一种导线修补机器人的控制电路的制作方法
1.本发明涉及输电导线修补技术领域,具体涉及一种导线修补机器人的控制电路。
背景技术:
2.输电线路主要承担电能输送任务,是国家电网的重要组成部分。由于输电线路架设面积广,途经地区的地形和气候复杂多变,因而在外界环境的长时间影响下,输电导线容易产生导线断股、导线破损等故障。
3.目前,在进行导线修补时,一般都是由无人机进行输电导线断点的识别,然后获取断点位置后,由人工进行修补,安全性较低,而且效率低下,虽然也有采用导线修补机器人进行导线修补的方式,但是由于对导线修补机器人的控制效果不佳,导致导线修补机器人无法较好的实现导线修补。
技术实现要素:
4.本发明的目的在于克服上述技术不足,提供一种导线修补机器人的控制电路,解决现有技术中导线修补机器人的控制效果不佳的技术问题。
5.为达到上述技术目的,本发明采取了以下技术方案:
6.一种导线修补机器人的控制电路,包括中央处理电路、姿态检测电路、摄像头、以太网电路、can电路、模拟量输入输出电路和数字量输入输出电路,所述摄像头通过以太网电路连接所述中央处理电路,所述姿态检测电路、can电路、模拟量输入输出电路和数字量输入输出电路均连接所述中央处理电路;
7.所述姿态检测电路用于检测导线修补机器人的姿态信息后,将所述姿态信息发送给所述中央处理电路;
8.所述摄像头用于拍摄待修补导线的图像,并通过所述以太网电路发送给所述中央处理电路;
9.所述can电路用于实现can通信;
10.所述模拟量输入输出电路用于输入模拟信号至所述中央处理电路或将所述中央处理电路输出的模拟信号输出给导线修补机器人的驱动部;
11.所述数字量输入输出电路用于输入数字信号至所述中央处理电路或将所述中央处理电路输出的数字信号输出给导线修补机器人的驱动部;
12.所述中央处理电路用于根据所述姿态信息和图像,发出数字信号和/或模拟信号。
13.优选的,所述的导线修补机器人的控制电路中,所述中央处理电路包括型号为stm32f407zgt6的主控芯片,所述主控芯片的rs232_txd_3端和rs232_rxd_3端均连接所述姿态检测电路,所述主控芯片的eth_rmii_ref_clk端、eth_mdio端、eth_mdc端、eth_reset端、eth_rmii_tx_en端、eth_rmii_txd0端、eth_rmii_txd1端、eth_rmii_crsdv端、eth_rmii_rxd0端和eth_rmii_rxd1端均连接所述以太网电路,所述主控芯片的can_txd_1端和can_rxd_1端均连接所述can电路,所述主控芯片通过若干个gpio口连接所述数字量输入输
出电路,所述主控芯片的gpio_pwm1端、gpio_pwm2端、gpio_en1端、gpio_en2端、gpio_dir1端和gpio_dir2端均连接所述模拟量输入输出电路。
14.优选的,所述的导线修补机器人的控制电路中,所述姿态检测电路包括姿态检测传感器,所述姿态检测传感器的rx端连接所述主控芯片的rs232_rxd_3端,所述姿态检测传感器的tx端连接所述主控芯片的rs232_txd_3端。
15.优选的,所述的导线修补机器人的控制电路中,所述姿态检测传感器采用型号为mpu6050mudule的六轴陀螺仪。
16.优选的,所述的导线修补机器人的控制电路中,所述摄像头为模拟摄像头或红外摄像头。
17.优选的,所述的导线修补机器人的控制电路中,所述以太网电路包括以太网芯片、第一电阻以及第一电容,所述以太网芯片的reset_n端连接所述第一电阻的一端和第一电容的一端,所述第一电容的另一端接地,所述第一电阻的另一端连接供电电源,所述以太网芯片的x1端、mdio端、mdc端、reset_n端、tx_en端、txd_0端、txd_1端、crs端、rxd_0端和rxd_1端分别连接所述主控芯片的eth_rmii_ref_clk端、eth_mdio端、eth_mdc端、eth_reset端、eth_rmii_tx_en端、eth_rmii_txd0端、eth_rmii_txd1端、eth_rmii_crsdv端、eth_rmii_rxd0端和eth_rmii_rxd1端。
18.优选的,所述的导线修补机器人的控制电路中,所述can电路包括can通信芯片、第二电容、第三电容、第四电容、第二电阻、第三电阻、esd静电保护二极管和双极性晶体管,所述can通信芯片的txd端和rxd端分别连接所述主控芯片的can_txd_1端和can_rxd_1端,所述can通信芯片的canl端连接所述第二电容的一端、双极性晶体管的一端、esd静电保护二极管的第2端、第三电阻的一端以及can总线,所述can通信芯片的canh端连接所述第三电容的一端、双极性晶体管的另一端、esd静电保护二极管的第1端、第三电阻的另一端以及can总线,所述can通信芯片的cang端连接所述第二电容的另一端、esd静电保护二极管的第3端、第二电阻的一端、第四电容的一端和接地端,所述第二电阻的另一端和第四电容的另一端均连接can总线和接地端,所述第三电容的另一端接地。
19.优选的,所述的导线修补机器人的控制电路中,所述数字量输入电路包括若干个第一电平转换芯片,若干个所述第一电平转换芯片的a1端至a8端分别通过所述主控芯片的一gpio口连接所述主控芯片。
20.优选的,所述的导线修补机器人的控制电路中,所述模拟量输入输出电路包括第二电平转换芯片,所述第二电平转换芯片的a1端至a6端分别连接所述主控芯片的gpio_pwm1端、gpio_pwm2端、gpio_en1端、gpio_en2端、gpio_dir1端和gpio_dir2端。
21.优选的,所述的导线修补机器人的控制电路中,所述第一电平转换芯片和第二电平转换芯片的型号均为sn74lvcc3245adbr。
22.与现有技术相比,本发明提供的导线修补机器人的控制电路,通过设置中央处理电路、姿态检测电路、摄像头、以太网电路、can电路、模拟量输入输出电路和数字量输入输出电路,利用姿态检测电路检测导线修补机器人的姿态,利用摄像头拍摄待修补导线的图像,然后中央处理电路根据姿态和图像来输出信号控制导线修补机器人的驱动部动作,进而能够驱动导线修补机器人正确的实现导线修补,保证导线修补机器人控制的稳定性,通过以太网电路和can电路,可以实现导线修补机器人的无线通讯,进而可以进一步方便实现
导线修补机器人的远程控制。
附图说明
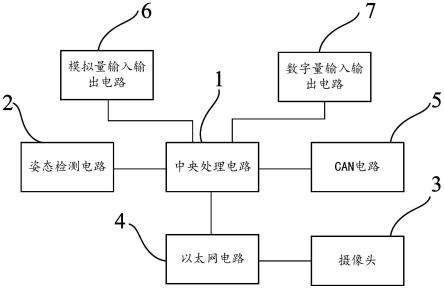
23.图1是本发明提供的导线修补机器人的控制电路的一较佳实施例的原理图;
24.图2是本发明提供的导线修补机器人的控制电路中,所述中央处理电路的一较佳实施例的原理图;
25.图3是本发明提供的导线修补机器人的控制电路中,所述姿态检测电路的一较佳实施例的原理图;
26.图4是本发明提供的导线修补机器人的控制电路中,所述以太网电路的一较佳实施例的原理图;
27.图5是本发明提供的导线修补机器人的控制电路中,所述can电路的一较佳实施例的原理图;
28.图6是本发明提供的导线修补机器人的控制电路中,所述数字量输入输出电路的一较佳实施例的原理图;
29.图7是本发明提供的导线修补机器人的控制电路中,所述模拟量输入输出电路的一较佳实施例的原理图。
具体实施方式
30.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
31.请参阅图1,本发明实施例提供的导线修补机器人的控制电路,包括中央处理电路1、姿态检测电路2、摄像头3、以太网电路4、can电路5、模拟量输入输出电路6和数字量输入输出电路7,所述摄像头3通过以太网电路4连接所述中央处理电路1,所述姿态检测电路2、can电路5、模拟量输入输出电路6和数字量输入输出电路7均连接所述中央处理电路1。
32.本实施例中,所述姿态检测电路2用于检测导线修补机器人的姿态信息后,将所述姿态信息发送给所述中央处理电路1;所述摄像头3用于拍摄待修补导线的图像,并通过所述以太网电路4发送给所述中央处理电路1;所述can电路5用于实现can通信,此外所述以太网电路4还用于实现所述中央处理电路1与外部人机交互系统的人机通信;所述模拟量输入输出电路6用于输入模拟信号至所述中央处理电路1或将所述中央处理电路1输出的模拟信号输出给导线修补机器人的驱动部;所述数字量输入输出电路7用于输入数字信号至所述中央处理电路1或将所述中央处理电路1输出的数字信号输出给导线修补机器人的驱动部;所述中央处理电路1用于根据所述姿态信息和图像,发出数字信号和/或模拟信号。
33.在具体实施时,首先由中央处理电路1通过以太网电路4接收外部人机交互系统发送的控制指令,开始工作,此时摄像头3和姿态检测电路2同时工作,摄像头3拍摄待修补导线的图像,姿态检测电路2检测导线修补机器人的姿态,然后发送给所述中央处理电路1,中央处理电路1根据图像和姿态信息,发出模拟信号和/或数字信号至所述导线修补机器人的驱动部,例如发送模拟信号给行走轮驱动器、夹爪驱动器、手臂伸缩驱动器、纵向旋转驱动器、水平旋转驱动器、轮盘平移驱动器、缠绕修补驱动器、预绞丝切断驱动器、捋线纵移驱动
器等等,发送数字信号至机箱散热风扇等等,使导线修补机器人按照预设的控制方式来进行工作,从而完成导线修补。
34.本实施例中,通过设置中央处理电路1、姿态检测电路2、摄像头3、以太网电路4、can电路5、模拟量输入输出电路6和数字量输入输出电路7,利用姿态检测电路2检测导线修补机器人的姿态,利用摄像头3拍摄待修补导线的图像,然后中央处理电路1根据姿态和图像来输出信号控制导线修补机器人的驱动部动作,进而能够驱动导线修补机器人正确的实现导线修补,保证导线修补机器人控制的稳定性,通过以太网电路4和can电路5,可以实现导线修补机器人的无线通讯,进而可以进一步方便实现导线修补机器人的远程控制。
35.在一些实施例中,所述中央处理电路包括型号为stm32f407zgt6的主控芯片u1,所述主控芯片u1是机器人本体机箱内部硬件系统核心,向上与地面控制端相连,机器人运行过程中实时解析处理控制指令、上传传感器状态信息和各关节运动量。向下控制机器人本体所有电子器件和设备,通过can总线协议向电机驱动控制器发送控制命令,结合关节机械传动机构,使作业机械臂运动到指定位置和角度,并对机器人本体电源电量、姿态角度、关节运动限位传感器和机箱内温度等运行辅助信息进行采样监控。所述主控芯片u1内置有姿态倾角传感器数据读取电路、rs485通讯扩展接口、can总线数据收发电路、以太网通讯电路、电源电量检测电路、电压变换电路、输入检测/输出控制和程序调试端口等。主控制板通过rs485向视频图像处理器发送指令,采样模拟摄像机数据并转换成数字信号,经过交换机和无线网桥传输至地面人-机交互系统,作为视觉检测和目标点位置测量算法的输入数据;通过can总线与各关节驱动电机相对应驱动控制器相连,配合canopen通信协议下达驱动器控制指令,进而控制电机运动和实时获取电机运行电压、电流和转速等信息,can总线具有抗电磁干扰能力强、实时性高和数据帧纠错能力强等优点;电源电量检测adc采用隔离式电压采样电路,防止电机输出高扭矩时电源波动损坏主控制芯片,实现电源供给系统欠压和过流保护;同时,主控板还有用于位置限制传感器电平检测的16路隔离输入和继电器以及指示灯状态切换等其他辅助设备控制的16路隔离输出。
36.优选的,请参阅图2,所述主控芯片u1的rs232_txd_3端和rs232_rxd_3端均连接所述姿态检测电路2,所述主控芯片u1的eth_rmii_ref_clk端、eth_mdio端、eth_mdc端、eth_reset端、eth_rmii_tx_en端、eth_rmii_txd0端、eth_rmii_txd1端、eth_rmii_crsdv端、eth_rmii_rxd0端和eth_rmii_rxd1端均连接所述以太网电路4,所述主控芯片u1的can_txd_1端和can_rxd_1端均连接所述can电路5,所述主控芯片u1通过若干个gpio口连接所述数字量输入输出电路7,所述主控芯片u1的gpio_pwm1端、gpio_pwm2端、gpio_en1端、gpio_en2端、gpio_dir1端和gpio_dir2端均连接所述模拟量输入输出电路6。
37.在一些实施例中,请参阅图3,所述姿态检测电路2包括姿态检测传感器u2,所述姿态检测传感器u2的rx端连接所述主控芯片u1的rs232_rxd_3端,所述姿态检测传感器u2的tx端连接所述主控芯片u1的rs232_txd_3端。
38.本实施例中,所述姿态检测传感器u2采用型号为mpu6050mudule的六轴陀螺仪,它集成了3轴mems陀螺仪,3轴mems加速度计,以及一个可扩展的数字运动处理器dmp,可以同时检测三轴加速度、三轴陀螺仪(三轴角速度)及温度,可以用到平衡车、四轴飞行器、手机、运动手环等等设备之中,其中的三维坐标方向为三轴加速度方向,在三维坐标的各个方向形成的自转的为各个方向的角速度,组成三轴陀螺仪(角速度)的表示。本发明实施例通过
设置六轴陀螺仪,可以准确的检测出导线修补机器人的姿态,进而可以精准的对导线修补机器人进行控制。
39.在一些实施例中,所述摄像头为模拟摄像头或红外摄像头,当然亦可以同时设置模拟摄像头以及红外摄像头,以保证能够在任意环境下都能够采集到待修补导线的图像,进而可以保证导线修补的准确度。
40.在一些实施例中,请参阅图4,所述以太网电路4包括以太网芯片u3、第一电阻r1以及第一电容c1,所述以太网芯片u3的reset_n端连接所述第一电阻r1的一端和第一电容c1的一端,所述第一电容c1的另一端接地,所述第一电阻r1的另一端连接供电电源,所述以太网芯片u3的x1端、mdio端、mdc端、reset_n端、tx_en端、txd_0端、txd_1端、crs端、rxd_0端和rxd_1端分别连接所述主控芯片u1的eth_rmii_ref_clk端、eth_mdio端、eth_mdc端、eth_reset端、eth_rmii_tx_en端、eth_rmii_txd0端、eth_rmii_txd1端、eth_rmii_crsdv端、eth_rmii_rxd0端和eth_rmii_rxd1端。
41.本实施例中,所述以太网芯片u3采用型号为dp83848i_pt_48的芯片,可以较好的实现以太网通信,进而保证主控芯片u1可以较好的与外部人机交互系统进行交互,也可以保证摄像头采集的图像可以实时发送给所述主控芯片u1。当然,在其它的实施例中,所述以太网芯片u3还可采用其它型号的芯片,本发明对此不做限定。
42.在一些实施例中,请参阅图5,所述can电路5包括can通信芯片u4、第二电容c2、第三电容c3、第四电容c4、第二电阻r2、第三电阻r3、esd静电保护二极管t1和双极性晶体管d1,所述can通信芯片u4的txd端和rxd端分别连接所述主控芯片u1的can_txd_1端和can_rxd_1端,所述can通信芯片u4的canl端连接所述第二电容c2的一端、双极性晶体管d1的一端、esd静电保护二极管t1的第2端、第三电阻r3的一端以及can总线,所述can通信芯片u4的canh端连接所述第三电容c3的一端、双极性晶体管d1的另一端、esd静电保护二极管t1的第1端、第三电阻r3的另一端以及can总线,所述can通信芯片u4的cang端连接所述第二电容c2的另一端、esd静电保护二极管t1的第3端、第二电阻r2的一端、第四电容c4的一端和接地端,所述第二电阻r2的另一端和第四电容c4的另一端均连接can总线和接地端,所述第三电容c3的另一端接地。
43.本实施例中,所述can通信芯片u4的型号为ctm 8251at,ctm 8251t是一款带隔离的通用can收发器芯片,该芯片内部集成了所有必需的can隔离及can收、发器件,这些都被集成在不到3平方厘米的芯片上。芯片的主要功能是将can控制器的逻辑平转换为can总线的差分电平并且具有dc 2500v的隔离功能。本发明实施例通过设置can电路5,简化了电路结构,系统采用can总线将所有的驱动器与主控制器连接,整个电路系统组成一个can总线网络,不工作的驱动器处于低功耗状态。
44.在一些实施例中,请参阅图6,所述数字量输入电路7包括若干个第一电平转换芯片u5,若干个所述第一电平转换芯片u5的a1端至a8端分别通过所述主控芯片u1的一gpio口连接所述主控芯片u1。
45.本实施例中,所述第一电平转换芯片的型号为sn74lvcc3245adbr。
46.在一些实施例中,请参阅图7,所述模拟量输入输出电路6包括第二电平转换芯片u6,所述第二电平转换芯片u6的a1端至a6端分别连接所述主控芯片u1的gpio_pwm1端、gpio_pwm2端、gpio_en1端、gpio_en2端、gpio_dir1端和gpio_dir2端。
47.本实施例中,所述第二电平转换芯片的型号为sn74lvcc3245adbr。
48.综上所述,本发明提供的导线修补机器人的控制电路,通过设置中央处理电路、姿态检测电路、摄像头、以太网电路、can电路、模拟量输入输出电路和数字量输入输出电路,利用姿态检测电路检测导线修补机器人的姿态,利用摄像头拍摄待修补导线的图像,然后中央处理电路根据姿态和图像来输出信号控制导线修补机器人的驱动部动作,进而能够驱动导线修补机器人正确的实现导线修补,保证导线修补机器人控制的稳定性,通过以太网电路和can电路,可以实现导线修补机器人的无线通讯,进而可以进一步方便实现导线修补机器人的远程控制。
49.以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1