作业车辆的作业装置控制系统及方法、作业车辆与流程
1.本公开涉及作业车辆领域,特别涉及一种作业车辆的作业装置控制系统及方法,以及包括该作业装置控制系统的作业车辆。
背景技术:
2.举高消防车作为主战消防车辆,广泛应用于中高层建筑、石化工矿企业等场所的火灾扑救及人员救援。我国幅员辽阔、地形复杂,在丘陵、山地等地区,车辆经常需要停驻在较大坡度的倾斜面上进行作业,为提高车辆在不同场地的适用性,举高消防车应具备一定的对作业装置的调平能力。目前欧洲标准对于调平能力的要求最高,消防车辆需实现在坡度至少为7
°
的地面调平作业装置。
3.在发明人已知的相关技术中,消防车辆可采用支腿调平作业装置。采用支腿调平作业装置的消防车辆,其调平能力取决于支腿的伸出长度。然而,为提升消防车辆作业时的稳定性,其支腿跨距通常较大,支腿在竖直方向上的伸长量也不宜过大,因此支腿调平方式仅适用于车辆在小坡度斜面作业的工况,不利于提升车辆对作业装置的调平能力。消防车辆也可采用具有调平能力的回转支承调平作业装置。然而,在发明人已知的相关技术中,仅基于回转支承的结构原理对回转支承调平作业装置的可行性进行定性描述,不利于实现消防车辆在复杂场景的具体应用,也不利于提升车辆对作业装置的调平能力。
技术实现要素:
4.本公开的目的在于提供一种作业车辆的作业装置控制系统及方法和包括该作业装置控制系统的作业车辆,以提升作业车辆对作业装置的调平能力。
5.本公开的第一方面提供一种作业车辆的作业装置控制系统,包括:姿态调节装置,包括回转支承,所述回转支承包括外下圈、内下圈、内上圈和外上圈,所述外下圈用于连接所述作业车辆的车体,所述内下圈绕第一轴线可旋转地设置于所述外下圈上,所述内上圈绕与所述第一轴线具有第一夹角θ的第二轴线可旋转地设置于所述内下圈上,所述外上圈绕所述第一轴线可旋转地设置于所述内上圈上,所述外上圈用于连接所述作业装置,所述回转支承被配置为调节所述外上圈的上端面与所述外下圈的下端面的第二夹角以调节所述作业车辆的作业装置相对于水平面的姿态;驱动装置,被配置为驱动所述姿态调节装置动作,所述驱动装置包括与所述回转支承驱动连接的多个回转支承驱动装置;和控制装置,包括与所述驱动装置信号连接的控制器,所述控制器被配置为:获取待校正角度γ,并根据所述内下圈和所述内上圈同时旋转的状态下,所述内下圈绕所述第一轴线转过的下旋转角αd、所述内上圈绕所述第二轴线转过的上旋转角αu和所述第二夹角的变化量δγ的对应关系以及待校正角度γ,获取使所述多个回转支承驱动装置的旋转角度的绝对值之和最小的所述下旋转角αd的第一目标值α
d0
和所述上旋转角αu的第二目标值α
u0
,并根据所述第一目标值α
d0
和所述第二目标值α
u0
,生成驱动所述回转支承动作的回转支承控制信号,以通过调节所述第二夹角,将所述外上圈的上端面由相对于水平面成所述待校正角度γ的状态调节至
水平状态。
6.根据本公开的一些实施例,所述作业装置控制系统包括与所述控制器信号连接的倾角检测装置,所述倾角检测装置被配置为获取所述车体相对于水平面的第一倾角φ;所述控制器被进一步配置为根据所述第一倾角φ获取所述待校正角度γ。
7.根据本公开的一些实施例,所述多个回转支承驱动装置包括第一驱动装置、第二驱动装置和第三驱动装置,所述第一驱动装置与所述内下圈驱动连接,用于驱动所述内下圈相对于所述外下圈绕所述第一轴线转动,所述第二驱动装置与所述内上圈驱动连接,用于驱动所述内上圈相对于所述内下圈绕所述第二轴线转动,所述第三驱动装置与所述外上圈驱动连接,用于驱动所述外上圈相对于所述内上圈绕所述第一轴线转动;所述控制器被进一步配置为:根据所述第一目标值α
d0
和所述第二目标值α
u0
,获取第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
,并生成用于所述第一驱动装置驱动所述内下圈相对于所述外下圈绕所述第一轴线转动所述第一旋转角α
10
的第一控制信号、用于所述第二驱动装置驱动所述内上圈相对于所述内下圈绕所述第二轴线转动所述第二旋转角α
20
的第二控制信号、用于所述第三驱动装置驱动所述外上圈相对于所述内上圈绕所述第一轴线转动所述第三旋转角α
30
的第三控制信号。
8.根据本公开的一些实施例,所述控制器被进一步配置为:根据所述内下圈和所述内上圈同时旋转的状态下,所述下旋转角αd、所述上旋转角αu以及所述第二夹角的变化量δγ的对应关系以及所述待校正角度γ,获取所述下旋转角αd和所述上旋转角αu的解集,并从所述解集中选取所述第一旋转角α
10
、所述第二旋转角α
20
和所述第三旋转角α
30
的绝对值之和最小的一组解作为所述第一目标值α
d0
和所述第二目标值α
u0
。
9.根据本公开的一些实施例,所述控制器被进一步配置为:根据所述第一旋转角α
10
、所述第二旋转角α
20
和所述第三旋转角α
30
的比例关系生成使所述第一驱动装置的转速、所述第二驱动装置的转速和所述第三驱动装置的转速满足所述比例关系的所述第一控制信号、所述第二控制信号和所述第三控制信号,以使所述内下圈、所述内上圈和所述外上圈同步开始和停止转动。
10.根据本公开的一些实施例,所述控制器被进一步配置为:根据所述待校正角度γ,获取所述外上圈的上端面的法向量在垂直于水平面且沿所述车体的长度方向延伸的第一平面内的投影与所述车体的高度方向的第三夹角γ
x
和所述外上圈的上端面的法向量在垂直于水平面且沿所述车体的宽度方向延伸的第二平面内的投影与所述车体的高度方向的第四夹角γy,并根据所述第三夹角γ
x
、第一对应关系、所述第四夹角γy和第二对应关系,获取所述下旋转角αd和所述上旋转角αu的解集,其中,所述第一对应关系为所述下旋转角αd、所述上旋转角αu以及所述第三夹角γ
x
的变化量δγ
x
的对应关系,所述第二对应关系为所述下旋转角αd、所述上旋转角αu以及所述第四夹角γy的变化量δγy的对应关系。
11.根据本公开的一些实施例,所述回转支承驱动装置包括马达和减速机,所述马达与所述控制装置信号连接,所述减速机与所述马达传动连接且与所述回转支承驱动连接。
12.根据本公开的一些实施例,所述马达为液压马达,所述控制装置还包括与所述液压马达连接且与所述控制器信号连接的控制阀,所述控制器被进一步配置为生成所述控制阀的开度控制信号,所述控制阀被配置为根据所述开度控制信号调节所述马达的流量以调节所述马达的转速。
13.根据本公开的一些实施例,所述作业装置控制系统还包括与所述控制器信号连接的转角检测装置,所述转角检测装置被配置为检测所述减速机转过的角度,所述控制器被进一步配置为根据所述减速机转过的角度获取所述内下圈转过的角度、所述内上圈转过的角度和所述外上圈转过的角度,以判断所述外上圈的上端面是否达到水平状态。
14.根据本公开的一些实施例,所述姿态调节装置还包括支腿,所述驱动装置还包括与所述支腿驱动连接的支腿驱动装置,所述支腿用于沿所述车体的高度方向可伸缩地设置,以在所述支腿驱动装置驱动下调节所述外上圈的上端面的倾角。
15.根据本公开的一些实施例,所述控制器被进一步配置为:判断所述车体相对于水平面的第一倾角φ与支腿最大调节角度α的大小,所述支腿最大调节角度α表示通过驱动所述支腿动作的方式能够校正的所述外上圈的上端面相对于水平面的夹角的最大值,若所述第一倾角φ小于或等于所述支腿最大调节角度α,生成用于驱动所述支腿动作的第一支腿控制信号,以将所述外上圈的上端面调节至水平状态,若所述第一倾角φ大于所述支腿最大调节角度α,生成用于驱动所述支腿动作的第二支腿控制信号,以将所述外上圈的上端面向所述第一倾角φ的相反方位转动所述支腿最大调节角度α,并生成所述回转支承控制信号,以将所述外上圈的上端面由相对于水平面成所述待校正角度γ的状态调节至水平状态,其中,以向所述第一倾角φ的相反方位转动所述支腿最大调节角度α之后所述外上圈的上端面相对于水平面的第二倾角φ-α作为所述待校正角度γ。
16.本公开的第二方面提供一种作业车辆,包括:车体;作业装置;和本公开的第一方面所述的作业装置控制系统,其中,所述回转支承的所述外下圈连接于所述车体,所述回转支承的外上圈连接于所述作业装置。
17.根据本公开的一些实施例,所述作业车辆为消防车辆。
18.本公开的第三方面提供一种根据本公开的第一方面所述的作业装置控制系统的作业装置控制方法,包括:获取待校正角度γ;根据所述内下圈和所述内上圈同时旋转的状态下,所述下旋转角αd、所述上旋转角αu和所述第二夹角的变化量δγ的对应关系以及所述待校正角度γ,获取使所述多个回转支承驱动装置的旋转角度的绝对值之和最小的所述下旋转角αd的第一目标值α
d0
和所述上旋转角αu的第二目标值α
u0
;根据所述第一目标值α
d0
和所述第二目标值α
u0
,驱动所述回转支承动作,将所述外上圈的上端面由相对于水平面成所述待校正角度γ的状态调节至水平状态。
19.根据本公开的一些实施例,所述多个回转支承驱动装置包括第一驱动装置、第二驱动装置和第三驱动装置,所述第一驱动装置与所述内下圈驱动连接,用于驱动所述内下圈相对于所述外下圈绕所述第一轴线转动,所述第二驱动装置与所述内上圈驱动连接,用于驱动所述内上圈相对于所述内下圈绕所述第二轴线转动,所述第三驱动装置与所述外上圈驱动连接,用于驱动所述外上圈相对于所述内上圈绕所述第一轴线转动;根据所述第一目标值α
d0
和所述第二目标值α
u0
,驱动所述回转支承动作,将所述外上圈的上端面由相对于水平面成所述待校正角度γ的状态调节至水平状态包括:根据所述第一目标值α
d0
和所述第二目标值α
u0
,获取第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
,其中,所述第一旋转角α
10
表示所述第一驱动装置驱动所述内下圈相对于所述外下圈绕所述第一轴线转过的角度,所述第二驱动装置驱动所述第二旋转角α
20
表示所述内上圈相对于所述内下圈绕所述第二轴线转过的角度,所述第三旋转角α
30
表示所述第三驱动装置驱动所述外上圈相对于所述内
上圈绕所述第一轴线转过的角度。
20.根据本公开的一些实施例,获取使所述多个回转支承驱动装置的旋转角度的绝对值之和最小的所述第一目标值α
d0
和所述第二目标值α
u0
包括:根据所述内下圈和所述内上圈同时旋转的状态下,所述下旋转角αd、所述上旋转角αu和所述第二夹角的变化量δγ的对应关系以及所述待校正角度γ,获取所述下旋转角αd和所述上旋转角αu的解集;从所述解集中选取所述第一旋转角α
10
、所述第二旋转角α
20
和所述第三旋转角α
30
的绝对值之和最小的一组解作为所述第一目标值α
d0
和所述第二目标值α
u0
。
21.根据本公开的一些实施例,所述作业装置控制方法还包括:根据所述第一旋转角α
10
、所述第二旋转角α
20
和所述第三旋转角α
30
的比例关系确定所述第一驱动装置、所述第二驱动装置和所述第三驱动装置的转速的比例关系,以使所述内下圈、所述内上圈和所述外上圈同步开始和停止转动。
22.根据本公开的一些实施例,所述作业装置控制方法还包括:获取所述内下圈和所述内上圈同时旋转的状态下,所述下旋转角αd、所述上旋转角αu和所述第二夹角的变化量δγ的对应关系,包括:获取所述下旋转角αd、所述上旋转角αu以及所述外上圈的上端面的法向量在垂直于水平面且沿所述车体的长度方向延伸的第一平面内的投影与所述车体的高度方向的第三夹角γ
x
的变化量δγ
x
的第一对应关系;和获取所述下旋转角αd、所述上旋转角αu以及所述外上圈的上端面的法向量在垂直于水平面且沿所述车体的宽度方向延伸的第二平面内的投影与所述车体的高度方向的第四夹角δγy的变化量δγy的第二对应关系。
23.根据本公开的一些实施例,根据所述内下圈和所述内上圈同时旋转的状态下,所述下旋转角αd、所述上旋转角αu和所述第二夹角的变化量δγ的对应关系以及所述待校正角度γ,获取使所述多个回转支承驱动装置的旋转角度的绝对值之和最小的所述第一目标值α
d0
和所述第二目标值α
u0
包括:根据所述待校正角度γ,获取所述第三夹角γ
x
和所述第四夹角γy;根据所述第三夹角γ
x
和所述第一对应关系、根据所述第四夹角γy和所述第二对应关系,获取所述下旋转角αd和所述上旋转角αu的解集。
24.根据本公开的一些实施例,所述待校正角度γ小于或等于5
°
且所述第一夹角θ小于或等于5
°
时,所述第一对应关系和所述第二对应关系表示为:,,其中,δγ
dx
表示所述内下圈绕所述第一轴线转过所述下旋转角αd时,所述内下圈的上端面的法向量n2在所述第一平面内的投影与所述车体的高度方向的夹角的变化量,δγ
dx
=sinαd∙
θ,δγ
dy
表示所述内下圈绕所述第一轴线转过所述下旋转角αd时,所述内下圈的上端面的法向量n2在所述第二平面内的投影与所述车体的高度方向的夹角的变化量,δγ
dy
=(cosα
d-1)
∙
θ,δγ
ux
表示所述内上圈绕所述第二轴线转过所述上旋转角αu时,所述内上圈的上端面的法向量n4在所述第一平面内的投影与所述车体的高度方向的夹角的变化量,δγ
ux
=-sinαu∙
θ,δγ
uy
表示所述内上圈绕所述第二轴线转过上旋转角αu时,所述内上圈的上端面的法向量n4在所述第二平面内的投影与所述车体的高度方向的夹角的变化量,
δγ
uy
=-(cosα
d-1)
∙
θ。
25.根据本公开的一些实施例,获取所述待校正角度γ包括:将所述第一倾角φ作为所述待校正角度γ。
26.根据本公开的一些实施例,所述姿态调节装置还包括支腿,所述支腿用于沿所述车体的高度方向可伸缩地设置以调节所述车体的姿态,所述作业装置控制方法还包括:判断所述第一倾角φ与支腿最大调节角度α的大小,所述支腿最大调节角度α表示通过驱动所述支腿动作的方式能够校正的所述外上圈的上端面相对于水平面的夹角的最大值;若所述第一倾角φ小于或等于所述支腿最大调节角度α,驱动所述支腿动作,将所述外上圈的上端面调节至水平状态;若所述第一倾角φ大于所述支腿最大调节角度α,驱动所述支腿动作,将所述外上圈的上端面向所述第一倾角φ的相反方位转动所述支腿最大调节角度α,获取所述待校正角度γ包括:将向所述第一倾角φ的相反方位转动所述支腿最大调节角度α之后所述外上圈的上端面相对于水平面的倾角φ-α作为所述待校正角度γ。
27.本公开提供的作业装置控制系统中,控制装置根据下旋转角αd、上旋转角αu和第二夹角的变化量δγ的对应关系和待校正角度γ获取下旋转角αd的第一目标值α
d0
和上旋转角αu的第二目标值α
u0
,根据第一目标值α
d0
、第二目标值α
u0
以及各回转支承驱动装置与回转支承各转动部件的驱动连接关系,可以进一步确定待校正角度γ与各回转支承驱动装置的旋转角度之间的定量关系,利于提升作业车辆对不同作业场景的适应能力。并且,第一目标值α
d0
和第二目标值α
u0
使多个回转支承驱动装置的旋转角度的绝对值之和最小,可以通过缩短多个回转支承驱动装置的运动路径,缩短将外上圈的上端面调节至水平状态所需的时间,利于将作业装置快速调平,进而实现作业车辆的快速部署。
28.本公开提供的作业车辆和本公开提供的作业装置控制系统具有本公开提供的作业装置控制系统所具有的优点。
29.通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
附图说明
30.此处所说明的附图用来提供对本公开的进一步理解,构成本技术的一部分,本公开的示意性实施例及其说明用于解释本公开,并不构成对本公开的不当限定。
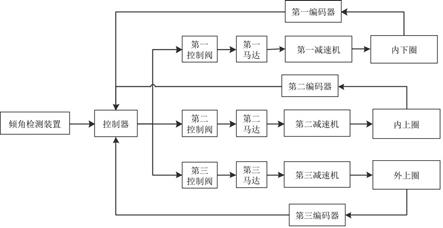
31.图1为本公开一些实施例的作业装置控制系统的结构示意图。
32.图2为本公开一些实施例的作业装置控制系统的回转支承的剖视结构示意图。
33.图3为本公开一些实施例的车辆坐标系的示意图。
34.图4为本公开一些实施例的回转支承的计算简图。
35.图5为本公开一些实施例的作业装置控制方法的流程示意图。
36.图1至图5中,各附图标记分别代表:1、回转支承;11、外下圈;12、内下圈;13、内上圈;14、外上圈;a1、第一轴线;a2、第二轴线;b、滚动体;21、第一驱动装置;22、第二驱动装置;23、第三驱动装置;3、车体;4、作业装置;5、支腿。
具体实施方式
37.下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本公开一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本公开及其应用或使用的任何限制。基于本公开中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。
38.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本公开的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,这些技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
39.在本公开的描述中,需要理解的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本公开保护范围的限制。
40.在本公开的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本公开和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本公开保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
41.本公开的实施例提供一种作业车辆的作业装置控制系统及方法,以及一种作业车辆。
42.本公开的实施例提供的作业车辆包括车体3、作业装置4和本公开的实施例提供的作业装置控制系统。本公开的实施例提供的作业车辆具有本公开实施例的作业装置控制系统所具有的优点。
43.在一些实施例中,作业车辆为消防车辆。相应地,作业车辆的作业装置可以是举高消防车的高空作业平台等。
44.如图1至图4所示,本公开的一些实施例提供一种作业车辆的作业装置控制系统,包括姿态调节装置、驱动装置和控制装置。
45.姿态调节装置包括回转支承1。如图2所示,回转支承1包括外下圈11、内下圈12、内上圈13和外上圈14。外下圈11用于连接作业车辆的车体3,内下圈12绕第一轴线a1可旋转地设置于外下圈11上,内上圈13绕与第一轴线a1具有第一夹角θ的第二轴线a2可旋转地设置于内下圈12上,外上圈14绕第一轴线a1可旋转地设置于内上圈13上,外上圈14用于连接作业装置4。回转支承1被配置为调节外上圈14的上端面与外下圈11的下端面的第二夹角以调节作业车辆的作业装置相对于水平面的姿态。
46.本公开的实施例提供的作业车辆中,回转支承1的外下圈11连接于车体3,回转支承1的外上圈14与作业装置4连接,通过调节第二夹角,就可以调节作业装置相对于车体的姿态,进而调节作业装置相对于水平面的姿态。
47.驱动装置被配置为驱动姿态调节装置动作。驱动装置包括与回转支承1驱动连接
的多个回转支承驱动装置。每个回转支承驱动装置的转动角度通过该回转支承驱动装置与回转支承1中外下圈11、内下圈12、内上圈13和外上圈14等转动部件的驱动连接关系确定。
48.控制装置包括与驱动装置信号连接的控制器。控制器被配置为:获取待校正角度γ,并根据内下圈12和内上圈13同时旋转的状态下,内下圈12绕第一轴线a1转过的下旋转角αd、内上圈13绕第二轴线a2转过的上旋转角αu和第二夹角的变化量δγ的对应关系以及待校正角度γ,获取使多个回转支承驱动装置的旋转角度的绝对值之和最小的下旋转角αd的第一目标值α
d0
和上旋转角αu的第二目标值α
u0
,并根据第一目标值α
d0
和第二目标值α
u0
,生成驱动回转支承1动作的回转支承控制信号,以通过调节第二夹角,将外上圈14的上端面由相对于水平面成待校正角度γ的状态调节至水平状态。
49.本公开实施例的作业装置控制系统中,控制装置根据下旋转角αd、上旋转角αu和第二夹角的变化量δγ的对应关系和待校正角度γ获取下旋转角αd的第一目标值α
d0
和上旋转角αu的第二目标值α
u0
,根据第一目标值α
d0
、第二目标值α
u0
以及各回转支承驱动装置与回转支承各转动部件的驱动连接关系,可以进一步确定待校正角度γ与各回转支承驱动装置的旋转角度之间的定量关系,利于提升作业车辆对不同作业场景的适应能力。并且,第一目标值α
d0
和第二目标值α
u0
使多个回转支承驱动装置的旋转角度的绝对值之和最小,可以通过缩短多个回转支承驱动装置的运动路径,缩短将外上圈的上端面调节至水平状态所需的时间,利于将作业装置快速调平,进而实现作业车辆的快速部署。
50.在一些实施例中,作业装置控制系统包括与控制器信号连接的倾角检测装置。倾角检测装置可以是设置于车体3上的双轴倾角传感器或陀螺仪等。倾角检测装置被配置为获取车体3相对于水平面的第一倾角φ。第一倾角φ可用于反映作业车辆的驻车位置的坡度。控制器被进一步配置为根据第一倾角φ获取待校正角度γ。
51.在一些实施例中,如图2所示,多个回转支承驱动装置包括第一驱动装置21、第二驱动装置22和第三驱动装置23。第一驱动装置21与内下圈12驱动连接,用于驱动内下圈12相对于外下圈11绕第一轴线a1转动,第二驱动装置22与内上圈13驱动连接,用于驱动内上圈13相对于内下圈12绕第二轴线a2转动,第三驱动装置23与外上圈14驱动连接,用于驱动外上圈14相对于内上圈13绕第一轴线a1转动。控制器被进一步配置为:根据第一目标值α
d0
和第二目标值α
u0
,获取第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
,并生成用于第一驱动装置21驱动内下圈12相对于外下圈11绕第一轴线a1转动第一旋转角α
10
的第一控制信号、用于第二驱动装置22驱动内上圈13相对于内下圈12绕第二轴线a2转动第二旋转角α
20
的第二控制信号、用于第三驱动装置23驱动外上圈14相对于内上圈13绕第一轴线a1转动第三旋转角α
30
的第三控制信号。
52.第一驱动装置21驱动内下圈12相对于外下圈11绕第一轴线a1转动和第二驱动装置22驱动内上圈13相对于内下圈12绕第二轴线a2转动用于调节外上圈14的上端面与外下圈11的下端面的第二夹角。同时,为了确保调节过程安全可靠,降低对作业装置后续工作的影响,作业装置在调节前后不应相对于作业车辆的前进方向发生偏转。第三驱动装置23驱动外上圈14相对于内上圈13绕第一轴线a1转动用于使作业装置在调节前后在作业车辆的前进方向上不发生偏转。
53.基于此,上述实施例中,第一驱动装置21驱动内下圈12相对于外下圈11绕第一轴线a1转动第一旋转角α
10
时,内上圈13和外上圈14随内下圈12一同转动第一旋转角α
10
;第二
驱动装置22驱动内上圈13相对于内下圈12绕第二轴线a2转动第二旋转角α
20
时,外上圈14随内上圈13一同转动第二旋转角α
20
。为了将外上圈14的上端面由相对于水平面成待校正角度γ的状态调节至水平状态,第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
满足:α
10
=α
d0
,α
10
+α
20
=α
u0
,α
10
+α
20
+α
30
=0。由此可以得到:α
10
=α
d0
,α
20
=α
u0-α
d0
,α
30
=-α
u0
。
54.在一些实施例中,控制器被进一步配置为:根据内下圈12和内上圈13同时旋转的状态下,下旋转角αd、上旋转角αu以及第二夹角的变化量δγ的对应关系以及待校正角度γ,获取下旋转角αd和上旋转角αu的解集,并从解集中选取第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
的绝对值之和最小的一组解作为第一目标值α
d0
和第二目标值α
u0
。
55.上述实施例中,第一驱动装置21第二驱动装置22和第三驱动装置23的旋转角度分别与第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
成比例关系,通过选取使第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
的绝对值之和最小的一组解,可以使第一驱动装置21、第二驱动装置22和第三驱动装置23的旋转角度的绝对值之和最小。
56.在一些实施例中,控制器被进一步配置为:根据第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
的比例关系生成使第一驱动装置21的转速、第二驱动装置22的转速和第三驱动装置23的转速满足比例关系的第一控制信号、第二控制信号和第三控制信号,以使内下圈12、内上圈13和外上圈14同步开始和停止转动。以上设置可以使在将作业装置调节至水平状态的过程中的任意位置,作业装置在作业车辆的前进方向上均不发生偏转。
57.在一些实施例中,控制器被进一步配置为:根据待校正角度γ,获取外上圈14的上端面的法向量在垂直于水平面且沿车体3的长度方向延伸的第一平面内的投影与车体3的高度方向的第三夹角γ
x
和外上圈14的上端面的法向量在垂直于水平面且沿车体3的宽度方向延伸的第二平面内的投影与车体3的高度方向的第四夹角γy,并根据第三夹角γ
x
、第一对应关系、第四夹角γy和第二对应关系,获取下旋转角αd和上旋转角αu的解集。其中,第一对应关系为下旋转角αd、上旋转角αu以及第三夹角γ
x
的变化量δγ
x
的对应关系,第二对应关系为下旋转角αd、上旋转角αu以及第四夹角γy的变化量δγy的对应关系。上述实施例中,外上圈14的上端面的法向量根据待校正角度γ确定,而第三夹角γ
x
和第四夹角γy可由双轴倾角传感器或陀螺仪等倾角检测装置直接获取。
58.在一些实施例中,回转支承驱动装置包括马达和减速机,马达与控制装置信号连接,减速机与马达传动连接且与回转支承驱动连接。
59.在一些实施例中,马达为液压马达,控制装置还包括与液压马达连接且与控制器信号连接的控制阀,控制器被进一步配置为生成控制阀的开度控制信号,控制阀被配置为根据开度控制信号调节马达的流量以调节马达的转速。
60.在一些实施例中,作业装置控制系统还包括与控制器信号连接的转角检测装置,转角检测装置被配置为检测减速机转过的角度,控制器被进一步配置为根据减速机转过的角度获取内下圈12转过的角度、内上圈13转过的角度和外上圈14转过的角度,以判断外上圈14的上端面是否达到水平状态。
61.图1所示的实施例中,第一驱动装置21包括第一马达和第一减速机,第二驱动装置22包括第二马达和第二减速机,第三驱动装置23包括第三马达和第三减速机,各减速机可采用蜗轮蜗杆减速机。控制装置包括与控制器信号连接的第一控制阀、第二控制阀、第三控制阀。转角检测装置包括第一编码器、第二编码器和的第三编码器。采用回转支承1调节作
业装置相对于水平面的姿态时,控制器获取倾角检测装置检测的第一倾角φ获取待校正角度γ,进而获取第一目标值α
d0
和第二目标值α
u0
,进而获取第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
,并向第一控制阀发送第一控制信号、向第二控制阀发送第二控制信号、向第三控制阀发送第三控制信号,第一驱动装置21、第二驱动装置22和第三驱动装置23分别驱动内下圈12、内上圈13和外上圈14转动的同时,第一编码器、第二编码器和第三编码器分别实时监测第一减速机、第二减速机和第三减速机的转过的角度并将角度数据反馈至控制器,以获取内下圈12相对于外下圈11转过的角度、内上圈13相对于内下圈12转过的角度和外上圈14相对于内上圈13转过的角度,通过pid闭环控制算法确保调节过程中的精度要求。
62.在一些实施例中,姿态调节装置还包括支腿5,驱动装置还包括与支腿5驱动连接的支腿驱动装置,支腿5用于沿车体3的高度方向可伸缩地设置,以在支腿驱动装置驱动下调节外上圈14的上端面的倾角。
63.在设置回转支承1和支腿5的基础上,为了调节回转支承的外上圈的上端面与水平面的夹角从而调节作业装置相对于水平面的姿态,可以单独采用驱动支腿伸缩调节第一倾角φ的方式,也可以单独采用驱动回转支承中内下圈和内上圈转动调节第二夹角的方式。由于车辆行驶过程中对结构尺寸的限制,单独采用一种调节方式获得的夹角调节范围有限,为了获得更大的夹角调节范围,还可以采用上述两种方式的组合,既驱动支腿动作又驱动回转支承动作,以适应在坡度较大地面驻车时调平作业装置的需求。
64.在一些实施例中,控制器被进一步配置为:判断车体3相对于水平面的第一倾角φ与支腿最大调节角度α的大小,支腿最大调节角度α表示通过驱动支腿5动作的方式能够校正的外上圈14的上端面相对于水平面的夹角的最大值,若第一倾角φ小于或等于支腿最大调节角度α,生成用于驱动支腿5动作的第一支腿控制信号,以将外上圈14的上端面调节至水平状态,若第一倾角φ大于支腿最大调节角度α,生成用于驱动支腿5动作的第二支腿控制信号,以将外上圈14的上端面向第一倾角φ的相反方位转动支腿最大调节角度α,并生成回转支承控制信号,以将外上圈14的上端面由相对于水平面成待校正角度γ的状态调节至水平状态,其中,以向第一倾角φ的相反方位转动支腿最大调节角度α之后外上圈14的上端面相对于水平面的第二倾角φ-α作为待校正角度γ。
65.上述实施例中,当作业车辆的驻车位置坡度较大时,即第一倾角φ较大时,为了将作业装置调节至水平状态,先通过驱动支腿动作,将外上圈14的上端面由与水平面成第一倾角φ的状态调节至与水平面成第二倾角φ-α的状态,再通过驱动回转支承动作,将外上圈14的上端面由与水平面成第二倾角φ-α的状态调节至水平状态。上述实施例中作业装置控制系统的设置利于增强作业车辆对作业装置的调平能力。
66.本公开的一些实施例还提供一种前述作业装置控制系统的作业装置控制方法,包括:获取待校正角度γ;根据内下圈12和内上圈13同时旋转的状态下,下旋转角αd、上旋转角αu和第二夹角的变化量δγ的对应关系以及待校正角度γ,获取使多个回转支承驱动装置的旋转角度的绝对值之和最小的下旋转角αd的第一目标值α
d0
和上旋转角αu的第二目标值α
u0
;根据第一目标值α
d0
和第二目标值α
u0
,驱动回转支承1动作,将外上圈14的上端面由相对于水平面成待校正角度γ的状态调节至水平状态。
67.如图2至图5所示,本公开的实施例提供的作业装置控制方法基于本公开实施例提供的作业装置控制系统实现,因此具有本公开实施例的作业装置控制系统所具有的优点。
68.在一些实施例中,多个回转支承驱动装置包括第一驱动装置21、第二驱动装置22和第三驱动装置23,第一驱动装置21与内下圈12驱动连接,用于驱动内下圈12相对于外下圈11绕第一轴线a1转动,第二驱动装置22与内上圈13驱动连接,用于驱动内上圈13相对于内下圈12绕第二轴线a2转动,第三驱动装置23与外上圈14驱动连接,用于驱动外上圈14相对于内上圈13绕第一轴线a1转动。根据第一目标值α
d0
和第二目标值α
u0
,驱动回转支承1动作,将外上圈14的上端面由相对于水平面成待校正角度γ的状态调节至水平状态包括:根据第一目标值α
d0
和第二目标值α
u0
,获取第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
,其中,第一旋转角α
10
表示第一驱动装置21驱动内下圈12相对于外下圈11绕第一轴线a1转过的角度,第二驱动装置22驱动第二旋转角α
20
表示内上圈13相对于内下圈12绕第二轴线a2转过的角度,第三旋转角α
30
表示第三驱动装置23驱动外上圈14相对于内上圈13绕第一轴线a1转过的角度。
69.第一目标值α
d0
、第二目标值α
u0
、第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
的具体对应关系可参考前面的相关描述。
70.在一些实施例中,获取使多个回转支承驱动装置的旋转角度的绝对值之和最小的第一目标值α
d0
和第二目标值α
u0
包括:根据内下圈12和内上圈13同时旋转的状态下,下旋转角αd、上旋转角αu和第二夹角的变化量δγ的对应关系以及待校正角度γ,获取下旋转角αd和上旋转角αu的解集;从解集中选取第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
的绝对值之和最小的一组解作为第一目标值α
d0
和第二目标值α
u0
。
71.上述实施例中,第一驱动装置21第二驱动装置22和第三驱动装置23的旋转角度分别与第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
成比例关系,通过选取使第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
的绝对值之和最小的一组解,可以使第一驱动装置21、第二驱动装置22和第三驱动装置23的旋转角度的绝对值之和最小。
72.在一些实施例中,作业装置控制方法还包括:根据第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
的比例关系确定第一驱动装置21、第二驱动装置22和第三驱动装置23的转速的比例关系,以使内下圈12、内上圈13和外上圈14同步开始和停止转动。以上设置可以使在将作业装置调节至水平状态的过程中的任意位置,作业装置在作业车辆的前进方向上均不发生偏转。
73.在一些实施例中,作业装置控制方法还包括:获取内下圈12和内上圈13同时旋转的状态下,下旋转角αd、上旋转角αu和第二夹角的变化量δγ的对应关系,包括:获取下旋转角αd、上旋转角αu以及外上圈14的上端面的法向量在垂直于水平面且沿车体3的长度方向延伸的第一平面内的投影与车体3的高度方向的第三夹角γ
x
的变化量δγ
x
的第一对应关系;和获取下旋转角αd、上旋转角αu以及外上圈14的上端面的法向量在垂直于水平面且沿车体3的宽度方向延伸的第二平面内的投影与车体3的高度方向的第四夹角δγy的变化量δγy的第二对应关系。
74.在一些实施例中,根据内下圈12和内上圈13同时旋转的状态下,下旋转角αd、上旋转角αu和第二夹角的变化量δγ的对应关系以及待校正角度γ,获取使多个回转支承驱动装置的旋转角度的绝对值之和最小的第一目标值α
d0
和第二目标值α
u0
包括:根据待校正角度γ,获取第三夹角γ
x
和第四夹角γy;根据第三夹角γ
x
和第一对应关系、根据第四夹角γy和第二对应关系,获取下旋转角αd和上旋转角αu的解集。
75.在一些实施例中,待校正角度γ小于或等于5
°
且第一夹角θ小于或等于5
°
时,第一对应关系和第二对应关系表示为:,,其中,δγ
dx
表示内下圈12绕第一轴线a1转过下旋转角αd时,内下圈12的上端面的法向量n2在第一平面内的投影与车体3的高度方向的夹角的变化量,δγ
dx
=sinαd∙
θ,δγ
dy
表示内下圈12绕第一轴线a1转过下旋转角αd时,内下圈12的上端面的法向量n2在第二平面内的投影与车体3的高度方向的夹角的变化量,δγ
dy
=(cosα
d-1)
∙
θ,δγ
ux
表示内上圈13绕第二轴线a2转过上旋转角αu时,内上圈13的上端面的法向量n4在的第一平面内的投影与车体3的高度方向的夹角的变化量,δγ
ux
=-sinαu∙
θ,δγ
uy
表示内上圈13绕第二轴线a2转过上旋转角αu时,内上圈13的上端面的法向量n4在第二平面内的投影与车体3的高度方向的夹角的变化量,δγ
uy
=-(cosα
d-1)
∙
θ。
76.下面结合图2至图4对得出第一对应关系和第二对应关系的过程做详细说明。
77.建立内下圈坐标系和内上圈坐标系。其中,内下圈坐标系oxyz以内下圈12的下端面作为xoy平面,x轴沿车体3的宽度方向延伸,y轴沿车体3的长度方向延伸、z轴沿车体3的高度方向延伸,由内下圈坐标系oxyz绕y轴旋转第一夹角θ,并以内上圈13的下端面作为x’oy’平面,得到内上圈坐标系ox’y’z’。
78.记回转支承的内下圈12的下端面的法向量为n1,内下圈的上端面的法向量为n2,内上圈13的下端面的法向量为n3,内上圈13的上端面的法向量为n4。由回转支承1的结构可知,内下圈12的下端面和上端面的夹角、内上圈13的下端面和上端面的夹角等于第一夹角θ。
79.1、内下圈12绕第一轴线a1转过的角度为下旋转角αd而内上圈13绕第二轴线a2不回转,即n2绕n1旋转αd时,旋转后的向量n
2r
满足公式(1):
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1),其中,n
2r’表示n
2r
转置后的列向量;n2’
表示n2转置后的列向量;r为根据罗德里格斯旋转公式(rodrigues
’ꢀ
rotation formula)得到的旋转矩阵,旋转矩阵r满足公式(2):
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)。
80.公式(2)中,i为单位矩阵,k为与n1有关的系数矩阵,设n1=[k
x
, ky, kz],则
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)。
[0081]
在外下圈11的下端面与外上圈14的上端面平行的初始状态下,n1=[0,0,1],n2=[sinθ,0,cosθ]。由公式(1)~(3)计算可得
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)。
[0082]
设n
2r
在第一平面内的投影与车体3的高度方向的夹角,即n
2r
在内下圈坐标系的
yoz平面与z轴的夹角为γ
dx
,设n
2r
在第二平面内的投影与车体3的高度方向的夹角,即n
2r
在内下圈坐标系的xoz平面与z轴夹角为γ
dy
,则有
ꢀꢀꢀꢀꢀ
(5)。
[0083]
由于内下圈12的下端面和上端面的夹角以及内上圈13的下端面和上端面的夹角过大将导致回转支承整体的高度较大,进而影响作业车辆的行驶高度,因此第一夹角θ通常限制在5
°
以内。而n2绕n1旋转的过程中,第一夹角θ为n2与z轴的夹角,γ
dx
、γ
dy
分别为n2在第一平面内的投影和第二平面内的投影与z轴的夹角,因此,γ
dx
≤θ≤5
°
,γ
dy
≤θ≤5
°
。此时tanθ≈ θ,tanγ
dx
≈ γ
dx
,tanγ
dy
≈ γ
dy
,可将公式(5)简化为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)。
[0084]
因此内下圈12绕第一轴线a1转过的角度为下旋转角αd后,内下圈12的上端面的法向量n2在第一平面内的投影与车体3的高度方向的夹角的变化量δγ
dx
和内下圈12的上端面的法向量n2在第二平面内的投影与车体3的高度方向的夹角的变化量δγ
dy
可表示为
ꢀꢀꢀꢀꢀꢀꢀꢀ
(7)。
[0085]
2、内下圈12绕第一轴线a1不回转而内上圈13绕第二轴线a2转过的角度为上旋转角αu,即n4绕n3旋转αd时,在外下圈11的下端面与外上圈14的上端面平行的初始状态下,n3=n2=[0,0,1],n4=[-sinθ,0,cosθ]。参考公式(1)~(6)的计算过程,类似地,内上圈13的上端面的法向量n4在的第一平面内的投影与车体3的高度方向的夹角的变化量δγ
ux
和内上圈13的上端面的法向量n4在第二平面内的投影与车体3的高度方向的夹角的变化量δγ
uy
可表示为
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)。
[0086]
因此,根据公式(7)和公式(8),当内下圈12绕第一轴线a1转过的角度为下旋转角αd且内上圈13绕第二轴线a2转过的角度为上旋转角αu时,第三夹角γ
x
的变化量δγ
x
和第四夹角γy的变化量δγy满足
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)。
[0087]
公式(9)即为第一对应关系和第二对应关系。
[0088]
在一些实施例中,若单独采用驱动回转支承动作的方式调节作业装置相对于水平
面的姿态,获取待校正角度γ包括:将第一倾角φ作为待校正角度γ。
[0089]
在一些实施例中,姿态调节装置还包括支腿5,支腿5用于沿车体3的高度方向可伸缩地设置以调节车体3的姿态,作业装置控制方法还包括:判断第一倾角φ与支腿最大调节角度α的大小,支腿最大调节角度α表示通过驱动支腿5动作的方式能够校正的外上圈14的上端面相对于水平面的夹角的最大值;若第一倾角φ小于或等于支腿最大调节角度α,驱动支腿5动作,将外上圈14的上端面调节至水平状态;若第一倾角φ大于支腿最大调节角度α,驱动支腿5动作,将外上圈14的上端面向第一倾角φ的相反方位转动支腿最大调节角度α,获取待校正角度γ包括:将向第一倾角φ的相反方位转动支腿最大调节角度α之后外上圈14的上端面相对于水平面的倾角φ-α作为待校正角度γ。
[0090]
下面结合图5进一步说明本公开的实施例的作业装置控制方法的流程。
[0091]
作业车辆在驻车位置驻车并检测驻车位置车体相对于水平面的第一倾角φ,并判断第一倾角φ与支腿最大调节角度α的大小。
[0092]
若第一倾角φ小于或等于支腿最大调节角度α,驱动支腿5动作,将外上圈14的上端面调节至水平状态。此时可以将作业车辆的动力源切换至作业装置,并驱动作业装置执行作业。
[0093]
若第一倾角φ大于支腿最大调节角度α,驱动支腿5动作,将外上圈14的上端面向第一倾角φ的相反方位转动支腿最大调节角度α,将向第一倾角φ的相反方位转动支腿最大调节角度α之后外上圈14的上端面相对于水平面的倾角φ-α作为待校正角度γ。
[0094]
根据待校正角度γ获取第三夹角γ
x
和第四夹角γy,待校正角度γ和第二夹角的变化量δγ大小相等,方向相反,因此,令
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)。
[0095]
根据公式(9)和(10)获取下旋转角αd和上旋转角αu的解集,由于反三角函数为多值函数,为便于作业装置调节,将角度范围限定于[-180
°
,180
°
)区间内,求解可得两组解分别为α
u1
、α
d1
及α
u2
、α
d2
。其中,α
u1
、α
d1
对应的第一旋转角α
10
=α
d1
,第二旋转角α
20
=α
u1-α
d1
,第三旋转角α
30
=-α
u1
;α
u2
、α
d2
对应的第一旋转角α
10
=α
d2
,第二旋转角α
20
=α
u2-α
d2
,第三旋转角α
30
=-α
u2
。
[0096]
从两组解中选取第一旋转角α
10
、第二旋转角α
20
和第三旋转角α
30
的绝对值之和|αd|+|α
u-αd|+|-αu|最小的一组解作为第一目标值α
d0
和第二目标值α
u0
。对公式(9)进行三角函数和差化积变形可得|α
u1-α
d1
|=|α
u2-α
d2
|,因此选取|αu|+|αd|较小的一组解作为第一目标值α
d0
和第二目标值α
u0
。
[0097]
第一驱动装置21驱动内下圈12相对于外下圈11绕第一轴线a1转动第一旋转角α
10
,第二驱动装置22驱动内上圈13相对于内下圈12绕第二轴线a2转动第二旋转角α
20
,第三驱动装置23驱动外上圈14相对于内上圈13绕第一轴线a1转动第三旋转角α
30
,以将外上圈14的上端面调节至水平状态。此时可以将作业车辆的动力源切换至作业装置,并驱动作业装置执行作业。
[0098]
调节过程中,第一驱动装置21的第一控制阀、第二驱动装置22的第二控制阀和第三驱动装置23的第三控制阀的开度控制信号的比例关系为|αd|:|α
u-αd|:|αu|,以使内下圈
12、内上圈13和外上圈14同步开始和停止转动。
[0099]
在一些实施例中,在上面所描述的控制器可以实现为用于执行本公开所描述功能的通用处理器、可编程逻辑控制器(programmable logic controller,简称:plc)、数字信号处理器(digital signal processor,简称:dsp)、专用集成电路(application specific integrated circuit,简称:asic)、现场可编程门阵列(field-programmable gate array,简称:fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件或者其任意适当组合。
[0100]
最后应当说明的是:以上实施例仅用以说明本公开的技术方案而非对其限制;尽管参照较佳实施例对本公开进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本公开的具体实施方式进行修改或者对部分技术特征进行等同替换,其均应涵盖在本公开请求保护的技术方案范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1