控制器、控制方法以及计算机可读取记录介质与流程
1.本发明涉及控制器、控制方法以及计算机可读取记录介质。
背景技术:
2.提出了利用学习完毕模型的控制器的方案(例如参照专利文献1)。
3.专利文献1:日本特开2018-202564号公报
4.基于特定的控制对象以及特定的目标设定值的条件而学习例如用于过程控制的学习完毕模型。关于这种学习完毕模型,如果条件不同则无法进行适当的控制,因此通用性、实用性有所欠缺。
技术实现要素:
5.本发明的目的在于提高学习完毕模型的通用性、实用性。
6.一个方面所涉及的控制器具有:获取部,其获取实际的控制对象的过程数据;以及计算部,其基于实际的控制对象的目标设定值以及参数中的至少一者而对由获取部获取的过程数据进行变换,利用变换后的过程数据以及学习完毕模型而对实际的控制对象的操作量进行计算,学习完毕模型如果被输入特定的控制对象的过程数据,则输出用于使特定的控制对象的过程数据接近特定的目标设定值的操作量,参数包含用于确定实际的控制对象的操作量、与通过该操作量而获得的过程数据的关系的参数。
7.一个方面所涉及的控制方法包含如下步骤:获取实际的控制对象的过程数据;以及基于实际的控制对象的目标设定值以及参数中的至少一者对所获取的过程数据进行变换,利用变换后的过程数据以及学习完毕模型对实际的控制对象的操作量进行计算,学习完毕模型如果被输入特定的控制对象的过程数据,则输出用于使特定的控制对象的过程数据接近特定的目标设定值的操作量,参数包含用于确定实际的控制对象的操作量、与通过该操作量而获得的过程数据的关系的参数。
8.一个方面所涉及的计算机可读取记录介质对控制程序进行记录,控制程序使计算机执行如下处理:获取实际的控制对象的过程数据;以及基于实际的控制对象的目标设定值以及参数中的至少一者对所获取的过程数据进行变换,利用变换后的过程数据以及学习完毕模型对实际的控制对象的操作量进行计算,学习完毕模型如果被输入特定的控制对象的过程数据,则输出用于使特定的控制对象的过程数据接近特定的目标设定值的操作量,参数包含用于确定实际的控制对象的操作量、与通过该操作量而获得的过程数据的关系的参数。
9.发明的效果
10.根据本发明,能够提高学习完毕模型的通用性、实用性。
附图说明
11.图1是表示实施方式所涉及的控制器的概略结构的例子的图。
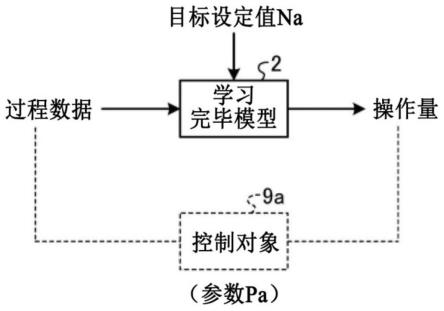
12.图2是示意性地表示学习完毕模型的学习的例子的图。
13.图3是示意性地表示学习完毕模型的概略结构的例子的图。
14.图4是表示操作变更量的决定的例子的图。
15.图5是表示ai控制器的概略结构的例子的图。
16.图6是示意性地表示基于映射函数的映射的例子的图。
17.图7是表示控制器中执行的处理的例子的流程图。
18.图8是表示变形例所涉及的控制器的概略结构的例子的图。
19.图9是表示控制器的硬件结构的例子的图。
具体实施方式
20.下面,参照附图对实施方式进行说明。对相同的要素标注相同的标号并适当地省略重复的说明。
21.图1是表示实施方式所涉及的控制器的概略结构的例子的图。控制器1对控制对象9进行控制。控制的例子是工厂的过程控制等,在该情况下,过程控制所涉及的各种控制对象可以设为控制对象9。举例所示的控制器1包含学习完毕模型2以及ai控制器3。
22.控制器1获取控制对象9的过程数据x,对使得过程数据x接近目标设定值n的操作量mv进行计算。对控制对象9赋予计算出的操作量mv,对控制对象9进行控制。
23.对过程数据x以及操作量mv的几个例子进行叙述。例如,在控制对象9是水槽等的情况下,过程数据x可以是液面水位等。容器内的液体的液位(水位)、管中流动的流体的流量等也可以是过程数据x。操作量mv可以是阀的开度、旋转量、移动量等。在控制对象9是炉等的情况下,过程数据x可以是炉的(例如整体的)温度等。操作量mv也可以是针对电热线的电流值等。
24.此外,操作量mv可以是操作量的绝对值,也可以是针对当前时刻的操作量的变更量(操作变更量)。还参照图2~图4对学习完毕模型2进行说明。
25.图2是示意性地表示学习完毕模型的学习的例子的图。学习完毕模型2是以如下方式学习(生成)的ai控制模型,即,如果输入特定的控制对象9a的过程数据,则输出用于使控制对象9a的过程数据接近特定的目标设定值na的操作量。此外,图中的参数pa是控制对象9a的参数。后文中再次对参数进行说明。
26.图3是示意性地表示学习完毕模型的概略结构的例子的图。在学习完毕模型2中保存有针对当前的过程状态而决定用于接近目标设定值na的控制所需的控制对象9a的操作量的策略。具体而言,学习完毕模型2保有多个样本数据。在该例子中,与“特征数据”、“操作变更量”以及“权重”建立关联地对多个样本数据分别进行记述。
[0027]“特征数据”表示控制对象9a的过程的状态(例如水位、阀开度等)。1个样本数据可以包含多个特征数据,附图中作为“state_1”以及“state_2”等而示意性地示出了这些特征数据。“操作变更量”(action)是根据该时刻的过程的状态而进行的对控制对象9a的操作变更量。“权重”(weight)表示对于特征数据和操作变更量的组合的评价。
[0028]
对于如上所述的学习完毕模型2的生成,可以使用kdpp(kernel dynamic policy programming)等已知的强化学习算法。利用学习完毕模型2而决定针对当前的过程状态的最佳的操作变更量。参照图4对具体例进行说明。
[0029]
图4是表示操作变更量的决定的例子的图。特征数据中的state_1是容器的水位,其值为20。state_2是阀的开度,其值为40。作为对应的操作变更量,作为选项而存在-3、-1、0、1以及3。针对每个选项(每行)例如在上述的图3所示的各样本数据(除了权重的列以外)之间进行内核计算,乘以权重并进行加法运算,由此求出作为选项而赋予的操作变更量各自的评价值。将评价值最高的操作变更量决定为接下来的操作变更量。
[0030]
返回至图1,ai控制器3利用上述学习完毕模型2而对操作量mv进行计算。除了目标设定值n以外,对ai控制器3还赋予参数p。根据后述的原理,ai控制器3对于各种控制对象9以及目标设定值n的组合也利用相同的学习完毕模型2而对操作量mv进行计算。例如,即使在控制对象9与控制对象9a不同的情况下,也利用学习完毕模型2对该控制对象9的操作量mv进行计算。即使在控制对象9与控制对象9a相同但目标设定值n与目标设定值na不同的情况下,也利用学习完毕模型2对该控制对象9的操作量mv进行计算。即使在控制对象9与控制对象9a不同、且目标设定值n与目标设定值na不同的情况下,也利用学习完毕模型2对该控制对象9的操作量mv进行计算。还参照图5对ai控制器3进行说明。
[0031]
图5是表示ai控制器的概略结构的例子的图。ai控制器3包含获取部31、调整部32、计算部33以及存储部34。除了此前说明的学习完毕模型2以外,还示出了学习部21。学习部21进行学习完毕模型2的学习。对于学习,使用包含控制对象9a的过程数据以及目标设定值na在内的学习数据。通过学习部21学习后的学习完毕模型2可以由ai控制器3利用。
[0032]
获取部31获取控制对象9的过程数据x。例如,获取部31以控制周期t而获取控制对象9的过程数据x。控制周期t由此后说明的调整部32进行调整。
[0033]
调整部32进行为了利用学习完毕模型2对控制对象9的操作量mv进行计算所需的各种调整。对调整部32赋予目标设定值n以及参数p。
[0034]
还如此前所述,目标设定值n是过程数据x的目标值。例如,在过程数据x是温度的情况下,目标设定值n是目标温度(50℃、100℃等)。
[0035]
参数p是表示控制对象9的控制的特征的参数。例如,参数p可以是用于确定控制对象9的操作量、与根据该操作量而获得的过程数据(也称为控制量等)的关系的参数。操作量与获得的过程数据的关系(输入输出特性)在pid(proportional integral differential)控制等中也被称为传递特性等。这种参数p的具体例是输入输出范围、过程增益以及时间常数等。例如,输入输出范围表示操作量以及过程数据的范围。过程增益表示过程数据除以操作量所得的值。时间常数表示一阶滞后时间常数等。关于此前说明的学习完毕模型2的学习时的控制对象9a的参数pa(图2)也一样。
[0036]
目标设定值n以及参数p可以根据控制对象9而各不相同。因此,对调整部32赋予与实际的控制对象9对应的(不同控制对象的)目标设定值n以及参数p。此外,这里的不同控制对象的目标设定值n表示还包含针对相同的控制对象9而不同的目标设定值。可以通过用户操作而赋予上述目标设定值n以及参数p,例如,可以参照对每个控制对象9的目标设定值n以及参数p中的至少一者进行记述的数据表等而自动地赋予。
[0037]
对由调整部32实现的具体的调整进行说明。作为与具体的调整相关的功能模块,调整部32包含周期调整部321以及函数调整部322。
[0038]
周期调整部321基于所赋予的参数p中包含的时间常数而对控制周期t进行调整(决定、更新等)。如此前所述,控制周期t是获取部31对过程数据x的获取周期,另外,还可以
设为后述的计算部33对操作量mv的计算周期。以基于时间常数的控制周期t而获取过程数据x,对操作量mv进行计算并对控制对象9进行控制,由此进行控制对象9的与响应速度等相应的适当的控制。例如,周期调整部321可以以随着时间常数变小而缩短控制周期t的方式对控制周期t进行调整。这是因为,时间常数越小,能够求出越精细的间隔的控制。可以以与时间常数的大小成正比的方式对控制周期t进行调整。
[0039]
函数调整部322基于所赋予的目标设定值n以及参数p中的至少一者而对映射函数f进行调整。映射函数f将由获取部31获取的过程数据x映射(变换)为特征数据s。
[0040]
图6是示意性地表示基于映射函数的映射的例子的图。作为“x1”、“x2”以及“x3”等而示意性地示出了过程数据x。作为“s1”、“s2”以及“s3”等而示意性地示出了特征数据s。在该例子中,过程数据x1映射(变换)为特征数据s1,过程数据x2映射(变换)为特征数据s2,过程数据x3映射(变换)为特征数据s3。此外,映射并不局限于这种1对1的单射,也可以是全射。
[0041]
例如,基于映射函数f的映射为线性映射,映射函数f利用系数向量a而表示为f(x)=ax。在过程数据x为(x1、x2)的情况下,以下面的方式求解特征数据s(s1、s2)。下述式中的系数a1~系数a4表示系数向量a的分量。
[0042]
【数学式1】
[0043][0044]
上述系数向量a由函数调整部322调整。具体而言,函数调整部322基于所赋予的目标设定值n及参数p中的至少一者、和目标设定值na及参数pa(学习完毕模型2的学习时的目标设定值及参数)中的至少一者而对系数向量a进行调整。
[0045]
假设如果目标设定值n及参数p、和目标设定值na及参数pa相同,则以下面的方式对系数向量a进行调整。
[0046]
【数学式2】
[0047][0048]
在上述情况下,特征数据s与过程数据x相同。但是,实际上,目标设定值n及参数p和目标设定值na及参数pa不同的情况不少,特征数据s是与过程数据x不同的数据。
[0049]
函数调整部322基于目标设定值n及参数p中的至少一者、与目标设定值na及参数pa中的至少一者的对比结果(例如比率等)而对系数向量a进行调整。例如,在特定的控制对象9a的特定的目标设定值na小于控制对象9的目标设定值n的情况下,函数调整部322以使得特征数据s小于过程数据x的方式对系数向量a进行调整。如果特定的控制对象9a的特定的目标设定值na与控制对象9的目标设定值n的比率为1:2,则调整部32可以以使得特征数据s变为过程数据x的0.5倍(1/2)的方式对系数向量a进行调整。能够获得下面的系数向量a。
[0050]
【数学式3】
[0051][0052]
根据同样的主旨,在参数p与参数pa不同的情况下,函数调整部322也基于上述对
比结果(比率等)而对系数向量a进行调整。例如,基于参数p中包含的过程增益与参数pa中包含的过程增益的比率、或者基于控制对象9中包含的输入输出范围与参数pa中包含的输入输出范围的比率而对系数向量a进行调整。
[0053]
此外,系数向量a的调整可以通过用户操作而手动地进行。学习完毕模型2的超参数可以手动地进行调整。
[0054]
例如,函数调整部322以如上方式对映射函数f进行调整。函数调整部322还对逆映射函数f-1
进行调整。逆映射函数f-1
是映射函数f的反函数,利用上述系数向量a的逆矩阵等进行调整。
[0055]
返回至图5,计算部33利用由获取部31获取的过程数据x、以及学习完毕模型2而对操作量mv进行计算。作为与计算相关的功能模块,计算部33包含映射部331、执行部332以及逆映射部333。
[0056]
映射部331利用由函数调整部322调整的映射函数f将由获取部31获取的过程数据x映射(变换)为特征数据s。
[0057]
执行部332将通过映射部331的映射获得的特征数据s输入至学习完毕模型2。例如此前参照图2以及图3说明的那样,对于学习完毕模型2作为选项而赋予与所输入的特征数据s对应的对应操作量(操作变更量)。上述参数与权重相关联,通过乘法运算、加法运算等而求出评价值。评价值最高的操作量被决定为特征数据s
mv
。此外,可以在学习完毕模型2中执行特征数据s
mv
的决定所需的计算(乘法运算、加法运算等),也可以由执行部332执行。无论如何执行部332都能够从学习完毕模型2获取特征数据s
mv
。
[0058]
逆映射部333利用由函数调整部322调整的逆映射函数f-1
将由执行部332获取的特征数据s
mv
逆映射(逆变换)为操作量mv。
[0059]
例如,计算部33以如上方式对操作量mv进行计算。计算部33对控制对象9赋予(输出)计算出的操作量mv而对控制对象9进行控制。
[0060]
存储部34对ai控制器3中执行的处理所需的各种信息进行存储。作为存储的信息,举例示出了学习时信息34a以及控制程序34b。学习时信息34a是学习完毕模型2的学习时的信息,包含此前参照图2说明的目标设定值na以及参数pa。控制程序34b是使计算机执行ai控制器3的处理的程序。
[0061]
此外,存储部34不仅作为ai控制器3而起作用,还可以作为控制器1的存储部而起作用。控制程序34b可以是用于使计算机执行控制器1的处理的程序。
[0062]
图7是表示控制器中执行的处理(控制方法)的例子的流程图。适当地将与至此的说明重复的内容省略。
[0063]
在步骤s101中,基于参数p而对控制周期t进行调整。周期调整部321基于所赋予的参数p中包含的时间常数而对控制周期t进行调整。
[0064]
在步骤s102中,基于目标设定值n、参数p而对映射函数f等进行调整。函数调整部322基于所赋予的目标设定值n以及参数p中的至少一者而对映射函数f以及逆映射函数f-1
进行调整。
[0065]
在步骤s103中,为了以此前的步骤s101中调整的控制周期t反复执行步骤s104~步骤s107的处理,使得处理分支。处理以控制周期t的间隔(步骤s103:yes)而进入步骤s104。在除此以外的定时(步骤s103:no),不推进处理。该判断例如可以由获取部31进行。
[0066]
在步骤s104中,获取过程数据x。获取部31获取控制对象9的过程数据x。
[0067]
在步骤s105中,利用映射函数f对过程数据x进行映射,获取特征数据s。计算部33的映射部331利用此前的步骤s102中调整的映射函数f,将此前的步骤s104中获取的过程数据x映射(变换)为特征数据s。
[0068]
在步骤s106中,将特征数据s输入至学习完毕模型2,获取特征数据s
mv
。计算部33的执行部332将此前的步骤s105中获取的特征数据s输入至学习完毕模型2。作为特征数据s
mv
而决定、获取评价值最高的操作量。
[0069]
在步骤s107中,利用逆映射函数f-1
对特征数据s
mv
进行逆映射,获取操作量mv。计算部33的逆映射部333利用此前的步骤s102中调整的逆映射函数f-1
,对此前的步骤s106中获取的特征数据s
mv
进行逆映射(逆变换)并获取操作量mv。
[0070]
例如,以如上方式利用学习完毕模型2对控制对象9的操作量mv进行计算。对控制对象9赋予(输出)操作量mv而对控制对象9进行控制。此外,可以以相反的顺序执行上述的步骤s101以及步骤s102的处理,也可以同时(并行)执行。
[0071]
根据以上说明的控制器1,利用关于特定的控制对象9a而学习的学习完毕模型2,即使在实际的控制对象9与控制对象9a不同、或者控制对象9的目标设定值n与控制对象9a的目标设定值na不同的情况下,也能够对该控制对象9的操作量mv进行计算。实际的控制对象9的目标设定值n以及参数p因设备更新、生产计划的变更等而各不相同,但是在任何控制对象9以及目标设定值n的情况下都能够利用相同的学习完毕模型2。因此,能够提高学习完毕模型2的通用性、实用性。
[0072]
以上对本公开的一个实施方式进行了说明。公开的技术并不局限于上述实施方式。对几个变形例进行说明。
[0073]
在一个实施方式中,ai控制器可以与pid控制器组合使用。参照图7对这种混合型的控制器的例子进行说明。
[0074]
图8是表示变形例所涉及的控制器的概略结构的例子的图。举例所示的控制器1a与控制器1(图1)相比,在还包含pid控制器4以及切换部5这一点上不同。
[0075]
pid控制器4也对控制对象9的操作量mv进行计算。具体而言,pid控制器4对使得过程数据x与目标设定值n之差接近0的操作量mv进行计算。计算例如基于下式而进行。
[0076]
【数学式4】
[0077][0078]
在上述式子中,e(t)以及u(t)分别与过程数据x(控制量)以及操作量mv对应。kp、ki以及kd是p增益、i增益以及d增益(pid增益)。kp、ki以及kd可以是常数。上述参数可以根据经验值或理论值以及在现场的校准等而决定。
[0079]
在还具有上述这种pid控制器4的控制器1a中,能够利用如下控制模式:利用ai控制器3对控制对象9进行控制的第1控制模式;以及利用pid控制器4对控制对象9进行控制的第2控制模式。
[0080]
切换部5对第1控制模式以及第2控制模式进行切换。例如,切换部5将表示切换为第1控制模式的信号输出至ai控制器3以及pid控制器4。由此,将控制模式切换为对控制对象9赋予由ai控制器3(的计算部33)计算出的操作量mv的第1控制模式。在第1控制模式中,
可以使pid控制器4停止。切换部5将表示切换为第2控制模式的信号输出至ai控制器3以及pid控制器4。由此,将控制模式切换为对控制对象9赋予由pid控制器4计算出的操作量mv的第2控制模式。在第2控制模式中,可以使ai控制器3停止。可以自动地进行切换部5对第1控制模式以及第2控制模式的切换,也可以与用户操作等相应地手动地进行。
[0081]
在利用pid控制器4的情况下,能够进行使过程数据x接近目标设定值n的控制,但是产生升高时的过冲(over shot)以及下冲(under shot)中的至少一者的情况不少。例如如果在温度控制中产生过冲,则温度下降需要耗费时间,与此相应地,产生生产的开始会滞后的问题。另一方面,如果以不产生过冲的方式对pid增益进行调整,则直至使得过程数据x接近目标设定值n为止而耗费时间。对于最佳的pid增益调整需要较多的时间和劳力。根据条件变化等,有时还需要再次进行pid增益调整(再调谐)。
[0082]
另一方面,ai控制器3利用以抑制上述这样的过冲等的产生且较快地达到目标设定值的方式学习后的学习完毕模型2,能够进行改善了上述pid控制器4的缺点的控制。
[0083]
例如,切换部5可以在升高时将控制模式切换为第1控制模式(基于ai控制器3的控制)。这是因为,在水位、炉温升高时,难以利用pid控制器4进行最佳的控制,利用ai控制器3较好的情况也不少。另一方面,切换部5可以在目标设定值n附近将控制模式切换为第2控制模式(基于pid控制器4的控制)。这是因为,利用基于pid控制器4的通用的控制即可。由此,例如能够抑制上述过冲等,并且能够使过程数据x较快地在目标设定值n附近稳定。
[0084]
根据控制器1a,例如与仅使用学习完毕模型2以及ai控制器3的情况相比,另外,与单独使用pid控制器4的情况相比,能够提高控制对象9的控制精度的可能性提高。
[0085]
在一个实施方式中,学习完毕模型2可以设置于ai控制器3的内部。例如,可以将学习完毕模型2存储于ai控制器3的存储部34。学习部21也可以设置于ai控制器3的内部。例如,在ai控制器3中,可以将通过某个控制对象以及某个目标设定值的条件下的学习生成的学习完毕模型2用于是与该控制对象相同的控制对象但目标设定不同的条件下的控制。
[0086]
在一个实施方式中,基于控制器1(或控制器1a)的处理可以通过云计算等而实现。例如,学习完毕模型2、ai控制器3的获取部31、调整部32、计算部33以及存储部34的功能的一部分或全部可以设置于控制器1的外部的装置。控制器1可以通过与这种外部的装置通信而执行至此说明的处理。
[0087]
在上述实施方式中,说明了利用映射函数f对过程数据x进行变换的例子。但是,并不局限于映射函数f,可以使用能够对过程数据x进行变换的所有方法。
[0088]
在上述实施方式中,作为参数p,举出时间常数、输入输出范围以及过程增益为例进行了说明。但是,并不局限于此,可以将能够表示控制对象9的控制的特征的所有参数用作参数p。
[0089]
在上述实施方式中,对学习完毕模型2具有保有多个样本数据的结构的例子进行了说明。但是,可以将具有能够输出用于使特定的控制对象9a的过程数据接近特定的目标设定值na的操作量的所有结构的学习完毕模型用作学习完毕模型2。
[0090]
图9是表示控制器的硬件结构的例子的图。具有举例所示的硬件结构的计算机等作为至此说明的控制器1(或控制器1a)而起作用。在该例子中,控制器1具有利用总线等而相互连接的通信装置1a、显示装置1b、hdd(hard disk drive)1c、存储器1d以及处理器1e。
[0091]
通信装置1a是网络接口卡等,能够与其他装置通信。显示装置1b例如是触摸面板、
显示器等。hdd1c作为存储部34而起作用,对控制程序34b等进行存储。
[0092]
处理器1e将控制程序34b从hdd1c等读取并使其在存储器1d展开而使计算机作为控制器1起作用。功能包含至此说明的获取部31的功能、调整部32的功能以及计算部33的功能。
[0093]
控制程序34b能够经由互联网等网络而配置。另外,在硬盘、软盘(fd)、cd-rom、mo(magneto-optical disk)、dvd(digital versatile disc)等计算机可读取记录介质对控制程序34b进行记录,能够利用计算机从记录介质读取而执行。
[0094]
例如以下述方式限定以上说明的技术。如参照图1~图7等说明的那样,控制器1具有获取部31以及计算部33。获取部31获取实际的控制对象9的过程数据x。计算部33基于实际的控制对象9的目标设定值n以及参数p(例如输入输出范围以及过程增益等)中的至少一者而对由获取部31获取的过程数据x进行变换,利用变换后的过程数据(特征数据s)以及学习完毕模型2而对实际的控制对象9的操作量mv进行计算。如果将特定的控制对象9a的过程数据输入至学习完毕模型2,则输出用于使特定的控制对象9a的过程数据接近特定的目标设定值na的操作量。参数p包含用于确定实际的控制对象9的操作量、与利用该操作量获得的过程数据的关系的参数。控制器1可以具有进行学习完毕模型2的学习的学习部21。
[0095]
根据上述控制器1,利用关于特定的控制对象9a而学习后的学习完毕模型2,即使在实际的控制对象9与控制对象9a不同、或者控制对象9的目标设定值n与控制对象9a的目标设定值na不同的情况下,也能够对该控制对象9的操作量mv进行计算。实际的控制对象9的目标设定值n以及参数p因设备更新、生产计划的变更等而各不相同,但是无论在任何控制对象9以及目标设定值n的情况下,都能够利用相同的学习完毕模型2。因此,能够提高学习完毕模型2的通用性、实用性。
[0096]
如参照图5等说明的那样,控制器1可以具有基于实际的控制对象9的目标设定值n以及参数p中的至少一者与特定的控制对象9a的特定的目标设定值na以及特定的控制对象9a的参数pa中的至少一者的对比结果(例如比率等)而对映射函数f进行调整的函数调整部322,计算部33可以利用由函数调整部322调整的映射函数f对由获取部31获取的过程数据x进行变换。例如利用这种映射函数f能够适当地对过程数据x进行变换。计算部33可以针对利用变换后的过程数据(特征数据s)以及学习完毕模型2计算出的数据(特征数据smv)进行与上述变换相反的逆变换(基于逆映射函数f-1的逆映射)而对实际的控制对象9的操作量mv进行计算。
[0097]
参数p可以包含时间常数,控制器1可以具有基于参数p中包含的时间常数而对控制周期t进行调整的周期调整部321,获取部31可以以由周期调整部321调整后的控制周期t而获取实际的控制对象9的过程数据。由此,能够以适当的控制周期t对控制对象9进行控制。
[0098]
如参照图8等说明的那样,控制器1可以具有:pid控制器4,其对实际的控制对象9的操作量mv进行计算;以及切换部5,其对第1控制模式以及第2控制模式进行切换,该第1控制模式对实际的控制对象9赋予由(ai控制器3的)计算部33计算出的操作量mv,该第2控制模式对实际的控制对象9赋予由pid控制器4计算出的操作量mv。由此,与例如仅利用ai控制器3或者pid控制器4的情况相比,能够提高控制对象9的控制精度的可能性提高。
[0099]
参照图7等说明的控制方法也是实施方式之一。控制方法包含如下步骤:获取实际
的控制对象9的过程数据x(步骤s104);以及基于实际的控制对象9的目标设定值n以及参数p中的至少一者对所获取的过程数据x进行变换,利用变换后的过程数据(特征数据s)以及学习完毕模型2而对实际的控制对象9的操作量mv进行计算(步骤s105~步骤s107)。根据这种控制方法,如至此说明的那样,能够提高学习完毕模型2的通用性、实用性。
[0100]
参照图5以及图8等说明的控制程序34b也是实施方式之一。控制程序34b使计算机执行如下处理:获取实际的控制对象9的过程数据x;以及基于实际的控制对象9的目标设定值n以及参数p中的至少一者对所获取的过程数据x进行变换,利用变换后的过程数据(特征数据s)以及学习完毕模型2而对实际的控制对象9的操作量mv进行计算。根据这种控制程序34b,如至此说明的那样,能够提高学习完毕模型2的通用性、实用性。此外,参照图9等说明的对控制程序34b进行记录的记录介质也是实施方式之一。
[0101]
标号的说明
[0102]1ꢀꢀꢀ
控制器
[0103]2ꢀꢀꢀ
学习完毕模型
[0104]
21
ꢀꢀ
学习部
[0105]3ꢀꢀꢀ
ai控制器
[0106]
31
ꢀꢀ
获取部
[0107]
32
ꢀꢀ
调整部
[0108]
321 周期调整部
[0109]
322 函数调整部
[0110]
33
ꢀꢀ
计算部
[0111]
331 映射部
[0112]
332 执行部
[0113]
333 逆映射部
[0114]
34
ꢀꢀ
存储部
[0115]
34a 学习时信息
[0116]
34b 控制程序
[0117]4ꢀꢀꢀ
pid控制器
[0118]5ꢀꢀꢀ
切换部
[0119]9ꢀꢀꢀ
控制对象
[0120]
9a
ꢀꢀ
控制对象(特定的控制对象)
[0121]aꢀꢀꢀ
系数向量
[0122]fꢀꢀꢀ
映射函数
[0123]
f-1
ꢀꢀ
逆映射函数
[0124]
mv
ꢀꢀ
操作量
[0125]nꢀꢀꢀ
目标设定值
[0126]
na
ꢀꢀ
目标设定值(特定的目标设定值)
[0127]
p
ꢀꢀꢀ
参数
[0128]
pa
ꢀꢀ
参数(特定的控制对象的参数)
[0129]sꢀꢀꢀ
特征数据
[0130]smv 特征数据(与操作变更量相关的特征数据)
[0131]
t
ꢀꢀꢀ
控制周期
[0132]
x
ꢀꢀꢀ
过程数据。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1