自行走设备及其设备主体的制作方法
1.本技术涉及自动控制领域,尤其涉及一种自行走设备及其设备主体。
背景技术:
2.自行走设备,比如智能割草机、智能扫雪机、智能落叶清扫机等,通常包括行走单元、动力单元、控制单元、工作单元等,由于产品集成度高,结构较为复杂,组装难度大,成本也相对较高。
技术实现要素:
3.本技术提供一种低成本的自行走设备及其设备主体。
4.具体而言,本技术提供一种自行走设备,所述自行走设备包括设备主体和可拆卸地组装于设备主体的移动终端,所述移动终端包括处理单元及与处理单元电性连接的通讯单元;所述设备主体包括行走单元、与行走单元连接的壳体单元、组装于壳体单元的动力单元、由动力单元驱动的工作单元、与行走单元及动力单元电性连接的控制单元;所述移动终端与所述设备主体组装时,所述处理单元通过通讯单元与所述控制单元通讯连接,配置为通过控制单元控制所述行走单元和动力单元。
5.进一步的,所述移动终端包括传感器单元,所述传感器单元与所述处理单元电性连接,配置为检测自行走设备周围的环境信息,所述处理单元接收环境信息,并根据环境信息向控制单元发送控制指令。
6.进一步的,所述传感器单元包括摄像头,所述摄像头配置为获取所述自行走设备周围的环境图像,所述处理单元根据环境图像获取工作区和非工作区的边界,并通过控制单元控制行走单元在工作区内运动。
7.进一步的,所述处理单元对环境图像与预设图像进行对比,识别环境图像中的工作区和非工作区的边界;所述预设图像包括预设工作区和预设非工作区。
8.进一步的,所述传感器单元包括第一摄像头及第二摄像头,所述第一摄像头配置为获取第一方向上的第一图像,所述第二摄像头配置为获取第二方向上的第二图像,所述第一方向异于第二方向;所述处理单元根据第一图像与第二图像的差异,获取工作区和非工作区的边界。
9.进一步的,所述传感器单元包括定位传感器,所述定位传感器配置为获取所述自行走设备的位置信息;所述处理单元配置为接收自行走设备的位置信息,并向控制单元发送调节行走方向和/或行走速度的控制指令。
10.进一步的,所述传感器单元包括姿态传感器,所述姿态传感器配置为获取自行走设备的姿态;所述处理单元配置为接收自行走设备的姿态,并向控制单元发送姿态调整的控制指令。
11.进一步的,所述通讯单元包括有线通讯模块和无线通讯模块,所述有线通讯模块在移动终端与设备主体组装时与控制单元实现通讯连接和机械连接,所述无线通讯模块配
置为进行无线通讯。
12.进一步的,所述无线通讯模块配置为接收遥控设备的遥控信号,所述处理单元根据遥控信号向所述控制单元发送控制指令。
13.另一方面,本技术还提供一种自行走设备的设备主体,可与移动终端可拆卸地组装,其特征在于,所述设备主体包括行走单元、与行走单元连接的壳体单元、组装于壳体单元的动力单元、由动力单元驱动的工作单元、与行走单元及动力单元电性连接的控制单元及通讯接口;所述通讯接口配置为在移动终端与所述设备主体组装时建立通讯连接,所述控制单元通过所述通讯接口接收控制指令,控制所述行走单元和动力单元。
14.处理单元模块化便于组装,有利于提高共用性,可组装于自行走设备的设备主体上,降低设计风险和生产成本,有效提高生产效率。
附图说明
15.图1是本技术自行走设备的立体示意图。
16.图2是图1所示的自行走设备的部分分解图。
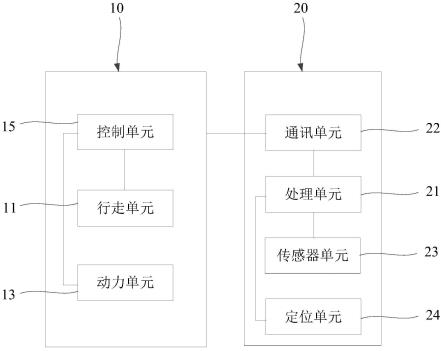
17.图3是图1所示的自行走设备的主要模块的控制示意图。
18.图4是图1所示的自行走设备的移动终端的正视示意图。
19.图5是图1所示的自行走设备的移动终端的后视示意图。
具体实施方式
20.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施例并不代表与本技术相一致的所有实施例。
21.在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。除非另作定义,本技术使用的技术术语或者科学术语应当为本技术所属领域内具有一般技能的人士所理解的通常意义。本技术中使用的“第一”“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“多个”或者“若干”表示两个及两个以上。除非另行指出,“前部”、“后部”、“下部”和/或“上部”等类似词语只是为了便于说明,而并非限于一个位置或者一种空间定向。“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而且可以包括电性的连接,不管是直接的还是间接的。在本技术说明书和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
22.本技术提供一种自行走设备,所述自行走设备包括设备主体和可拆卸地组装于设备主体的移动终端,所述移动终端包括处理单元及与处理单元电性连接的通讯模块;所述设备主体包括行走单元、与行走单元连接的壳体单元、组装于壳体单元的动力单元、由动力单元驱动的工作单元、与行走单元及动力单元电性连接的控制单元;所述移动终端与所述
设备主体组装时,所述处理单元通过通讯模块与所述控制单元通讯连接,配置为通过控制单元控制所述行走单元和动力单元。
23.请结合图1及图2,本实施例的自行走设备100为智能割草机,其包括设备主体10和可拆卸地组装于设备主体10的移动终端20,所述设备主体包括行走单元11、由行走单元11支撑的壳体单元12、组装于壳体单元12的动力单元13、由动力单元13驱动的工作单元14、与行走单元11及动力单元13电性连接的控制单元15,所述行走单元11用于驱动自行走设备10进行前进、后退、转弯等动作,动力单元13用于为工作单元14提供动力,工作单元14被驱动后进行割草工作,控制单元15用于接收控制信号,对行走单元11和动力单元13进行控制。本实施例中,动力单元13为电机,行走单元11包括另一电机、由另一电机驱动的主动轮111和随主动轮111一起运动的从动轮112,工作单元13为割草的刀片。本实施例中,移动设备可以是手机、平板电脑等设备,尤其可以是被淘汰的旧款通讯设备,一般而言,手机、平板电脑的多核心处理器的计算能力远强于一般的智能割草机的处理器的计算能力,因此旧款手机、平板电脑足以胜任智能割草机的数据处理。如此,自行走设备无需预装处理单元、通讯单元等元器件,可大幅降低智能割草机的成本,同时将闲置的旧手机、旧平板电脑等设备二次利用,有利于提升对环境的友好度。
24.请结合图3至图5,所述移动终端20包括处理单元21及与处理单元21电性连接的通讯单元22。所述移动终端20与所述设备主体10组装时,所述处理单元21通过通讯单元22与所述控制单元15通讯连接,配置为通过控制单元15控制所述行走单元11和动力单元13。
25.所述移动终端20还包括传感器单元23,所述传感器单元23与所述处理单元21电性连接,配置为检测自行走设备100周围的环境信息,所述处理单元21接收环境信息,并根据环境信息向控制单元15发送控制指令,进行控制行走单元11和动力单元13。当然,移动终端20还可包括显示屏24、电池、存储器等结构,这里不再一一细述。
26.可选的,所述传感器单元23包括摄像头,所述摄像头配置为获取所述自行走设备周围的环境图像,所述处理单元21根据环境图像获取工作区和非工作区的边界。在一个实施例中,可在设备主体10或移动终端20内预存工作区或非工作区的图像,将环境图像和预存的图像进行对比,识别环境图像的工作区和非工作区,进而获取工作区和非工作区的边界。在其他实施例中,可直接对环境图像进行机器学习(例如工作区为花园,非工作区包含了树木、马路等),通过机器学习识别工作区和非工作区的边界。
27.优选的,所述传感器单元23包括第一摄像头231及第二摄像头232,所述第一摄像头231配置为获取第一方向上的第一图像,所述第二摄像头232配置为获取第二方向上的第二图像,所述第一方向异于第二方向;所述处理单元21根据第一图像与第二图像的差异,获取工作区和非工作区的边界。可选的,移动终端20为手机,第一摄像头231及第二摄像头232分别为手机的前置摄像头及后置摄像头,即本实施例的第一方向和第二方向朝向相反。
28.所述传感器单元23还可以包括定位传感器(未图示),所述定位传感器用于获取自行走设备(设备主体)的位置信息,定位传感器233可以是卫星定位(例如gps、gnss、北斗等)传感器、超声波传感器等。可选的,定位传感器采用北斗高精度gnss rtk与惯导组合导航,以次改善以往割草机在应用限制和精度方面的问题,使割草机在正常空旷环境下到达厘米级的轨迹行使,同时结合惯导的组合导航,惯性导航技术,通过陀螺和加速度计测量载体的角速率和加速度信息,经积分运算得到载体的速度和位置信息,在树下、房角等遮挡的区域
也能达到理想的使用效果。
29.可选的,所述传感器单元23包括姿态传感器234,所述姿态传感器234配置为获取自行走设备的姿态,所述处理单元配置为接收自行走设备的姿态,并向控制单元发送姿态调整的控制指令。例如检测到自行走设备发生偏斜,控制单元及时做出调整,使得自行走设备恢复正常姿态。
30.所述通讯单元22包括有线通讯模块和无线通讯模块,所述有线通讯模块在移动终端2与设备主体1组装时与控制单元15电性连接,所述无线通讯模块配置为进行无线通讯。例如,所述无线通讯模块配置为接收遥控设备的遥控信号,所述处理单元21根据遥控信号向所述控制单元15发送控制指令,控制单元控制设备主体进行行走、转弯、开始工作、停止工作等。遥控设备例如为手机、平板电脑等设备,允许用户远程主动控制自行走设备。所述有线通讯模块221例如为usb接口、type-c接口、lighting接口等,无线通讯模块222例如为蜂窝数据模块、wifi模块、蓝牙模块等。
31.有线通讯模块221实现通讯连接的同时,还实现了移动终端20与设备主体10的机械连接。可选的,所述壳体单元12形成有收纳移动终端20的收容腔,设备主体10对应设有设置于收容腔内的通讯接口(未图示),用于与有线通讯模块建立连接(机械连接和通讯连接)。优选的,壳体单元12还可设置盖体,用于封闭容纳移动终端20的收容腔120,以避免自行走设备在户外工作时雨雪进入收容腔120而造成设备短路,从而提升自移动设备的可靠性。
32.处理单元模块化便于组装,有利于提高共用性,可组装于自行走设备的设备主体上,降低设计风险和生产成本,有效提高生产效率。
33.以上所述仅是本技术的较佳实施例而已,并非对本技术做任何形式上的限制,虽然本技术已以较佳实施例揭露如上,然而并非用以限定本技术,任何熟悉本专业的技术人员,在不脱离本技术技术方案的范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本技术技术方案的内容,依据本技术的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本技术技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1