固定翼无人机光电吊舱对定点目标的持续跟踪侦察方法与流程
1.本发明涉及一种固定翼无人机光电吊舱对定点目标的持续跟踪侦察方法,属于光电吊舱目标侦察与跟踪的技术领域。
背景技术:
2.在固定翼无人机上,光电侦察吊舱能够执行全天候、全天时的地面目标侦察与跟踪任务。光电吊舱的伺服跟踪控制一般由位置环、速度环和电流环三环控制组成,当无人机在高空巡航时,由专门的操作人员控制光电吊舱进行扫描与搜索。目前,针对地面定点目标的持续跟踪与侦察,常采用以下两种方式:一种方式为操作人员实时调整摇杆,控制光电吊舱视场中心指向地面目标;另一种方式为在发现目标后手动进入目标视觉伺服跟踪状态,即通过图像处理提取目标的特征,并对目标进行锁定,计算图像视场中心的“十字”与目标之间的像素脱靶量,以此作为伺服控制速度环的输入,进而控制电机转动使相机视轴始终指向地面目标。对于长时间稳定侦察而言,控制摇杆的方式易引起操作人员的疲劳而造成侦察效率降低,且要求人员对吊舱的操作熟练程度较高;目标视觉伺服跟踪的方式,在图像处理提取目标特征时易受到光照、大气能见度等因素的影响,造成地面目标识别的失败,同时,飞机载体随机振动的存在与伺服跟踪控制带宽的不足,容易引起伺服跟踪目标的丢失,这两种方式均会影响光电吊舱对地面定点目标长时间稳定侦察的效果。
技术实现要素:
3.本发明的技术解决问题是:克服现有技术的不足,提供了一种固定翼无人机光电吊舱对定点目标的持续跟踪侦察方法,从固定翼无人机巡航速度、光电吊舱与定点目标相对空间位置等方面入手,考虑若相机视轴始终指向地面定点目标时,计算光电吊舱框架转动所需的目标角速度,以此目标角速度作为伺服速度环的输入进而驱动电机转动,保证视轴始终指向定点目标。
4.本发明的技术解决方案是:
5.一种固定翼无人机光电吊舱对定点目标的持续跟踪侦察方法,包括以下步骤:
6.光电吊舱设备上电自检,基座电子舱内的惯性导航组合上电进行初始化对准;
7.光电吊舱对所侦查的地面定点目标进行定位,计算地面定点目标的经纬度坐标信息;
8.通过地面目标与光电吊舱自身的经纬度坐标,惯性导航组合的东北天速度,计算光电吊舱俯仰框架与方位框架转动的目标角速度,进而驱动电机使视轴始终指向地面定点目标。
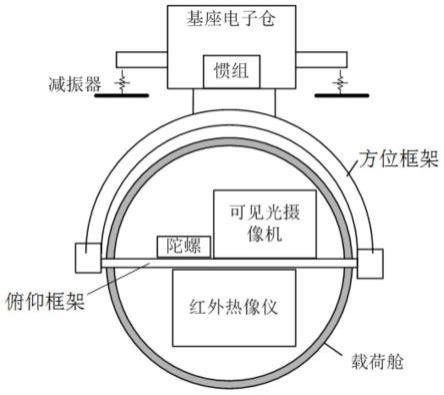
9.进一步的,所述光电吊舱包括基座电子舱、载荷舱、减振器、方位框架、俯仰框架、惯性导航组合、可见光相机、陀螺仪和红外热像仪;
10.球形的载荷舱通过方位框架安装在基座电子舱下方,基座电子舱通过减振器安装在固定翼无人机下方;惯性导航组合设置在基座电子舱内部,可见光相机、陀螺仪和红外热
像仪设置在载荷舱内的俯仰框架上;
11.俯仰框架用于可见光相机、陀螺仪和红外热像仪沿俯仰轴旋转,方位框架用于载荷舱沿方位轴旋转。
12.进一步的,所述光电吊舱设备上电自检,基座电子舱内的惯性导航组合上电进行初始化对准,包括:
13.(1.1)固定翼无人机在起飞前,光电吊舱上电进行自检初始化,俯仰轴和方位轴按照预设指令旋转,最终停至各自的零位;
14.(1.2)惯性导航组合根据装订的初始经纬度坐标完成初始化对准,记录此时gps输出的海拔高度h0。
15.进一步的,所述光电吊舱对所侦查的地面定点目标进行定位,计算地面定点目标的经纬度坐标信息,包括:
16.(2.1)根据gps输出的海拔高度h0判断固定翼无人机的高度是否已经达到设定值,当达到设定值后,通过地面站操作台摇杆,将视场中心对准地面定点目标,按照预设指令进入目标定位状态;
17.(2.2)建立以基座电子舱为原点的柱面坐标系和笛卡尔坐标系,其中,柱面坐标系中表示为:方位框架角α、俯仰框架角β、飞机相对地面高度h;
18.将地面定点目标由以基座电子舱为参考的柱面坐标系的坐标(α
bt
,β
bt
,h
bt
)转换为笛卡尔坐标系的坐标(x
ct
,y
ct
,z
ct
)表示,如下式所示:
[0019][0020][0021]zct
=h
[0022]
采用惯组姿态角构成的欧拉旋转矩阵r
xyz
,将此笛卡尔坐标(x
ct
,y
ct
,z
ct
)进行变换,转化为在惯性空间以光电吊舱为原点的坐标系下,地面定点目标坐标表示为(x
et
,y
et
,z
et
);结合光电吊舱惯性导航组合在目标定位时刻输出的经度、纬度、高程值(n0,w0,h0),按照下式计算地面定点目标的经度、纬度、高程坐标(n
tar
,w
tar
,h
tar
),具体为:
[0023][0024][0025]htar
=h0+z
et
[0026]
式中,re为地球半径。
[0027]
进一步的,所述通过地面目标与光电吊舱自身的经纬度坐标,惯性导航组合的东北天速度,计算光电吊舱俯仰框架与方位框架转动的目标角速度,包括:
[0028]
建立以光电吊舱为原点的东北天坐标系,基于惯性导航组合实时更新的经度、纬度、高程坐标(n
base
,w
base
,h
base
)与地面定点目标的经度、纬度、高程坐标(n
tar
,w
tar
,h
tar
),计算出地面定点目标在此东北天坐标系下数值(x
t
,y
t
,z
t
),结合惯性导航组合的导航数据东
速v
x
、北速vy和天速vz,计算吊舱俯仰框架目标角速度方位框架目标角速度
[0029]
进一步的,吊舱俯仰框架目标角速度方位框架目标角速度按照如下公式计算得到:
[0030][0031][0032]
进一步的,本发明还提出一种固定翼无人机光电吊舱对定点目标的持续跟踪侦察系统,包括:
[0033]
初始化模块:光电吊舱设备上电自检,基座电子舱内的惯性导航组合上电进行初始化对准;
[0034]
目标经纬度计算模块:光电吊舱对所侦查的地面定点目标进行定位,计算地面定点目标的经纬度坐标信息;
[0035]
目标角速度计算模块:通过地面目标与光电吊舱自身的经纬度坐标,惯性导航组合的东北天速度,计算光电吊舱俯仰框架与方位框架转动的目标角速度,进而驱动电机使视轴始终指向地面定点目标。
[0036]
本发明与现有技术相比的有益效果是:
[0037]
(1)本发明中,操作人员仅需控制吊舱视轴指向地面定点目标,按照上述步骤吊舱自动完成目标定位及框架转速计算后,即可对地面定点目标进行长时间稳定跟踪侦察,操作流程简洁快速,达到了更好的侦察效果。
[0038]
(2)本发明方法不涉及相机载荷与图像处理软件,算法简单易行;且框架转速控制的速度环比视觉伺服跟踪的位置环响应带宽高,在机载振动条件下具有更高的跟踪侦察稳定性和可靠性。
[0039]
(3)本发明采用框架转速控制的速度环与现有技术的视觉伺服跟踪的位置环相比,不受光线、大气能见度、遮挡物、极端天气等等因素的影响,是更加稳定可靠的对定点目标的持续跟踪侦察方法。
附图说明
[0040]
图1为吊舱惯组安装位置示意图;
[0041]
图2为固定翼无人机光电吊舱与地面定点目标空间相对位置示意图;
[0042]
图3为本发明方法的流程图。
具体实施方式
[0043]
下面结合附图对本发明的具体实施方式进行进一步的详细描述。
[0044]
光电吊舱对定点目标长时间稳定跟踪侦察时,为克服现有控制摇杆方式的侦察效率低,且视觉伺服跟踪中光照、大气能见度对相机硬件与图像软件算法要求较高的不足之
处,本发明通过提供一种固定翼无人机光电吊舱对定点目标的持续跟踪侦察方法,该方法从固定翼无人机巡航速度、光电吊舱与定点目标相对空间位置等方面入手,考虑若相机视轴始终指向地面定点目标时,计算光电吊舱框架转动所需的目标角速度,以此目标角速度作为伺服速度环的输入进而驱动电机转动,保证视轴始终指向定点目标。因此,可避免由于人员操作疲劳、图像处理失效、遮挡物等因素带来的不利影响。
[0045]
本发明实施的光电吊舱在其基座内安装有惯组设备,如图1所示。
[0046]
光电吊舱包括基座电子舱、载荷舱、减振器、方位框架、俯仰框架、惯性导航组合、可见光相机、陀螺仪和红外热像仪;
[0047]
球形的载荷舱通过方位框架安装在基座电子舱下方,基座电子舱通过减振器安装在固定翼无人机下方;惯性导航组合设置在基座电子舱内部,可见光相机、陀螺仪和红外热像仪设置在载荷舱内的俯仰框架上;
[0048]
俯仰框架用于可见光相机、陀螺仪和红外热像仪沿俯仰轴旋转,方位框架用于载荷舱沿方位轴旋转。
[0049]
光电吊舱对定点目标的持续跟踪侦察方法,包括以下步骤:
[0050]
步骤1、定翼无人机在起飞前,光电吊舱上电初始化。
[0051]
(1.1)俯仰轴从当前位置旋转至俯仰上限位,而后反向旋转至俯仰下限位,最终按照预设指令旋转至水平零位;方位轴旋转一周后按照预设指令旋转至机头方向零位。
[0052]
(1.2)吊舱基座安装的惯导根据装订的初始经纬度坐标完成初始化对准,记录此时gps输出的海拔高度h0。
[0053]
步骤2、针对所侦察的定点目标,吊舱对地面目标进行定位,计算目标经纬度信息;
[0054]
(2.1)根据gps输出的海拔高度h0判断固定翼无人机的高度是否已经达到设定值,当达到设定值后,通过地面站操作台摇杆,将视频视场中心“十字”对准地面定点目标,按照预设指令进入目标定位状态。
[0055]
(2.2)建立以吊舱基座(基座电子舱)为原点的柱面坐标系(b系)和笛卡尔坐标系(c系),其中,地面目标在此柱面坐标系中表示为:方位框架角α,俯仰框架角β,飞机相对地面高度h。将地面目标由以基座为参考的柱面坐标系(α
bt
,β
bt
,h
bt
)转换为笛卡尔坐标系(x
ct
,y
ct
,z
ct
)表示,如下式所示。
[0056][0057][0058]zct
=h
[0059]
吊舱基座惯组的横滚角为γ,俯仰姿态角为θ,方位姿态角为ψ,欧拉旋转矩阵rxyz表示如下:
[0060]
[0061]
而后,将此笛卡尔坐标(x
ct
,y
ct
,z
ct
)通过欧拉旋转矩阵r
xyz
进行变换,转为在惯性空间笛卡尔坐标系下,以吊舱为原点的地面目标坐标(x
et
,y
et
,z
et
),转换关系如下式所示。
[0062][0063]
结合光电吊舱基座惯导在“目标定位时刻”输出的经度、纬度、高程(n0,w0,h0)值,按照下式计算地面目标的经度、纬度、高程坐标(n
tar
,w
tar
,h
tar
)为:
[0064][0065][0066]htar
=h0+z
et
[0067]
式中,re为地球半径。
[0068]
步骤3、通过定位地面目标位置与吊舱自身的经纬度坐标,根据惯导的东北天速度,计算吊舱俯仰与方位框架的目标角速度,用于补偿无人机巡航相对于地面定点目标位置变化导致的吊舱视轴偏移。
[0069]
建立以吊舱为原点的东北天坐标系,基于基座惯导实时更新的经度、纬度、高程坐标(n
base
,w
base
,h
base
)与地面定点目标的经度、纬度、高程坐标(n
tar
,w
tar
,h
tar
),可计算出地面定点目标在此东北天坐标系下数值(x
t
,y
t
,z
t
),在此东北天坐标系下目标的柱面坐标(α
et
,β
et
,h
et
)可表示为:
[0070][0071][0072]het
=z
t
[0073]
结合基座惯组的导航数据东速v
x
,北速vy和天速vz,对吊舱俯仰框架目标角度和方位框架目标角度求导,即得到俯仰和方位框架角速度为:
[0074]
[0075][0076]
以此计算得到的吊舱俯仰和方位角速度,作为伺服控制速度环的输入目标值,进而驱动电机转动使吊舱视轴始终指向地面定点目标。
[0077]
基于上述方法,本发明还提出一种固定翼无人机光电吊舱对定点目标的持续跟踪侦察系统,包括:
[0078]
初始化模块:光电吊舱设备上电自检,基座电子舱内的惯性导航组合上电进行初始化对准;
[0079]
目标经纬度计算模块:光电吊舱对所侦查的地面定点目标进行定位,计算地面定点目标的经纬度坐标信息;
[0080]
目标角速度计算模块:通过地面目标与光电吊舱自身的经纬度坐标,惯性导航组合的东北天速度,计算光电吊舱俯仰框架与方位框架转动的目标角速度,进而驱动电机使视轴始终指向地面定点目标。
[0081]
在固定翼无人机搭载光电吊舱高空巡航时,本发明实现了地面定点目标始终处于可见光视场图像之中,达到了对目标更好的侦察效果。在吊舱视轴长时间稳定指向目标的同时,能够直接减轻人员对光电吊舱的操作频度,提升目标的侦察效率。
[0082]
实施例:
[0083]
某飞机在t时刻的经度:110.2725102,纬度:41.6316426,对地飞行高度1000米;飞机俯仰姿态角:1.2
°
,横滚角0.5
°
,航向角175
°
,飞机的东速为0.5m/s、北速-35m/s、天速0m/s。
[0084]
若此时光电吊舱俯仰框架角为-20
°
,方位框架角160
°
的地面目标进行定点目标进行侦察,在t+1时刻,飞机经度:110.2725112,纬度:41.6315789,对地飞行高度1000米;
[0085]
按照本发明的计算步骤,得出此时应实施的俯仰框架转速为:-0.21
°
/s,方位框架转速为:-0.32
°
/s,即可满足对地面定点目标的持续跟踪侦察。
[0086]
计算出的俯仰和方位框架的目标角速度作为电机控制速率环的目标值,相对比于图像识别伺服跟踪的方式,算法简单易行,不受天气与光照的影响,在机载振动条件下具有更高的跟踪侦察稳定性和可靠性。
[0087]
本发明未详细说明部分属本领域技术人员公知常识。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1