基于自适应动态规划的四旋翼视觉伺服控制方法
1.本发明涉及智能控制技术领域,尤其涉及一种基于自适应动态规划的四旋翼视觉伺服控制方法。
背景技术:
2.四旋翼无人机以其灵活性强、可垂直升降、可空中悬停等优良特性在军事领域、工业智能化领域、影视航拍领域均有着广泛应用。为完成既定任务,大部分无人机均配载摄像头作为视觉传感器,这类系统通常被称为四旋翼的视觉伺服系统。
3.随着对四旋翼需完成的任务要求不断提高,在视觉伺服控制过程中,存在着以下问题:(1)四旋翼无人机是一类特殊的机器人,通常来说,为了对机器人视觉伺服系统进行控制需要基于系统模型。因此,图像特征的选取、四旋翼视觉伺服模型的构建与处理是需要考虑的首要问题。(2)由于四旋翼无人机的系统模型具有强耦合、非线性、欠驱动特征,现有传统控制方法的控制效果不理想。(3)将四旋翼视觉伺服系统视作最优控制问题求解时,控制输入为横向欧拉角,由于四旋翼机械结构的限制,它的控制输入受到约束,将问题转化为更加复杂的输入约束问题。(4)在针对四旋翼视觉伺服系统设计最优控制律时,由于系统存在的各个方向的耦合性,使得系统是时变的。时变系统的最优控制问题需要求解时变哈密尔顿-雅可比-贝尔曼(hjb)方程,它对应的是一个偏微分方程,目前无法直接求取这类方程的解析解。
4.因此,研究一种基于自适应动态规划的四旋翼视觉伺服控制方法是目前亟需解决的问题。
技术实现要素:
5.为解决上述技术问题,本发明公开了一种基于自适应动态规划的四旋翼视觉伺服控制方法。
6.为实现上述目的,本发明采用下述技术方案:
7.根据本发明的第一方面,提供了一种基于自适应动态规划的四旋翼视觉伺服控制方法。
8.在一个实施例中,一种基于自适应动态规划的四旋翼视觉伺服控制方法,包括以下步骤:
9.构建图像动力学模型;
10.四旋翼视觉伺服模型的构建与处理;
11.基于反步法的高度子系统和偏航子系统控制;
12.基于自适应动态规划算法的横向子系统控制。
13.可选地,所述构建图像动力学模型的步骤包括:
14.建立相机坐标系和图像平面;
15.基于透视投影模型表征图像平面像素点坐标;
16.选取图像矩特征表征图像特征点;
17.构建图像动力学模型。
18.可选地,所述建立相机坐标系和图像平面的步骤包括:建立相机坐标系和虚拟相机坐标系,基于相机坐标系和虚拟相机坐标系的投影区域,构建图像平面和虚拟图像平面。
19.可选地,所述基于透视投影模型表征图像平面像素点坐标的步骤包括:基于相机坐标系和图像平面的定义,表征三维坐标点在相机坐标系和虚拟相机坐标系中的动力学;利用透视投影模型,将三维坐标点转换至虚拟图像平面上的像素坐标;选取零阶、一阶和二阶图像矩特征的组合表示六自由度物体的水平运动、纵向运动和偏航运动。
20.可选地,所述四旋翼视觉伺服模型的构建与处理的步骤,包括:
21.双坐标系建立;
22.构建四旋翼刚体动力学模型;
23.构建四旋翼视觉伺服模型;
24.进行子系统拆分。
25.可选地,所述双坐标系建立的步骤,包括:构建惯性坐标系和四旋翼机体坐标系,并获取坐标系间的转换矩阵,然后描述四旋翼线速度和角速度动力学方程。
26.可选地,所述构建四旋翼刚体动力学模型的步骤,包括:基于牛顿-欧拉方程,构建四旋翼的六自由度刚体动力学方程,得到四旋翼刚体动力学模型,基于小角度近似原理,对所述四旋翼刚体动力学模型进行简化。
27.可选地,所述构建四旋翼视觉伺服模型的步骤,包括:将四旋翼刚体动力学模型和图像动力学模型相结合,构建四旋翼视觉伺服模型。
28.可选地,所述进行子系统拆分的步骤,包括:通过对四旋翼视觉伺服模型进行水平、纵向和偏航方向的拆分,获得横向子系统、高度子系统和偏航子系统。
29.可选地,所述基于反步法的高度子系统和偏航子系统控制的步骤,包括:
30.基于反步法的高度子系统控制律设计;
31.偏航子系统控制律设计;
32.实验仿真。
33.可选地,所述基于反步法的高度子系统控制律设计的步骤,包括:基于高度子系统动力学模型,将高度方向图像特征误差和高度方向线速度视作系统状态,总升力视作高度子系统控制输入;以高度方向图像特征误差为跟踪误差,定义二次型李雅普诺夫函数;通过确保李雅普诺夫函数的导数半正定,保证高度子系统的系统稳定性,反推出高度方向线速度与跟踪误差的关系表达式,基于此定义新的跟踪误差,定义新的二次型李雅普诺夫函数;通过确保李雅普诺夫函数的导数半正定,保证高度子系统的系统稳定性,反推出总升力的表达式,即高度子系统控制律。
34.可选地,所述偏航子系统控制律设计的步骤,包括:将偏航方向图像特征误差作为系统状态,偏航角的导数作为偏航子系统控制输入;基于基础反馈控制,推导出偏航子系统控制律。
35.可选地,所述基于自适应动态规划算法的横向子系统控制的步骤包括:
36.解决横向子系统的最优控制问题;
37.时变hjb方程求解;
38.基于自适应动态规划的控制设计;
39.稳定性证明;
40.实验仿真。
41.可选地,所述解决横向子系统的最优控制问题的步骤,包括:基于横向子系统动力学模型,将水平方向的图像特征误差和水平方向线速度作为系统状态,滚转角和俯仰角作为控制输入,获得标称的时变状态空间方程;由于四旋翼的机械结构影响和小角度近似原理,欧拉角的变化受到约束,进而将横向子系统控制律求解转换为带输入约束的最优控制问题求解;基于状态量的二次型和控制量的非二次型,定义效用函数,得到性能指标函数;基于性能指标函数,定义时变值函数,提出对应的非线性李雅普诺夫函数;基于最优值函数和最优控制律同时满足非线性李雅普诺夫函数的原理,提出时变hjb方程,通过进行时间微分,得到用最优值函数表示的最优控制律;将最优控制律的表达式代入时变hjb方程,得到hjb方程新的表达式。
42.可选地,所述时变hjb方程求解的步骤,包括:将状态变量和时间变量组合为一个状态-时间对,作为时变神经网络的输入,基于神经网络的逼近性质,估计时变的最优值函数;分别对近似最优值函数求取关于状态量和时间变量的偏导数,代入到时变hjb方程中,得到估计的时变hjb方程,得到相应的权值误差,以权值误差二次型作为目标函数,基于梯度下降法,求解神经网络的权值更新律,在权值更新律中加入特殊符号函数,以保证状态量的收敛性。
43.可选地,所述稳定性证明的步骤,包括:基于所提出的权值更新律,推导权值误差动力学;通过定义最优值函数、权值误差二次型和特殊符号函数为李雅普诺夫函数,分别对三项正定的李雅普诺夫函数进行时间微分的求解,得到保证李雅普诺夫函数的导数满足负定的条件,证明在满足所推导的条件下系统可以实现最终一致有界,保证横向子系统的稳定性,完成时变自适应动态规划算法的稳定性和收敛性证明。
44.根据本发明的第二方面,提供了一种计算机设备。
45.在一些实施例中,一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
46.本发明的有益效果是,
47.1、本发明针对时变值函数无法直接利用神经网络进行近似的问题,提出了一类时变神经网络近似方法,改变了传统方法中只将状态量作为神经网络输入的方式,而是将时间变量和状态量一同作为神经网络的输入,近而估计时变的最优值函数;对估计的最优值函数求偏导,并代入时变hjb方程中,推导出估计的最优控制律;利用估计的时变hjb方程产生的误差,本发明提出了一类基于梯度下降法的权值更新律,同时在权值更新律中加入特殊符号函数项,以保证状态量的收敛。
48.2、本发明针对四旋翼视觉伺服模型的建立和处理问题,提出了图像动力学模型和四旋翼动力学模型的构建方法,并进行结合和子系统拆分处理,可以有效表征基于视觉的四旋翼无人机的动力学;针对四旋翼视觉伺服系统的控制问题,研究了高度子系统、偏航子系统和横向子系统的控制律设计问题,分别给出了相应的控制律,有效实现四旋翼无人机的定点跟踪;基于所提出的三个子系统控制律,进行了实验仿真,验证了所提出的基于自适应动态规划的四旋翼视觉伺服控制方法的有效性。
附图说明
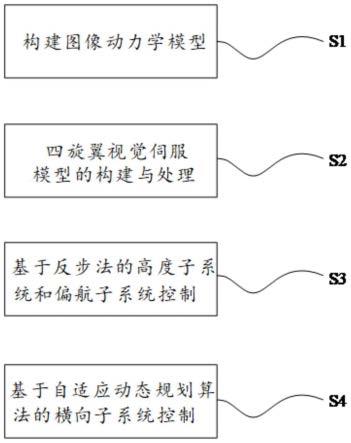
49.图1为本发明所述的一种基于自适应动态规划的四旋翼视觉伺服控制方法的流程图。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.实施例1
52.图1示出了一种基于自适应动态规划的四旋翼视觉伺服控制方法的流程图,如图1所示,包括以下步骤:
53.构建图像动力学模型;
54.四旋翼视觉伺服模型的构建与处理;
55.基于反步法的高度子系统和偏航子系统控制;
56.基于自适应动态规划算法的横向子系统控制。
57.可选地,所述构建图像动力学模型的步骤包括:
58.建立相机坐标系和图像平面;
59.基于透视投影模型表征图像平面像素点坐标;
60.选取图像矩特征表征图像特征点;
61.构建图像动力学模型。
62.针对四旋翼视觉伺服模型的建立和处理问题,本实施例研究了图像动力学模型和四旋翼动力学模型的构建方法,并进行结合和子系统拆分处理。
63.可选地,所述建立相机坐标系和图像平面的步骤,包括:定义相机装载在四旋翼底部质心所在位置,镜头垂直指向正下方。建立相机坐标系和虚拟相机坐标系,相机坐标系以相机中心为原点,指向正前方、正右方和正下方,虚拟相机坐标系的原点与相机坐标系重合,而虚拟相机坐标系俯仰角和滚转角始终为零;基于相机坐标系和虚拟相机坐标系的投影区域,构建图像平面和虚拟图像平面,虚拟图像平面始终平行于水平面。
64.可选地,所述基于透视投影模型表征图像平面像素点坐标的步骤,包括:基于相机坐标系和图像平面的定义,表征三维坐标点在相机坐标系和虚拟相机坐标系中的动力学;利用透视投影模型,将三维坐标点转换至虚拟图像平面上的像素坐标;选取零阶、一阶和二阶图像矩特征的组合表示六自由度物体的水平运动、纵向运动和偏航运动,有效表征四旋翼的运动情况;利用图像矩特征代替图像平面点的坐标信息,定义图像特征误差,构建图像动力学模型。
65.可选地,所述四旋翼视觉伺服模型的构建与处理的步骤,包括:
66.双坐标系建立;
67.构建四旋翼刚体动力学模型;
68.构建四旋翼视觉伺服模型;
69.进行子系统拆分。
70.可选地,所述双坐标系建立的步骤,包括:构建惯性坐标系和四旋翼机体坐标系,并获取坐标系间的转换矩阵,得到坐标系间的转换关系,然后描述四旋翼线速度和角速度动力学方程,得到惯性坐标系下四旋翼的线速度和角速度动力学方程。
71.可选地,所述构建四旋翼刚体动力学模型的步骤,包括:基于牛顿-欧拉方程,构建四旋翼的六自由度刚体动力学方程,得到四旋翼刚体动力学模型,基于小角度近似原理,对所述四旋翼刚体动力学模型进行简化。
72.可选地,所述构建四旋翼视觉伺服模型的步骤,包括:将四旋翼刚体动力学模型和图像动力学模型相结合,构建四旋翼视觉伺服模型。
73.可选地,所述进行子系统拆分的步骤,包括:通过对四旋翼视觉伺服模型进行水平、纵向和偏航方向的拆分,获得横向子系统、高度子系统和偏航子系统。
74.针对四旋翼视觉伺服系统的控制问题,本实施例研究了高度子系统、偏航子系统和横向子系统的控制律设计问题,分别给出了相应的控制律。
75.可选地,所述基于高度子系统和偏航子系统控制的步骤,包括:
76.基于反步法的高度子系统控制律设计;
77.偏航子系统控制律设计;
78.实验仿真。
79.可选地,所述基于反步法的高度子系统控制律设计的步骤,包括:基于高度子系统动力学模型,将高度方向图像特征误差和高度方向线速度视作系统状态,总升力视作高度子系统控制输入;以高度方向图像特征误差为跟踪误差,定义二次型李雅普诺夫函数;通过确保李雅普诺夫函数的导数半正定,保证高度子系统的系统稳定性,反推出高度方向线速度与跟踪误差的关系表达式,基于此定义新的跟踪误差,定义新的二次型李雅普诺夫函数;通过确保李雅普诺夫函数的导数半正定,保证高度子系统的系统稳定性,反推出总升力的表达式,即高度子系统控制律。
80.可选地,所述偏航子系统控制律设计的步骤,包括:将偏航方向图像特征误差作为系统状态,偏航角的导数作为偏航子系统控制输入;基于基础反馈控制,推导出偏航子系统控制律。
81.可选地,所述基于自适应动态规划算法的横向子系统控制的步骤包括:
82.解决横向子系统的最优控制问题;
83.时变hjb方程求解;
84.基于自适应动态规划的控制设计;
85.稳定性证明;
86.实验仿真。
87.可选地,所述解决横向子系统的最优控制问题的步骤,包括:基于横向子系统动力学模型,将水平方向的图像特征误差和水平方向线速度作为系统状态,滚转角和俯仰角作为控制输入,获得标称的时变状态空间方程;由于四旋翼的机械结构影响和小角度近似原理,欧拉角的变化受到约束,进而将横向子系统控制律求解转换为带输入约束的最优控制问题求解;基于状态量的二次型和控制量的非二次型,定义效用函数,得到性能指标函数;基于性能指标函数,定义时变值函数,提出对应的非线性李雅普诺夫函数;基于最优值函数和最优控制律同时满足非线性李雅普诺夫函数的原理,提出时变hjb方程,通过进行时间微
分,得到用最优值函数表示的最优控制律;将最优控制律的表达式代入时变hjb方程,得到hjb方程新的表达式。
88.针对时变的最优值函数无法直接利用神经网络进行估计的问题,本实施例提出了一种时变神经网络近似方法。
89.可选地,所述时变hjb方程求解的步骤,包括:将状态变量和时间变量组合为一个状态-时间对,作为时变神经网络的输入,基于神经网络的逼近性质,估计时变的最优值函数;分别对近似最优值函数求取关于状态量和时间变量的偏导数,代入到时变hjb方程中,得到估计的时变hjb方程,得到相应的权值误差,以权值误差二次型作为目标函数,基于梯度下降法,求解神经网络的权值更新律,在权值更新律中加入特殊符号函数,以保证状态量的收敛性。
90.可选地,所述稳定性证明的步骤,包括:基于所提出的权值更新律,推导权值误差动力学;通过定义最优值函数、权值误差二次型和特殊符号函数为李雅普诺夫函数,分别对三项正定的李雅普诺夫函数进行时间微分的求解,得到保证李雅普诺夫函数的导数满足负定的条件,证明在满足所推导的条件下系统可以实现最终一致有界,保证横向子系统的稳定性,完成时变自适应动态规划算法的稳定性和收敛性证明。
91.此外,基于所提出的三个子系统控制律,进行了实验仿真,验证了所提出的基于自适应动态规划的四旋翼视觉伺服控制方法的有效性。
92.实施例2
93.在一个实施例中,还提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现上述方法实施例中的步骤。
94.在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述方法实施例中的步骤。
95.本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本发明所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和易失性存储器中的至少一种。非易失性存储器可包括只读存储器(read-only memory,rom)、磁带、软盘、闪存或光存储器等。易失性存储器可包括随机存取存储器(random access memory,ram)或外部高速缓冲存储器。作为说明而非局限,ram可以是多种形式,比如静态随机存取存储器(static random access memory,sram)或动态随机存取存储器(dynamic random access memory,dram)等。
96.当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1