一种基于数据链测距的三领队高低配异质无人机编队三维协同定位方法
1.本发明涉及一种基于数据链测距的三领队高低配异质无人机编队三维协同定位方法。
背景技术:
2.随着体系作战的不断推进,攻防博弈此消彼长,精确制导无人飞行器是蓝方的强力攻击手段之一,其能否实现对敌威慑很大程度取决于导航制导系统的可靠程度。然而,随着红方防御体系的不断完善,拦截系统的优化使得突防难度提升,加之战场前端的gps拒止或降级环境很大程度上影响了导航系统的正常工作,精确制导无人飞行器需要克服恶劣前端环境锁定带有干扰的目标难上加难。因此,为保证精确制导无人飞行器的导航制导系统正常工作,必不可少的技术升级必将带来成本问题进而造成生产压力。
3.高性能无人机如不能一击必中则会前功尽弃,而无人机编队则可通过协同配合提升突防概率和打击成功率。但数量的增加不意味着质量的提高甚至可能会造成反效果,因此如何通过调整编队构成压缩编队成本提升协同质量才是索敌制胜的关键。随着网络通信技术的不断发展,编队的灵活性得到了极大的提升,高配与低配无人机异质编队协同成为可能。导引头作为制导系统的核心组成部分占据全无人机制造成本的三成以上,因此借助高性能无人机与低配无人机配合形成编队能够极大的降低编队规模扩大带来的成本叠加,转数量优势为质量优势。考虑到前端战场复杂的干扰对抗环境,导引头和gps的正常工作必然受到影响,无人机的定位难以保障。因此,从低成本化的核心目标出发,如何结合网络通信技术调整编队构成实现高低配无人机编队中低成本无人机的协同定位亟待解决。
4.目前,对异质无人机编队基于数据链测距完成协同定位的理论研究成果鲜有报道,包含低配无人机的异质编队三维协同定位理论急需进行理论突破。因此,本发明针对三领队高低配异质无人机编队,提出一种基于数据链通信的三维高低配异质编队协同定位方法。
技术实现要素:
5.针对目前对研究尚不充分的高低配异质编队三维协同定位技术,本发明基于三领队高低配异质编队构成,提供一种基于数据链通信的高低配异质编队三维协同定位方法。该方法首先构建三高性能领队-低性能低成本无人机架构下的数据链通信关系,在此基础上根据数据链测得的低成本无人机间相对距离和领低成本无人机间相对距离构建非线性方程组,结合作战后端能够准确获取的低成本无人机初始位置信息利用最优化方法求解低成本低成本无人机位置信息用于协同作战。该方法易于施用,需要领队位置信息、数据链测距信息和初始时刻的低成本无人机位置信息即可在线解算低成本无人机的位置信息,协同定位结果可与通信网络和协同制导律配合使用。
6.按以下设计步骤对本发明作详细说明。
7.步骤一、构建三领队高低配异质编队
8.高性能领队分别记为1号无人机、2号无人机和3号无人机实时更新准确位置坐标为(x1,y1,z1),(x2,y2,z2)和(x3,y3,z3)。
9.低性能低成本无人机记为4号无人机、5号无人机和6号无人机,对应坐标位置未知记为(x
p
,y
p
,z
p
),p=4,5,6,其中初始时刻位于作战后端,低性能低成本无人机初始时刻位置信息已知记为(x
p0
,y
p0
,z
p0
)。
10.步骤二、构建三领队高低配异质编队通信网络
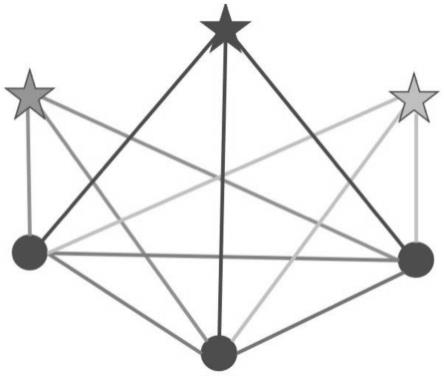
11.数据链通信结构如图1所示,保证每一个领队与所有低成本无人机之间的网络通信,3个低成本低成本无人机之间保证无向全连通。
12.数据链测距获取的无人机机间相对距离记为r
pq
其中p≠q且r
pq
=r
pq
,p,q=1,2,...,6。即有
[0013][0014]
选定一计算中心节点通过网络收集所有机间距并进行位置信息解算后利用数据链通信将解算结果反馈至各个低成本无人机处。
[0015]
步骤三、构建三领队高低配异质无人机编队协同定位方程组
[0016]
令px=(x4,x5,x6,y4,y5,y6,z4,z5,z6)给定无人机群初始位置信息记为px0=(x
40
,x
50
,x
60
,y
40
,y
50
,y
60
,z
40
,z
50
,z
60
),建立包含12个方程的三领队高低配异质无人机编队协同定位非线性方程组如下
[0017]
整理非线性协同定位方程组如下
[0018][0019]
步骤四、求解三领队高低配编队协同定位方程组
[0020]
利用levenberg-marquardt方法求解三领队高低配异质无人机编队协同定位非线性方程组。选定高性能领队计算求解并将各低成本无人机位置信息通过数据链通信发送给对应低成本无人机。给低成本无人机基于更新后的位置信息,结合施用的协同制导律生成制导指令用以完成协同任务。
[0021]
设置算法迭代容差作为最优化算法对应中止条件e。
[0022]
首先,定义优化指标函数f(px)为
[0023]
[0024]
将方程组(3)的求解问题转化为求使得指标函数f(px)最小的px。
[0025]
再者,计算获取f(px)的jacobian矩阵记为j(px),f(x)的梯度向量表示为g(px),f(px)的hessian矩阵表示为h(px),其中每个fi(px)的hessian矩阵表示为di(px)则
[0026][0027]
其中q(px)=∑fi(px)di(px)。
[0028]
再者,构建每次主迭代第k次的最小化问题
[0029][0030]
进一步,求解最小二乘问题的解即为搜索方向dk。给定标量λk控制搜索方向dk,根据以下方程组的解确定搜索方向
[0031][0032]
按以上步骤即可根据levenberg-marquardt算法设置的中止条件从低成本无人机初始位置px0出发进行迭代、求解更新低成本低成本无人机位置信息。各个低成本无人机结合位置信息更新自身状态并根据协同制导律生成控制指令。
[0033]
本发明基于三领队高低配异质编队,结合数据链测距提出一种异质编队三维协同定位方法,利用数据链通信将三个高性能领队和三个低成本低成本无人机构成的异质编队有机地联系在一起,解决目前高低配异质编队中低成本无人机定位的问题。
[0034]
本发明设计的协同定位方法所获取的低成本无人机位置信息能够与多种协同制导方法配合使用,可拓展应用于无人飞行器,亦可通过改进最优化方法,提升非线性协同定位的精度和计算速度,类似的方法尚未见报道,属于原始理论创新,附加优势可通过本发明的实践获得。
附图说明
[0035]
为便于理解和描述,给出框架构建示意图并结合实施方式对其进行解释。
[0036]
图1是三领队高低配编队数据链通信示意图。
[0037]
图2是基于协同定位信息的高低配异质编队协同制导轨迹示意图。
[0038]
图3是基于协同定位信息的协同制导协同状态量到达时间曲线图。
[0039]
图4是协同定位解算位置与非线性仿真解算位置误差。
具体实施方式
[0040]
本发明中提出的三领队高低配异质无人机编队三维协同定位方法,求解通过数据链测距构建的协同定位非线性方程组以获取异质编队中的低成本低成本无人机的位置信息用于后续协同作战。下面详细描述本发明的实施例,所述实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0041]
本实例按照本发明方法设计的协同定位方法实现三领队-三低成本无人机高低配异质无人机编队三维协同定位,为进一步验证定位结果的有效性,将解算获得的位置信息通过协同制导律非线性模型进行仿真验证。
[0042]
目标:初始位置(2000m,1000m,0m)
[0043]
无人机速度均为200m/s。
[0044]
根据本发明给出的高低配无人机编队协同定位进行验证如下:
[0045]
步骤一、构建三领队高低配异质编队
[0046]
非线性仿真过程中领队位置信息实时可知,低成本无人机初始位置精确可知。
[0047]
1号无人机:初始位置(-15000m,7500m,2500m)
[0048]
2号无人机:初始位置(-13600m,8800m,2800m)
[0049]
3号无人机:初始位置(-11500m,12000m,2400m)
[0050]
4号无人机:初始位置(-15000m,4500m,2400m)
[0051]
5号无人机:初始位置(-12500m,8500m,2500m)
[0052]
6号无人机:初始位置(-15500m,-3900m,2500m)
[0053]
步骤二、构建三领队高低配异质编队通信网络
[0054]
构建图1所示数据链通信网络结构,选定一高性能领队通过数据链通信获取每一时刻编队所有机间距和领队位置。
[0055]
步骤三、构建三领队高低配异质无人机编队协同定位方程组
[0056]
根据数据链测距获取的机间距和领队位置构建三领队高低配异构编队协同定位非线性方程组。
[0057]
步骤四、求解三领队高低配编队协同定位方程组
[0058]
使用levenberg-marquardt算法求解高低配异质编队协同定位非线性方程组,设置中止误差e=10-7
并给定标量初始值λ0=10-3
。
[0059]
将求解获得的无人机位置信息带入非线性协同制导仿真,实时更新数据链测距信息和领队信息,根据初始低成本无人机位置和解算协同定位信息求解当前低成本无人机位置信息,根据位置信息计算编队协同所需相关变量生成相应制导指令,利用非线性仿真验证协同定位方法的有效性。
[0060]
图2为三维平面内利用协同定位算法的高低配导引头异质无人机编队打击固定目标轨迹图。图3为利用协同定位信息求解的协同变量到达时间tf曲线图。图4是协同定位解算位置与非线性仿真解算真实位置的位置间距。协同制导律选定飞行到达时间为编队协同变量,将协同定位结算的位置信息带入协同制导律解算,经非线性协同制导仿真验证可知利用协同定位信息,该制导律可实现协同打击。本方法提供的位置信息能够通过网络通信实现高低配异质无人机编队中的低成本无人机定位,为编队协同作战提供了良好的信息基础。
[0061]
该实施案例是对本发明技术方案的解释和说明,仅作示例,以验证基于数据链测距的三领队高低配异质无人机编队三维协同定位方法的有效性,不能以此限定权利保护范围。对于本领域技术人员来说,可在本技术的基于数据链测距的三领队高低配异质无人机编队三维协同定位方法的基础上根据工程实践需求进行若干变化、修改、替换、变型和改进。凡根据本发明权利要求书和说明书所做的仅仅是局部改变的,仍应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1