的附近停车之后(取得了来自点pa的分支信息之后)是否经过了规定时间。规定时间只要设定为在阻塞区域ba的近前不会产生多个行驶车100a的滞留的程度即可。在没有经过规定时间的情况下(步骤s205:否),再次执行步骤s201的处理。
[0096]
在由行驶控制部111判定为在点pa的附近停车之后(取得了来自点pa的分支信息之后)经过了规定时间的情况下(步骤s205:是),通信部112向控制器200发送特定区域sa的通过请求(步骤s206)。具体而言,行驶控制部111生成作为通过请求包含特定区域sa的识别信息的状态信息。而且,通信部112向控制器200发送行驶控制部111生成的状态信息。
[0097]
行驶控制部111判定是否接收到特定区域sa的通过许可(步骤s207)。具体而言,行
驶控制部111判定在通信部112中是否从控制器200接收到特定区域sa的通过许可。此时,行驶控制部111在没有接收到特定区域sa的通过许可的情况下(步骤s207:否),再次执行步骤s206的处理。另一方面,行驶控制部111在接收到特定区域sa的通过许可的情况下(步骤s207:是),基于行进段而进入特定区域sa(步骤s208)。具体而言,行驶控制部111在通信部112中从控制器200接收到特定区域sa的通过许可的情况下,为了进行基于点pa、点pb间的行进段的行驶,而进入特定区域sa(参照图11)。
[0098]
图12是表示第一实施方式的执行阻塞区域的通过许可的设定处理的控制器的处理的流程的例子的流程图。分支控制部220判定是否接收到阻塞区域ba的通过请求(步骤s301)。具体而言,分支控制部220确认在通信部230中接收并存储于存储部240的状态信息,判定是否存在阻塞区域ba的通过请求(状态信息)。此时,分支控制部220在没有接收到阻塞区域ba的通过请求的情况下(步骤s301:否),再次执行步骤s301的处理。即、分支控制部220成为等待接收阻塞区域ba的通过请求的状态。
[0099]
另一方面,分支控制部220在接收到阻塞区域ba的通过请求的情况下(步骤s301:是),判定在阻塞区域ba是否存在其它行驶车100a(步骤s302)。具体而言,分支控制部220在阻塞区域ba的通过请求被存储于存储部240的情况下,根据在存储部240存储的状态信息来生成(更新)阻塞信息。然后,分支控制部220针对阻塞信息所含的通过请求,根据表示相应的阻塞区域ba的阻塞的有无的信息,来判定在相应的阻塞区域ba是否存在其它行驶车100a。另外,分支控制部220也可以基于各行驶车100a的当前位置,确认相应的阻塞区域ba的其它行驶车100a的有无,来判定在相应的阻塞区域ba是否存在其它行驶车100a。
[0100]
分支控制部220在判定为在阻塞区域ba存在其它行驶车100a的情况下(步骤s302:是),不给予通过许可而结束处理。分支控制部220在判定为在阻塞区域ba不存在其它行驶车100a的情况下(步骤s302:否),使阻塞区域ba阻塞,向通信部230发出将阻塞区域ba的通过许可发送给行驶车100a的指示(步骤s303)。具体而言,分支控制部220在相应的阻塞区域ba处于未阻塞的状态的情况下,切换为阻塞相应的阻塞区域ba的状态。另外,分支控制部220也可以根据各行驶车100a的当前位置,在相应的阻塞区域ba不存在其它行驶车100a的情况下,切换为阻塞相应的阻塞区域ba的状态。然后,通信部230向发送了通过请求的行驶车100a发送相应的阻塞区域ba的通过许可。此外,分支控制部220在由于被给予了通过许可的行驶车100a多次发送通过请求而在存储部240存在多个与该行驶车100a对应的阻塞区域ba的通过请求的情况下,删除该通过请求的全部。
[0101]
图13是表示第一实施方式的执行特定区域的通过许可的设定处理的控制器的处理的流程的例子的流程图。分支控制部220判定是否接收到特定区域sa的通过请求(步骤s401)。具体而言,分支控制部220确认在通信部230中接收并存储于存储部240的状态信息,判定是否存在特定区域sa的通过请求(状态信息)。此时,分支控制部220在没有接收到特定区域sa的通过请求的情况下(步骤s401:否),再次执行步骤s401的处理。即、分支控制部220成为等待接收特定区域sa的通过请求的状态。
[0102]
另一方面,分支控制部220在接收到特定区域sa的通过请求的情况下(步骤s401:是),判定在特定区域sa是否存在其它行驶车100a(步骤s402)。具体而言,分支控制部220在特定区域sa的通过请求被存储于存储部240的情况下,根据存储于存储部240的状态信息,生成(更新)阻塞信息。然后,分支控制部220针对阻塞信息所含的通过请求,根据表示相应
的特定区域sa的阻塞的有无的信息,判定在相应的特定区域sa是否存在其它行驶车100a。另外,分支控制部220也可以根据各行驶车100a的当前位置,确认相应的特定区域sa的其它行驶车100a的有无,判定在相应的特定区域sa是否存在其它行驶车100a。
[0103]
分支控制部220在判定为在特定区域sa存在其它行驶车100a的情况下(步骤s402:是),不给予通过许可而结束处理。分支控制部220在判定为在特定区域sa不存在其它行驶车100a的情况下(步骤s402:否),使特定区域sa阻塞,向通信部230发出将特定区域sa的通过许可发送给行驶车100a的指示(步骤s403)。具体而言,分支控制部220在相应的特定区域sa的阻塞的有无是没有阻塞的状态的情况下,切换为阻塞相应的特定区域sa的状态。另外,分支控制部220也可以根据各行驶车100a的当前位置,在相应的特定区域sa不存在其它行驶车100a的情况下,切换为阻塞相应的特定区域sa的状态。然后,通信部230向发送了通过请求的行驶车100a发送相应的特定区域sa的通过许可。此外,分支控制部220在由于被给予了通过许可的行驶车100a多次发送通过请求而在存储部240存在多个与该行驶车100a对应的特定区域sa的通过请求的情况下,删除该通过请求的全部。
[0104]
图14是表示第一实施方式的特定区域的通过中的行驶车的处理的流程的例子的流程图。在图14的说明中,适当地利用图15。图15是表示第一实施方式的通过特定区域的行驶车的例子的图。
[0105]
如图14所示,行驶控制部111通过基于行进段的行驶来判定是否通过了特定区域sa(步骤s501)。例如,行驶车100a1基于点pa、点pb间的行进段进行行驶(参照图15)。具体而言,行驶控制部111根据考虑了距点pa的行驶距离的当前位置,或者由点pb的位置标记的检测得到的当前位置,来判定是否通过了特定区域sa。此时,行驶控制部111在没有通过特定区域sa的情况下(步骤s501:否),再次执行步骤s501的处理。具体而言,行驶控制部111在考虑了距点pa的行驶距离的当前位置处于特定区域sa内的情况下,或者没有检测到点pb的位置标记的情况下,在通过特定区域sa之前反复执行步骤s501的处理。
[0106]
另一方面,行驶控制部111在通过了特定区域sa的情况下(步骤s501:是),指示通信部112向控制器200发送所通过的特定区域sa的阻塞的解除请求(步骤s502)。具体而言,行驶控制部111在通过考虑了距点pa的行驶距离的当前位置是特定区域sa外的情况下(参照图15),或者在通过点pb的位置标记的检测通过了特定区域sa的情况下(参照图15),生成包含表示所通过的特定区域sa的识别信息的解除请求(状态信息)。而且,通信部112向控制器200发送包含所通过的特定区域sa的阻塞的解除请求的状态信息。此外,行驶车100a1也可以多次发送包含与所通过的特定区域sa对应的解除请求的状态信息。
[0107]
图16是表示第一实施方式的阻塞区域的通过中的行驶车的处理的流程的例子的流程图。在图16的说明中,适当地利用图17以及图18。图17以及图18是表示第一实施方式的通过阻塞区域的行驶车的例子的图。
[0108]
如图16所示,行驶控制部111通过基于行进段的行驶来判定是否通过了特定区域sa(步骤s601)。例如,取得了阻塞区域ba的通过许可的行驶车100a基于点pa、点pc间的行进段进行行驶(参照图17以及图18)。具体而言,行驶控制部111根据考虑了距点pa的行驶距离的当前位置,判定是否通过了特定区域sa。此时,行驶控制部111在没有通过特定区域sa的情况下(步骤s601:否),再次执行步骤s601的处理。具体而言,行驶控制部111在考虑了距点pa的行驶距离的当前位置处于特定区域sa内的情况下,在通过特定区域sa之前反复执行步
骤s601的处理。
[0109]
另一方面,行驶控制部111在通过了特定区域sa的情况下(步骤s601:是),指示通信部112向控制器200发送所通过的特定区域sa的阻塞的解除请求(步骤s602)。具体而言,行驶控制部111在考虑了距点pa的行驶距离的当前位置处于特定区域sa外的情况下(参照图17),生成包含表示所通过的特定区域sa的识别信息的解除请求(状态信息)。而且,通信部112将包含所通过的特定区域sa的阻塞的解除请求的状态信息向控制器200发送。此外,行驶车100a也可以多次发送包含与所通过的特定区域sa对应的解除请求的状态信息。
[0110]
接着,行驶控制部111通过基于行进段的行驶来判定是否通过了阻塞区域ba(步骤s603)。具体而言,行驶控制部111根据考虑了距点pa的行驶距离的当前位置或者由点pc的位置标记的检测而得到的当前位置,判定是否通过了阻塞区域ba。此时,行驶控制部111在没有通过阻塞区域ba的情况下(步骤s603:否),再次执行步骤s603的处理。具体而言,行驶控制部111在考虑了距点pa的行驶距离的当前位置处于阻塞区域ba内的情况下或者没有检测出点pc的位置标记的情况下,在通过阻塞区域ba之前反复执行步骤s603的处理。
[0111]
另一方面,行驶控制部111在通过了阻塞区域ba的情况下(步骤s603:是),指示通信部112向控制器200发送所通过的阻塞区域ba的阻塞的解除请求(步骤s604)。具体而言,行驶控制部111在考虑了距点pa的行驶距离的当前位置处于阻塞区域ba外的情况下(参照图18),或者在通过点pc的位置标记的检测而通过了阻塞区域ba的情况下(参照图18),生成包含表示所通过的阻塞区域ba的识别信息的解除请求(状态信息)。而且,通信部112将包含所通过的阻塞区域ba的阻塞的解除请求的状态信息向控制器200发送。此外,行驶车100a也可以多次发送包含与所通过的阻塞区域ba对应的解除请求的状态信息。
[0112]
图19是表示第一实施方式的执行特定区域的阻塞的解除设定处理的控制器的处理的流程的例子的流程图。如图19所示,分支控制部220判定是否接收到特定区域sa的阻塞的解除请求(步骤s701)。具体而言,分支控制部220确认在通信部230中接收并存储于存储部240的状态信息,来判定是否存在特定区域sa的解除请求(状态信息)。此时,分支控制部220在没有接收到特定区域sa的阻塞的解除请求(状态信息)的情况下(步骤s701:否),再次执行步骤s701的处理。即、分支控制部220成为等待接收特定区域sa的阻塞的解除请求的状态。
[0113]
另一方面,分支控制部220在接收到特定区域sa的阻塞的解除请求的情况下(步骤s701:是),解除特定区域sa的阻塞,设定为能够通过特定区域sa(步骤s702)。具体而言,分支控制部220在特定区域sa的解除请求被存储于存储部240的情况下,更新特定区域sa的阻塞信息。例如,分支控制部220将阻塞信息中的表示阻塞的有无的信息更新为没有阻塞的信息。此外,分支控制部220也可以在确认发出了解除请求的行驶车100a的当前位置的基础上更新阻塞信息。此外,分支控制部220在由于相同的行驶车100a对相同的特定区域sa多次发送了解除请求而在存储部240存在多个该特定区域sa的解除请求的情况下,删除该解除请求的全部。
[0114]
图20是表示第一实施方式的执行阻塞区域的阻塞的解除设定处理的控制器的处理的流程的例子的流程图。如图20所示,分支控制部220判定是否收到了阻塞区域ba的阻塞的解除请求(步骤s801)。具体而言,分支控制部220确认在通信部230中接收并存储于存储部240的状态信息,来判定是否存在阻塞区域ba的解除请求(状态信息)。此时,分支控制部
220在没有收到阻塞区域ba的阻塞的解除请求(状态信息)的情况下(步骤s801:否),再次执行步骤s801的处理。即、分支控制部220成为等待接收阻塞区域ba的阻塞的解除请求的状态。
[0115]
另一方面,分支控制部220在接收到阻塞区域ba的阻塞的解除请求的情况下(步骤s801:是),解除阻塞区域ba的阻塞,设定为能够通过阻塞区域ba(步骤s802)。具体而言,分支控制部220在阻塞区域ba的解除请求被存储于存储部240的情况下,更新阻塞区域ba的阻塞信息。例如,分支控制部220将阻塞信息中的表示阻塞的有无的信息更新为没有阻塞的信息。此外,分支控制部220也可以在确认发出了解除请求的行驶车100a的当前位置的基础上,更新阻塞信息。此外,分支控制部220在由于相同的行驶车100a对相同的阻塞区域ba多次发送解除请求而在存储部240存在多个该阻塞区域ba的解除请求的情况下,删除该解除请求的全部。
[0116]
在行驶车系统sys中,无论阻塞区域ba的阻塞的有无与否,若在特定区域sa不存在其它行驶车100a,则对发出了特定区域sa的通过请求的行驶车100a给予特定区域sa的通过许可,所以行驶车100a能够高效地通过分支部br。在行驶车系统sys中,无论阻塞区域ba的阻塞的有无与否,都进行特定区域sa的阻塞的解除,所以行驶车100a能够高效地通过分支部br。在行驶车系统sys中,在没有取得阻塞区域ba的通过许可的状态下取得了分支信息的行驶车100a发出特定区域sa的通过请求,所以能够抑制阻塞区域ba的近前的多个行驶车100a的滞留。
[0117]
[第二实施方式]
[0118]
在第二实施方式中,往往对与上述第一实施方式相同的结构标注相同的附图标记,省略或者简化详细的说明。在第二实施方式中,在不单独区分各行驶车100的情况下记载为“行驶车100b”,在单独区别的情况下记载为“行驶车100b
1”、“行驶车100b
2”等。
[0119]
图21是表示第二实施方式的行驶车系统的一个例子的图。在行驶车系统sys2中,为了便于点的施工,以点pa与分支部br的距离变短的情况为例。另外,从防止各行驶车100b的碰撞的观点考虑,决定阻塞区域ba的范围(大小)。其结果,在行驶车系统sys2中,点pa包含于阻塞区域ba内。在行驶车系统sys中,点pa作为分支点以及实现许可等待点的作用的点来进行说明。如上所述,许可等待点是成为没有得到通过许可的行驶车100b停车的点。在点pa包含在阻塞区域ba的情况下,只要不进入阻塞区域ba,则无法行驶到许可等待点。因此,在行驶车系统sys2中,将阻塞区域ba外的行驶路r具备的多个点中的、点pa的近前且更接近点pa的点pd作为许可等待点而代替点pa。
[0120]
另外,与第一实施方式相同,行驶车100b基于点间的行进段而行驶。因此,在将点pd作为许可等待点的情况下,包含点pd的下游侧的行进段处于点pd、点pa间。即、在点pa存在于阻塞区域ba内的情况下,行驶车100b难以进行从行驶路rb向行驶路ra的行驶路径的切换。在阻塞区域ba的近前难以进行行驶路径的切换的情况下,可能在阻塞区域ba的近前产生多个行驶车100b的滞留。因此,在行驶车系统sys2中,设为以下的结构,即、点pd能够向行驶车100b提供分支信息,关于点pa,不作为特定区域sa的行进段的点来采用。在第二实施方式中,将点pd、点pb间的段称为“虚拟段vs”。即、虚拟段vs是指从点pd到达点pb的段(虚拟的段)。行驶车100b在虚拟段vs行驶的情况下,忽略点pa。此外,点pa与“第一点”对应,点pd与“第二点”对应。
[0121]
图22是表示第二实施方式的行驶车以及控制器的结构例的框图。行驶车100b具有:车载装置110b、位置传感器120、载货传感器130、前方传感器140以及驱动装置150。车载装置110b具有行驶控制部111b、通信部112以及存储部113。
[0122]
行驶控制部111b若在没有取得阻塞区域ba或者特定区域sa的通过许可的状况下取得分支信息,则指示通信部112向控制器200发送特定区域sa的通过请求。具体而言,行驶车100b在没有取得阻塞区域ba或者特定区域sa的通过许可的状态下保持原样行驶到点pd的附近。此时,行驶控制部111b取得来自点pd的分支信息。另外,行驶车100b在点pd的附近停止,成为等待通过请求的许可的状态。而且,行驶控制部111b若从取得来自点pd的分支信息之后经过规定时间,则指示通信部112向控制器200发送特定区域sa的通过请求。此外,行驶车100b在从最初就向控制器200发送特定区域sa的通过请求的情况下、即在从最初就将行驶路ra的方向作为预定行驶的情况下,不等待规定时间的经过。然后,行驶控制部111b在通信部112中从控制器200接收到特定区域sa的通过许可的情况下,基于点pd、点pb间的虚拟段vs而行驶,进入特定区域sa。此外,行驶车100b在从最初就向控制器200发送特定区域sa的通过请求的情况下,执行上述步骤s101以及步骤s102,在步骤s103中基于虚拟段vs而行驶,进入特定区域sa。虚拟段vs例如被预先制作并保持在行驶车100b或者控制器200。而且,行驶车100b在取得了特定区域sa的通过许可的情况下,取出保持的虚拟段vs,或者从控制器200取得虚拟段vs,由此基于虚拟段vs而行驶。
[0123]
控制器200具有指令生成部210、分支控制部220、通信部230以及存储部240。控制器200的功能与第一实施方式的控制器200相同。此外,如上所述,控制器200也可以保持虚拟段vs。
[0124]
图23是表示第二实施方式的进入阻塞区域或者特定区域的行驶车的处理的流程的例子的流程图。在图23中说明的行驶车100b的向特定区域sa的进入基于从向行驶路rb的方向的行驶预定切换为向行驶路ra的方向的行驶预定。另外,在图23的说明中,适当地利用图24~图26。图24~图26是表示第二实施方式的向特定区域进入的行驶车的例子的图。
[0125]
在图23中,对在阻塞区域ba以及距点pd一定距离以上的上游侧的位置行驶的行驶车100b1,在规定区域pa存在其它行驶车100b2的状况下,发送阻塞区域ba的通过请求的情况进行说明(参照图24)。如图23所示,通信部112向控制器200发送阻塞区域ba的通过请求(步骤s901)。行驶控制部111b判定是否接收到阻塞区域ba的通过许可(步骤s902)。此时,行驶控制部111在接收到阻塞区域ba的通过许可的情况下(步骤s902:是),基于行进段而进入阻塞区域ba(步骤s903)。这里,行驶车100b1进入阻塞区域ba时的行进段成为点pd、点pa间的行进段、和点pa、点pc间的行进段。
[0126]
行驶控制部111b在没有接收到阻塞区域ba的通过许可的情况下(步骤s902:否),判定是否取得了分支信息(步骤s904)。具体而言,行驶控制部111b在通信部112中没有从控制器200接收到阻塞区域ba的通过许可的情况下,判定是否取得了来自点pd的分支信息。此时,在由行驶控制部111b没有取得来自点pd的分支信息的情况下(步骤s904:否),再次执行步骤s901的处理。
[0127]
另一方面,行驶控制部111b在取得了来自点pd的分支信息的情况下(步骤s904:是),判定从在点pd的附近停车之后(取得了来自点pd的分支信息之后)是否经过了规定时间(步骤s905)。这里,来自点pd的分支信息的取得通过行驶车100b1行驶到点pd的附近而实
现(参照图25)。即、是指在没有得到阻塞区域ba的通过许可的状态下,行驶车100b1行驶到点pd的附近(在点pd的附近停车)。因此,行驶控制部111b在取得来自点pd的分支信息的情况下,为了将行驶路径从行驶路rb变更为行驶路ra,判定在点pd的附近停车之后(从取得了来自点pd的分支信息之后)是否经过了规定时间。在没有经过规定时间的情况下(步骤s905:否),再次执行步骤s901的处理。
[0128]
在由行驶控制部111b判定为在点pd的附近停车之后(从取得了来自点pd的分支信息之后)经过了规定时间的情况下(步骤s905:是),通信部112向控制器200发送特定区域sa的通过请求(步骤s906)。行驶控制部111b判定是否接收到特定区域sa的通过许可(步骤s907)。此时,行驶控制部111b在没有接收到特定区域sa的通过许可的情况下(步骤s907:否),再次执行步骤s906的处理。另一方面,行驶控制部111b在接收到特定区域sa的通过许可的情况下(步骤s907:是),基于虚拟段vs而进入特定区域sa(步骤s908)。具体而言,行驶控制部111b在通信部112中从控制器200接收到特定区域sa的通过许可的情况下,为了进行基于点pd、点pb间的虚拟段vs的行驶,而进入特定区域sa(参照图26)。
[0129]
图27是表示第二实施方式的特定区域的通过中的行驶车的处理的流程的例子的流程图。在图27的说明中,适当地利用图28。图28是表示第二实施方式的通过特定区域的行驶车的例子的图。
[0130]
如图27所示,行驶控制部111b通过基于虚拟段vs的行驶来判定是否通过了特定区域sa(步骤s1001)。具体而言,行驶控制部111b根据考虑了距点pd的行驶距离的当前地、或者由点pb的位置标记的检测而得到的当前位置,来判定是否通过来特定区域sa。此时,行驶控制部111b在没有通过特定区域sa的情况下(步骤s1001:否),再次执行步骤s1001的处理。具体而言,行驶控制部111b在考虑了距点pd的行驶距离的当前位置处于特定区域sa内的情况下,或者在没有检测出点pb的位置标记的情况下,在通过特定区域sa之前反复执行步骤s1001的处理。
[0131]
另一方面,行驶控制部111b在通过了特定区域sa的情况下(步骤s1001:是),指示通信部112向控制器200发送所通过的特定区域sa的阻塞的解除请求(步骤s1002)。具体而言,行驶控制部111b在通过考虑了距点pd的行驶距离的当前位置处于特定区域sa外的情况下(参照图28),或者通过点pb的位置标记的检测而明确通过了特定区域sa的情况下(参照图28),生成包含表示所通过的特定区域sa的识别信息的解除请求(状态信息)。而且,通信部112将包含所通过的特定区域sa的阻塞的解除请求的状态信息向控制器200发送。此外,行驶车100b1也可以多次发送包含与所通过的特定区域sa对应的解除请求的状态信息。
[0132]
图29~图32是表示第二实施方式的通过阻塞区域的行驶车的例子的图。例如,对在阻塞区域ba以及距离点pd一定距离以上的上游侧的位置行驶的行驶车100b,在阻塞区域ba不存在其它行驶车100b的状况下,发送阻塞区域ba的通过请求的情况进行说明(参照图29)。
[0133]
行驶车100b向控制器200发送阻塞区域ba的通过请求,并从控制器200接收阻塞区域ba的通过许可。而且,行驶车100b为了进行基于点pd、点pa间的行进段、以及点pa、点pc间的行进段的行驶,而进入阻塞区域ba(参照图30)。接着,行驶车100b在考虑了距点pa的行驶距离的当前位置处于特定区域sa外的情况下(参照图31),生成包含表示所通过的特定区域sa的识别信息的解除请求(状态信息)。然后,行驶车100b将包含所通过的特定区域sa的阻
塞的解除请求的状态信息向控制器200发送。
[0134]
然后,行驶车100b在考虑了距点pa的行驶距离的当前位置处于阻塞区域ba外的情况下(参照图32),或者在通过点pc的位置标记的检测而通过了阻塞区域ba的情况下(参照图32),输出包含表示所通过的阻塞区域ba的识别信息的解除请求(状态信息)。而且,行驶车100b将包含所通过的阻塞区域ba的阻塞的解除请求的状态信息向控制器200发送。
[0135]
在行驶车系统sys2中,将能够提供分支信息的点设置在阻塞区域ba外,基于忽略了阻塞区域ba内的点的段(虚拟段vs),使行驶车100b进入特定区域sa,所以能够适当地控制特定区域sa的通过请求。
[0136]
在上述实施方式中,控制器200例如包含计算机系统。控制器200读出存储于存储部240的控制程序,根据读出的控制程序执行各种处理。控制程序例如使计算机执行以下操作,即、当从行驶车接收阻塞区域的通过请求时,若在阻塞区域不存在其它行驶车,则向发出了阻塞区域的通过请求的行驶车发送阻塞区域的通过许可;在使行驶车取得了阻塞区域的通过许可的情况下,使行驶车进入阻塞区域;在从行驶车接收特定区域的通过请求时,若在特定区域不存在其它行驶车,则向发出了特定区域的通过请求的行驶车发送特定区域的通过许可;在使行驶车取得了特定区域的通过许可的情况下,使行驶车进入特定区域。控制程序也可以存储于计算机可读取的存储介质而进行提供。
[0137]
另外,上述实施方式也可以在能够折返的行驶路r中实现。图33~图36是表示通过折返而通过阻塞区域的行驶车的例子的图。例如,如图33所示,对行驶路rb的目的地是终点的情况进行说明。在行驶路rb的目的地为终点的情况下,行驶车100b通过折返边后退边通过阻塞区域ba。此时,点pa成为后退的行驶车100b将行进方向切换为行驶路ra的方向的切换点(转向点)。
[0138]
行驶车100b向控制器200发送阻塞区域ba的通过请求(参照图33)。行驶车100b如从控制器200接收阻塞区域ba的通过许可,则基于点pc、点pa间的行进段,朝向作为切换点(转向点)的点pa行驶(后退)(参照图34)。行驶车100b若后退到点pa,则基于点pa、点pb间的行进段而行驶(参照图35)。行驶车100b在通过了阻塞区域ba的情况下,将所通过的阻塞区域ba的解除请求向控制器200发送(参照图36)。控制器200根据来自行驶车100b的解除请求,解除阻塞区域ba的阻塞。
[0139]
以上,虽对实施方式进行了说明,但本发明的技术范围并不限于上述实施方式。对于本领域技术人员来说,显然能够对上述实施方式进行各种变更或者改进。另外,进行了那样的变更或者改进的实施方式也包含在本发明的技术范围内。在上述实施方式等中说明的一个以上的要件有时可以省略。另外,在上述实施方式等中说明的要件,能够适当地组合。另外,在本实施方式中示出的各处理的执行顺序,只要在后面的处理中不使用前面的处理的输出,就能够以任意的顺序来实现。另外,关于上述实施方式中的动作,为了方便,即使使用“首先”、“其次”,“接着”等进行说明,但也不是必须以该顺序来实施。另外,在法律允许的范围内,引用在上述实施方式等中引用的所有文献的公开内容作为本文记载的一部分。
[0140]
此外,有时省略在上述实施方式等中说明的要件的一个以上。另外,在上述实施方式等中说明的要件能够适当地组合。另外,在法律允许的范围内,引用作为日本专利申请的特愿2020-092386以及在上述实施方式等中引用的所有文献的公开内容作为本文记载的一部分。
[0141]
附图标记的说明
[0142]
ba
…
阻塞区域、br
…
分支部、pa
…
规定区域、pa
…
点、pb
…
点、pc
…
点、r
…
行驶路、ra
…
行驶路、rb
…
行驶路、sa
…
特定区域、sys
…
行驶车系统、100
…
行驶车、200
…
控制器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1