用于运载工具的方法、系统和介质与流程
本公开涉及运载工具,尤其涉及对驾驶场景(scenario)进行模拟。
背景技术:
1、自主运载工具可以包括多个传感器,这些传感器产生与运载工具及其环境有关的传感器数据。光检测和测距(lidar)传感器可以向周围环境发射脉冲光波,并且可以使用检测器根据环境中的对象所反射的光来确定信息。类似地,无线电检测和测距(radar)传感器可以在发射器发射波之后根据环境中的对象反射的无线电波来确定对象信息。自主运载工具可以使用lidar和radar信息来穿过通过环境的路径。
技术实现思路
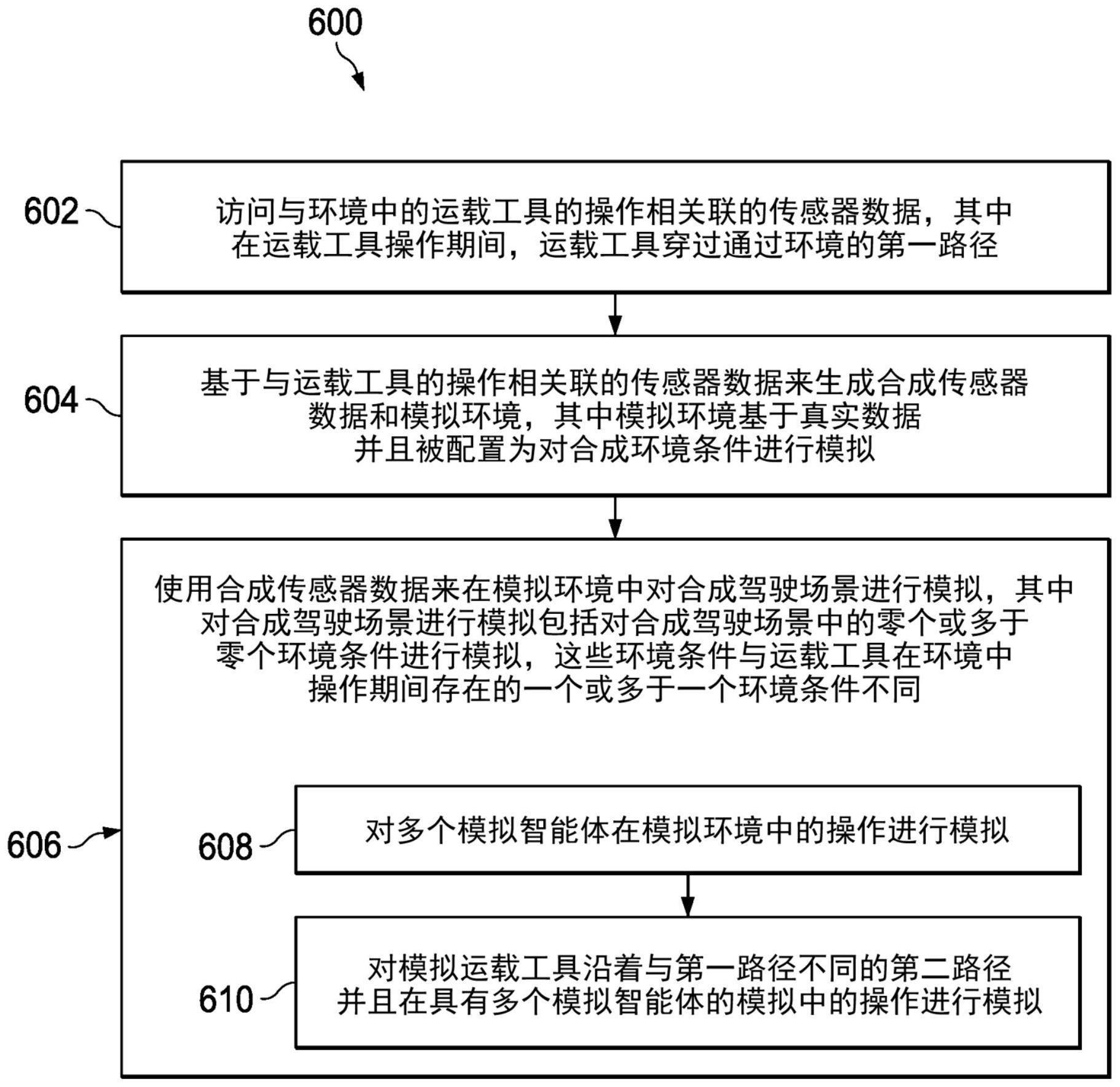
1、根据本发明的一个方面,提供一种用于运载工具的方法,包括:使用至少一个处理器来访问与运载工具在环境中的操作相关联的传感器数据,其中所述运载工具在运载工具操作期间穿过通过环境的第一路径;使用所述至少一个处理器,基于与所述运载工具的操作相关联的传感器数据来生成合成传感器数据和模拟环境,其中所述模拟环境基于真实数据并且被配置为对合成环境条件进行模拟;以及使用所述至少一个处理器和所述合成传感器数据来在所述模拟环境中对合成驾驶场景进行模拟,其中对所述合成驾驶场景进行模拟包括:对多个模拟智能体在所述模拟环境中的操作进行模拟,以及对模拟运载工具沿着与所述第一路径不同的第二路径并在具有所述多个模拟智能体的模拟中的操作进行模拟,其中,对所述合成驾驶场景进行模拟包括对所述合成驾驶场景中的零个或多于零个环境条件进行模拟,所述环境条件与所述运载工具在环境中操作期间存在的一个或多于一个环境条件不同。
2、根据本发明的另一方面,提供一种用于运载工具的系统,包括:至少一个处理器;以及至少一个计算机可读介质,其存储有指令,所述指令当由所述至少一个处理器执行时,使得所述至少一个处理器进行上述的方法。
3、根据本发明的另一方面,提供至少一个非暂时性计算机可读介质,其存储有指令,所述指令当由至少一个处理器执行时,使得所述至少一个处理器进行上述的方法。
技术特征:
1.一种用于运载工具的方法,包括:
2.根据权利要求1所述的方法,其中,对所述模拟运载工具的操作进行模拟包括使用具有所述多个模拟智能体的相同的路径。
3.根据权利要求1至2中任一项所述的方法,其中,对所述模拟运载工具的操作进行模拟包括使用没有插入智能体的不同路径。
4.根据权利要求1至3中任一项所述的方法,其中,访问与在所述运载工具穿过通过所述环境的第一路径时所述运载工具在环境中的操作相关联的传感器数据包括:
5.根据权利要求1至4中任一项所述的方法,其中,所述传感器数据包括所述运载工具的至少一个传感器所产生的图像数据和lidar数据,并且其中生成所述合成传感器数据包括生成表示所述合成驾驶场景的图像数据、lidar数据和radar数据。
6.根据权利要求1至5中任一项所述的方法,其中,生成所述合成传感器数据包括:
7.根据权利要求1至6中任一项所述的方法,其中,所述至少一个对象包括动态对象,并且其中所述表示至少一个对象的数据包括所述动态对象的运动数据,其中所述运动数据包括所述至少一个对象的轨迹数据和行人的肢体移动数据。
8.根据权利要求1至7中任一项所述的方法,其中,生成所述合成传感器数据包括:
9.根据权利要求1至8中任一项所述的方法,其中,基于所述至少一个环境条件来修改所述传感器数据包括:
10.根据权利要求1至9中任一项所述的方法,其中,修改所述传感器数据包括:
11.根据权利要求1至10中任一项所述的方法,还包括:
12.一种用于运载工具的系统,包括:
13.至少一个非暂时性计算机可读介质,其存储有指令,所述指令当由至少一个处理器执行时,使得所述至少一个处理器进行根据权利要求1至11中任一项所述的方法。
技术总结
本发明涉及用于运载工具的方法、系统和介质。提供了用于生成表示运载工具的假设的驾驶场景的高保真合成传感器数据的方法。所描述的一些方法包括访问与运载工具在环境中穿过第一路径的操作相关联的传感器数据。模拟运载工具的操作是沿着模拟环境中的合成驾驶场景沿着与第一路径不同的第二路径并且在具有多个模拟智能体的模拟中进行模拟的。还提供了系统和计算机程序产品。
技术研发人员:A·迪尔,邵云明,S·梅塔,A·扬吉德
受保护的技术使用者:动态AD有限责任公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!