卫星姿轨控半物理仿真集成化方法、系统及终端与流程
1.本发明涉及卫星仿真测试技术领域,具体地,涉及一种卫星姿轨控半物理仿真 集成化方法、系统及终端。
背景技术:
2.现有卫星姿轨控半物理仿真系统包含上位机、卫星姿轨控动力学数学模型仿真 机、卫星姿轨控接口仿真机、信号调理箱、星务计算机构成。其中姿轨控动力学数 学模型仿真机和卫星姿轨控接口仿真机为两个仿真平台,卫星姿轨控动力学模型仿 真机用于运行卫星动力学xpc数学模型,卫星姿轨控接口仿真机用于运行卫星姿轨 控单机模拟接口程序,卫星姿轨控动力学模型仿真机与卫星姿轨控接口仿真机通过 光纤或网线进行数据交互,卫星姿轨控动力学模型仿真机输出卫星敏感器和执行机 构数据到卫星姿轨控接口仿真机,卫星姿轨控接口仿真机接收数据后通过信号调理 箱与星务计算机交互单机信号。
3.姿轨控动力学数学模型仿真机和卫星姿轨控接口仿真机在信息交互过程中存 在光纤/网络传输时延,实时性无法得到保障;姿轨控动力学数学模型仿真机和卫 星姿轨控接口仿真机为两套仿真机,在研制成本上比单套仿真机高;且xpc动力学 参数运行过程中无法改变,也无法设置故障。
4.目前没有发现同本发明类似技术的说明或报道,也尚未收集到国内外类似的资 料。
技术实现要素:
5.本发明针对现有技术中存在的上述不足,提供了一种卫星姿轨控半物理仿真集 成化方法及系统。
6.根据本发明的一个方面,提供了一种卫星姿轨控半物理仿真集成化方法,包括:
7.构建卫星动力学数学模型,将所述卫星动力学数学模型中的需要设置成故障的 参数和/或信号设置为全局变量,并转换成相应的rtw格式模型;
8.将所述rtw格式模型编译封装为实时dll动力学模型;
9.将所述dll动力学模型部署至卫星姿轨控动力学仿真机,并与所述卫星姿轨控 动力学仿真机的卫星姿轨控仿真接口模块进行信号交互;
10.所述卫星姿轨控仿真接口模块输出所述dll动力学模型交互的信号,并进行调 理后传送至星务计算机;所述星务计算机传递姿轨控执行机构的信号量,并经过调 理后输出至所述卫星姿轨控仿真接口模块,完成对卫星姿轨控半物理仿真集成化。
11.可选地,所述构建卫星动力学数学模型,包括:
12.采用simulink的模型框图、stateflow的状态图和s-function模型,组成mdl 格式的卫星动力学数学模型。
13.可选地,所述转换成相应的rtw格式模型,包括:
14.通过matlab/rtw自动代码生成工具,将所述全局变量转换成rtw格式的程序 代
码,形成rtw格式模型。
15.可选地,所述将所述rtw格式模型编译封装为实时dll动力学模型,包括:
16.利用niveristand.tlc编译控制文件,将所述rtw格式模型编译封装成实时dll 动力学模型;其中,所述dll动力学模型包括:用于根据任务和工作模式实时解算 卫星在轨指向信息的卫星动力学模型和用于根据设置的参数实时改变动力学参数 从而实时改变卫星在轨状态信息的故障模型。
17.可选地,所述将所述dll动力学模型部署至卫星姿轨控动力学仿真机,包括:
18.将编译好的所述dll动力学模型嵌入至卫星姿轨控动力学仿真机的labview rt 仿真程序中,通过姿轨控上位机部署到卫星姿轨控动力学仿真机。
19.可选地,所述dll动力学模型与所述卫星姿轨控动力学仿真机的卫星姿轨控仿 真接口模块进行信号交互,包括:
20.所述dll动力学模型包括:卫星环境模型、姿态运动学和动力学模型、轨道动 力学模型、敏感器模型、执行机构模型和故障模拟软注入模型;其中,所述敏感器 模型、执行机构模型以及故障模拟软注入模型分别与所述卫星姿轨控仿真接口模块 进行数据交互;所述卫星环境模型、姿态运动学和动力学模型以及轨道动力学模型 通过得到的交互信息实时解算卫星姿态信息,并反应至所述敏感器模型和所述执行 机构模型。
21.可选地,所述卫星姿轨控仿真接口模块输出所述dll动力学模型交互的信号, 并进行调理后传送至星务计算机;所述星务计算机传递姿轨控执行机构的信号量, 并经过调理后输出至所述卫星姿轨控仿真接口模块,包括:
22.所述卫星姿轨控仿真接口模块输出所述敏感器模型和所述执行机构模型的真 实电信号,并经过信号调理箱隔离调理后与星务计算机连接;
23.所述信号调理箱接收来自所述星务计算机传递的所述执行机构模型的信号量, 经过调理后,传送至所述卫星姿轨控仿真接口模块中。
24.根据本发明的另一个方面,提供了一种卫星姿轨控半物理仿真集成化系统,包 括:模型构建模块、姿轨控动力学仿真机、信号隔离调理箱以及姿轨控上位机,其 中:
25.所述模型构建模块,用于构建卫星动力学数学模型,将所述卫星动力学数学模 型中的需要设置成故障的参数和/或信号设置为全局变量,并转换成相应的rtw格 式模型;将所述rtw格式模型编译封装为实时dll动力学模型;
26.所述姿轨控动力学仿真机,部署有所述dll动力学模型,并设有卫星姿轨控仿 真接口模块,通过所述卫星姿轨控仿真接口模块与所述dll动力学模型进行信号交 互后,通过所述信号隔离调理箱进行信号调理后输出至所述星务计算机;接收所述 星务计算机的姿轨控执行信号;
27.所述姿轨控上位机,用于部署所述dll动力学模型和所述卫星姿轨控仿真接口 模块至所述姿轨控动力学仿真机,并对所述卫星姿轨控仿真接口模块与所述姿轨控 动力学仿真机交互的信号进行数据显示和存储;
28.所述信号隔离调理箱,用于对接收的信号进行隔离调理。
29.根据本发明的第三个方面,提供了一种终端,包括存储器、处理器及存储在存 储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时可用于执行 上述任一项所述的方法。
30.由于采用了上述技术方案,本发明与现有技术相比,具有如下至少一项的有益 效果:
31.本发明提供的卫星姿轨控半物理仿真集成化方法、系统及终端,是一套实时仿 真测试平台系统,可以分别模拟卫星轨道、姿态动力学、卫星在轨运行环境、姿态 敏感器、执行机构等,并能够实现各单机的电性能接口模拟,与卫星星务计算机直 接连接,在姿轨控单机尚未齐全时即可实现测试系统的硬件在回路实时闭环仿真。
32.本发明提供的卫星姿轨控半物理仿真集成化方法、系统及终端,结合各种实时 仿真软件,去除姿轨控动力学模型仿真机,将动力学模型内嵌至原姿轨控接口仿真 机(即本发明的卫星姿轨控动力学仿真机的卫星姿轨控仿真接口模块),使卫星姿 轨控半物理仿真系统集成为同一平台,在实时性、可靠性和仿真平台成本等各方面 可以有较大改善。
33.本发明提供的卫星姿轨控半物理仿真集成化方法及系统,可以实现姿轨控动力 学所有参数的在线修改,故障参数可设置,提高了测试覆盖性。
附图说明
34.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、 目的和优点将会变得更明显:
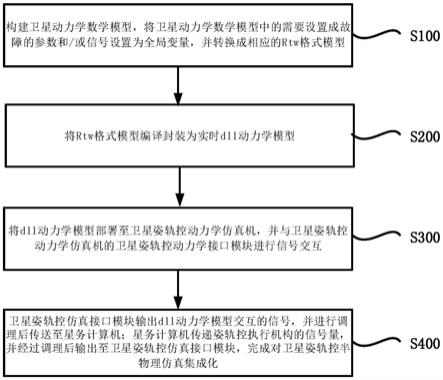
35.图1为本发明一实施例中卫星姿轨控半物理仿真集成化方法的工作流程图。
36.图2为本发明一优选实施例中生成rtw格式模型的工作流程图。
37.图3为本发明一优选实施例中构建dll动力学模型的工作流程图。
38.图4为本发明一优选实施例中卫星姿轨控动力学仿真机的工作示意图。
39.图5为本发明一优选实施例中卫星姿轨控动力学仿真机与星务计算机之间的工 作示意图。
40.图6为本发明一实施例中卫星姿轨控半物理仿真集成化系统的结构示意图。
具体实施方式
41.下面对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实 施,给出了详细的实施方式和具体的操作过程。应当指出的是,对本领域的普通技术人 员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发 明的保护范围。
42.图1为本发明一实施例提供的卫星姿轨控半物理仿真集成化方法的工作流程图。
43.如图1所示,该实施例提供的卫星姿轨控半物理仿真集成化方法,可以包括如 下步骤:
44.s100,构建卫星动力学数学模型,将卫星动力学数学模型中的需要设置成故障 的参数和/或信号设置为全局变量,并转换成相应的rtw格式模型;
45.s200,将rtw格式模型编译封装为实时dll动力学模型;
46.s300,将dll动力学模型部署至卫星姿轨控动力学仿真机,并与卫星姿轨控动 力学仿真机的卫星姿轨控动力学接口模块进行信号交互;
47.s400,卫星姿轨控仿真接口模块输出dll动力学模型交互的信号,并进行调理 后传送至星务计算机;星务计算机传递姿轨控执行机构的信号量,并经过调理后输 出至卫星
并经过信号调理箱隔离调理后与星务计算机连接;
66.s402,信号调理箱接收来自星务计算机传递的执行机构模型的信号量,经过调 理后,传送至卫星姿轨控仿真接口模块中。
67.下面结合附图,对本发明上述实施例提供的卫星姿轨控半物理仿真集成化方法 进一步说明如下。
68.本发明上述实施例提供的卫星姿轨控半物理仿真集成化方法,主要包括如下四 个步骤:
69.步骤一,构建卫星动力学数学模型,将卫星动力学数学模型中的需要设置成故 障的参数和/或信号设置为全局变量,并转换成相应的rtw格式模型;
70.步骤二,将rtw格式模型编译封装为实时dll动力学模型;
71.步骤三,将dll动力学模型部署至卫星姿轨控动力学仿真机,并与卫星姿轨控 动力学仿真机的卫星姿轨控仿真接口模块进行信号交互;
72.步骤四,卫星姿轨控仿真接口模块输出dll动力学模型交互的信号,并进行调 理后传送至星务计算机;星务计算机传递姿轨控执行机构的信号量,并经过调理后 输出至卫星姿轨控仿真接口模块,完成对卫星姿轨控半物理仿真集成化。
73.如图2所示,步骤一具体为:
74.根据卫星动力学数学模型,动力学数学模型由simulink的模型框图、stateflow 的状态图和s-function组成的mdl格式模型,将模型中的需要设置成故障的参数 或信号设置为全局变量,通过matlab/rtw自动代码生成工具转换成高效优化的程 序代码,格式为rtw格式。
75.如图3所示,步骤二具体为:
76.利用niveristand.tlc编译控制文件,将rtw动力学数学模型编译封装成实时 dll动力学模型,该模型包含卫星动力学模型:根据任务和工作模式实时解算卫星 在轨指向信息;故障模型:根据设置的参数实时改变动力学参数,从而实时改变卫 星在轨状态信息
77.如图4所示,步骤三具体为:
78.将编译好的dll格式的卫星动力学模型嵌入至卫星姿轨控动力学仿真机的 labview rt仿真程序,通过姿轨控上位机快速部署到卫星姿轨控动力学仿真机,卫 星动力学模型与卫星姿轨控动力学仿真机在labview rt仿真程序里信号交互,dll 动力学模型中:敏感器模型、执行机构模型以及故障模拟软注入模型分别与卫星姿 轨控仿真接口模块进行数据交互;卫星环境模型、姿态运动学和动力学模型以及轨 道动力学模型通过得到的交互信息实时解算卫星姿态信息,并反应至敏感器模型和 所述执行机构模型。
79.如图5所示,步骤四具体为:
80.步骤四:卫星姿轨控仿真接口模块输出的敏感器模型和执行机构模型的真实电 信号经过信号调理箱隔离调理后通过电缆与星务计算机连接,信号隔离调理箱接收 来自卫星姿轨控动力学仿真机中的真实信号,经过调理箱内部的隔离模块把接收到 的真实信号调理后输出至星务计算机。同时信号隔离调理箱还接受来自星务计算机 传递的执行机构模型的信号量,经过调理后,传送至卫星姿轨控仿真接口模块中;
81.本发明上述实施例提供的卫星姿轨控半物理仿真集成化方法,结合各种实时仿 真软件,去除姿轨控动力学仿真机,将动力学模型内嵌至原姿轨控接口仿真机,使 卫星姿
轨控半物理仿真系统集成为同一平台。通过此方法,可以在实时性、可靠性 和仿真平台成本各方面有较大改善,另外可以使姿轨控动力学所有参数可在线修改, 故障参数可设置,提高了测试覆盖性。
82.图6为本发明一实施例提供的卫星姿轨控半物理仿真集成化系统的组成结构示 意图。
83.如图6所示,该实施例提供的卫星姿轨控半物理仿真集成化系统,可以包括: 模型构建模块、姿轨控动力学仿真机、信号隔离调理箱以及姿轨控上位机,其中:
84.模型构建模块,用于构建卫星动力学数学模型,将卫星动力学数学模型中的需 要设置成故障的参数和/或信号设置为全局变量,并转换成相应的rtw格式模型; 将rtw格式模型编译封装为实时dll动力学模型;
85.姿轨控动力学仿真机,部署有dll动力学模型,并设有卫星姿轨控仿真接口模 块,通过卫星姿轨控仿真接口模块与dll动力学模型进行信号交互后,通过信号隔 离调理箱进行信号调理后输出至星务计算机;接收星务计算机的姿轨控执行信号;
86.姿轨控上位机,用于部署dll动力学模型和卫星姿轨控仿真接口模块至姿轨控 动力学仿真机,并对卫星姿轨控仿真接口模块与姿轨控动力学仿真机交互的信号进 行数据显示和存储;
87.信号隔离调理箱,用于对接收的信号进行隔离调理。
88.本发明一实施例还提供了一种终端,包括存储器、处理器及存储在存储器上并 可在处理器上运行的计算机程序,所述处理器执行所述程序时可用于执行本发明上 述实施例中任一项所述的方法。
89.本发明上述实施例提供的卫星姿轨控半物理仿真集成化系统,采用“卫星动力 学数学模型算法内核(.dll文件)+ni labview real-time单机接口实时仿真机
”ꢀ
的架构,将整个系统搭建为一个集成式实时快速仿真测试平台系统。
90.本发明上述实施例提供的卫星姿轨控半物理仿真集成化系统,包括4个主要功 能模块,分别为:模型构建模块、姿轨控动力学仿真机、信号隔离调理箱、姿轨控 上位机。姿轨控上位机通过网络管理姿轨控动力学仿真机,实现远程控制,对程序 进行编译,下载、数据监视、数据存储等功能。姿轨控动力学仿真机运行姿轨控动 力学模型实时解算卫星姿态信息,模拟姿态敏感器、执行机构电信号。信号调理箱 对姿轨控动力学仿真机电信号进行调理后直接与星务计算机通信。基于此,该系统 可以方便的完成姿轨控快速原型仿真。
91.本发明上述实施例提供的卫星姿轨控半物理仿真集成化方法及系统,可以分别 模拟卫星轨道、姿态动力学、卫星在轨运行环境、姿态敏感器、执行机构等,并能 够实现各单机的电性能接口模拟,与卫星星务计算机直接连接,在姿轨控单机尚未 齐全时即可实现测试系统的硬件在回路实时闭环仿真;结合各种实时仿真软件,去 除姿轨控动力学仿真机,将动力学模型内嵌至原姿轨控接口仿真机,使卫星姿轨控 半物理仿真系统集成为同一平台,在实时性、可靠性和仿真平台成本等各方面可以 有较大改善;可以实现姿轨控动力学所有参数的在线修改,故障参数可设置,提高 了测试覆盖性。
92.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系 统及其各个装置以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的 系统及其各个装置以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式 微控制器等
的形式来实现相同功能。所以,本发明提供的系统及其各项装置可以被 认为是一种硬件部件,而对其内包括的用于实现各种功能的装置也可以视为硬件部 件内的结构;也可以将用于实现各种功能的装置视为既可以是实现方法的软件模块 又可以是硬件部件内的结构。
93.本发明上述实施例中未尽事宜均为本领域公知技术。
94.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上 述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改, 这并不影响本发明的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1