一种多无人机编队穿越框形障碍物方法
1.本发明涉及无人机技术领域,具体涉及一种多无人机编队穿越框形障碍物方法,可应用于救援,消防,探测等需要无人机协同合作进行穿越等场景。
背景技术:
2.近十年来,无人机在民用、工业和军事领域得到了广泛的应用。多无人机间的协同合作执行如穿越、救援、补给等任务一直是研究的热点,多个无人机组成无人机集群,通过空中组网实现无人机之间信息的交流和共享,再结合飞行控制、智能学习等技术实现无人机集群协同执行任务,充分发挥单个无人机的优势,从而满足复杂多样的任务需求。相比于单个无人机来说,多无人机集群在执行任务时有更高的鲁棒性,冗余性和扩展性,同时任务的执行会更加高效,无人机的生存能力也会更强,当集群中有节点故障或被攻击下线时,该节点所承担的任务可以由其他节点来代替,能确保任务能够被完成。
3.在其中,多无人机间的编队穿越障碍物是研究的重点。为了实现多无人机系统的协同运行,每个人无人机需要获得相邻无人机间的相对位置,通常这是通过外部定位系统如gps,gnss等全球定位系统得到;而在实现无人机的穿越任务时,通常无人机会携带一个视觉里程计进行识别计算框型障碍物的中心。然而,在无人机需要在未知环境下执行穿越任务时,更多情况下是gps,gnss等全球定位系统信号薄弱的场景,同时在一些光线昏暗,可见度低,遮挡等场景下,视觉里程计很难发挥作用。
4.在多无人机编队协同穿越框型障碍物场景下,现有的技术中,想实现我们编队穿越的效果有如下方案,
5.在有全球定位系统下,在无人机和障碍物上安装gps等定位模块,可获得无人机和障碍物的位置,之后通过位置控制进行编队穿越。或者在建立uwb基站的室内定位下,也可获得无人机和障碍物的位置。
6.在有单目,双目或者红外-摄像头(rgbd)等条件下,通过slam算法进行地图的构建和定位,同时根据障碍物的特征点进行识别。而无人机之间的编队可通过蓝牙或者wifi等传输协议进行位置共享。这种方法需要的硬件要求更高,同时计算量也更复杂。
7.在全球定位系统下,在无人机上安装gps等定位模块,同时安装单目,双目等摄像头用来识别障碍物,从而做到编队穿越。
8.无不例外,以上各种都需要至少一种全球定位系统或者摄像头才能做到编队穿越的效果,而上述的方案,在未知环境下全球定位系统受限和光线昏暗等摄像头受限情况下,很难实现编队穿越的效果。
技术实现要素:
9.本发明的目的是提供一种多无人机编队穿越框形障碍物方法,用以实现仅依靠无人机自身的机载传感器外加uwb获得的距离传感器来实现编队穿越的目的,适应性强且对光线、gps不存在依赖。
10.为了实现上述任务,本发明采用以下技术方案:
11.一种多无人机编队穿越框形障碍物方法,包括:
12.无人机编队在飞行过程中,实时获取框形障碍物与无人机编队间的距离信息,以及无人机编队的位移信息;
13.构建框形障碍物和无人机编队的相对位置模型;
14.构建无人机速度控制模型;
15.基于无人机编队的距离信息和位移信息、框形障碍物和无人机编队的相对位置模型,构建参数模型;
16.根据所述参数模型构建对框形障碍物的位置估计模型以及无人机编队间的相对位置估计模型;
17.根据构建的对框形障碍物的位置估计模型和无人机编队间的相对位置估计模型,结合所述的无人机速度控制模型,设计无人机编队穿越障碍物的控制器,利用控制器对无人机编队的飞行进行速度控制,从而使无人机编队穿越框形障碍物。
18.进一步地,所述构建框形障碍物和无人机编队的相对位置模型,其数学公式如下:
[0019][0020]
其中p0(k)、pj(k)分别表示主无人机、无人机j在k时刻全局坐标系中的位置,ps表示框型障碍物在全局坐标系中的位置,q0(k)、q
j0
(k)表示主无人机与框形障碍物的相对位置,q
j0
(k)表示无人机j与主无人机的相对位置。
[0021]
进一步地,所述构建无人机速度控制模型,包括:
[0022]
将无人机建模为速度有界的离散时间积分器,数学公式如下
[0023][0024]
其中t为采样周期,和为主无人机、无人机j的速度限制,v0和vj为主无人机、无人机j的最大速度,满足vj>v0。
[0025]
进一步地,所述基于无人机编队的距离信息和位移信息、框形障碍物和无人机编队的相对位置模型,构建参数模型,包括:
[0026]
将无人机的实时获取的距离信息、位移信息用无人机编队的相对位置表示:
[0027]
d0(k)=||q0(k)||,d
j0
(k)=||q
j0
(k)||
ꢀꢀ
(1.3)
[0028][0029]
之后构建参数模型,根据式(1.3)和(1.4):
[0030][0031]
在上式中,p0(0)表示主无人机在初始时刻的位置,∈s(k)是构建的与框形障碍物位置ps(k)有关的参数模型,∈
j0
(k)是构建的与无人机j与主无人机的相对位置q
j0
(k)有关的参数模型,上标t表示转置。
[0032]
进一步地,所述构建对框形障碍物的位置估计模型,具体为:
[0033][0034]
其中i是单位矩阵,r0(k)是协方差矩阵,是k时刻对框形障碍物位置ps(k)的估计值,φ0(k)是的集合矩阵,满足δ1是集合矩阵的最小特征值,n表示本方法的维度;λ为遗忘因子,μ为阻尼项,m(k)是关于λ的遗忘算子矩阵,满足:
[0035][0036]
进一步地,所述无人机编队间的相对位置估计模型表示如下:
[0037][0038]
其中φ
j0
(k)是的集合矩阵,r
j0
(k)是协方差矩阵,是无人机j与主无人机的相对估计位置。
[0039]
进一步地,所述无人机编队穿越障碍物的控制器设计如下:
[0040][0041]
其中是k时刻对框形障碍物位置ps(k)的估计值,v0(k)和vj(k)是利用所述事件触发编队穿越控制器所得到的主无人机、无人机j的速度值,和是对v0(k)和vj(k)进行了限速,使得最后的输出速度小于预设的最大速度v0和vj,a0和aj是设计的控制器系数,是持续激励信号;
[0042]
h0(k)和h
j0
(k)表示切换函数,为分段常数函数,表示无人机编队队形和穿越之间的切换信号。
[0043]
进一步地,h0(k)和h
j0
(k)的具体表达式如下:
[0044][0045]
其中k1为初始时间,k4为运行时间,为运行时间,为运行时间,表示k时刻对主无人机位置的估计值,sup表示上确界,和是人为设置的事件触发器的起始点和结束点;rot是框型障碍物相对坐标系的旋转矩阵;在二维情况下,其旋转矩阵为w是障碍物相对于的无人机坐标系的角度;α是穿越过程中的穿越步长;为穿越障碍物前后无人机编队的队形,为穿越过程中无人机编队的队形。
[0046]
一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,处理器执行计算机程序时实现所述多无人机编队穿越框形障碍物方法的步骤。
[0047]
一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现所述多无人机编队穿越框形障碍物方法的步骤。
[0048]
与现有技术相比,本发明具有以下技术特点:
[0049]
1.本发明不依靠于全球定位系统得到准确的全局位置信息,也不依靠摄像头得到的视觉信息;本发明利用uwb传感器和imu传感器获得的距离和位移数据完成了多无人机的编队穿越框形障碍物实验,由于uwb和imu强大的抗干扰能力,长距离,同时环境对其基本无
影响,因此可以适用于很多特殊场景,并且可以保证在一定情况下实现多无人机利用uwb与imu实现精确的定位,以及精确的计算每个无人机之间的相对距离,进一步保证了在特殊环境下,尤其是gps受限情况下的无人机编队覆盖搜索。
[0050]
2.本发明的计算复杂度是非常低,因此对比于现有技术slam的定位和导航来说,计算量相对较少,可以快速的处理我们所需要的数据,达到高精准的要求,而且所需要的硬件环境需求更低,因此,本发明有更低的计算量和更低的硬件配置,这可以极大的减少成本预算。
[0051]
3.本发明创新地将相对定同编队和穿越障碍物联系在一起,将两方面的应用进行了融合,对这方面的应用提出了新的解决方案。
附图说明
[0052]
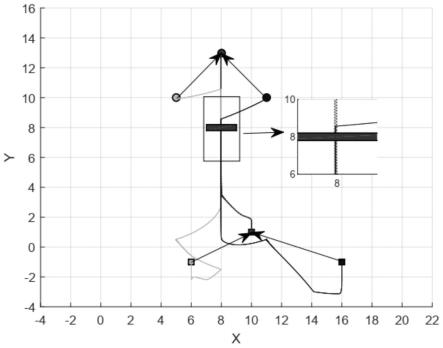
图1为本发明方法在matlab的仿真效果二维视图;
[0053]
图2为本发明方法在matlab的仿真效果三维视图;
[0054]
图3至图5为本发明方法在gazebo仿真时不同位置的效果示意图。
具体实施方式
[0055]
针对现有技术中编队需要全球定位系统获取全局绝对位置,多机之间需要相对定位,数据量大,处理速度慢,并且穿越障碍物需要良好的光线环境的局限性,本发明提出一种多无人机编队穿越框型障碍物方法,优势在于在编队中不需要通过全球定位系统进行编队,而在穿越障碍物中对环境的适用性更强。
[0056]
本发明的一种多无人机编队穿越框形障碍物方法,包括以下步骤:
[0057]
步骤1,无人机编队在飞行过程中,实时获取框形障碍物与无人机编队间的距离信息,以及无人机编队的位移信息。
[0058]
获取框形障碍物与无人机编队间的距离信息d0、无人机编队间的距离信息d
j0
;其中d
j0
代表无人机j与编号0的主无人机的距离。
[0059]
同时无人机实时获取自身的速度信息并进行积分处理,得到位移信息同时无人机实时获取自身的速度信息并进行积分处理,得到位移信息其中代表编队中的主无人机(领导者)的位移,代表编队中无人机j(跟随者)的位移,j表示无人机的编号。
[0060]
步骤2,构建框形障碍物和无人机编队的相对位置模型,其数学公式如下:
[0061][0062]
其中p0(k)、pj(k)分别表示主无人机、无人机j在k时刻全局坐标系中的位置,ps表示框型障碍物在全局坐标系中的位置,q0(k)、q
j0
(k)表示主无人机与框形障碍物的相对位置,q
j0
(k)表示无人机j与主无人机的相对位置。
[0063]
步骤3,构建无人机速度控制模型,其数学公式如下:
[0064]
将无人机建模为速度有界的离散时间积分器,数学公式如下
[0065]
[0066]
其中t为采样周期,和为主无人机、无人机j的速度限制,v0和vj为主无人机、无人机j的最大速度,满足vj>v0;参数后的(k)、(k+1)表示k、k+1时刻该参数的值,下同,不再赘述。
[0067]
步骤4,基于步骤1获取的无人机编队的距离信息和位移信息,结合步骤2框形障碍物和无人机编队的相对位置模型构建参数模型,具体如下:
[0068]
根据式(1.1)将无人机的实时获取的距离信息、位移信息用无人机编队的相对位置表示:
[0069]
d0(k)=||q0(k)||,d
j0
(k)=||q
j0
(k)||
ꢀꢀ
(1.3)
[0070][0071]
之后构建参数模型,根据式(1.3)和(1.4):
[0072][0073]
在上式(1.5)中,p0(0)表示主无人机在初始时刻的位置,∈s(k)是构建的与框形障碍物位置ps(k)有关的参数模型,∈
j0
(k)是构建的与无人机j与主无人机的相对位置q
j0
(k)有关的参数模型,上标t表示转置。
[0074]
步骤5,根据步骤4的参数模型构建对框形障碍物的位置估计模型以及无人机编队间的相对位置估计模型,具体推导如下:
[0075]
步骤5.1,构建对框形障碍物的位置估计模型
[0076]
根据式(1.5),本方案中增加了一个遗忘因子λ,以防止新数据被旧数据淹没。此外,本方案设计了一个阻尼项μ来增加算法的稳定性,以防止识别产生突发现象。
[0077][0078]
其中i是单位矩阵,r0(k)是协方差矩阵,是k时刻对框形障碍物位置ps(k)的
估计值,本方案中,参数上标λ表示该参数的估计值,下同;φ0(k)是的集合矩阵,满足δ1是集合矩阵的最小特征值,n表示本方法的维度,如果是二维情况下的位置估计,则n为2;如果是三维情况下的位置估计,则n为3。m(k)是关于λ的遗忘算子矩阵,满足因此,当通过(1.6)主无人机可以准确的估计框形障碍物的位置。
[0079]
步骤5.2,构建无人机编队间的相对位置估计模型,推导如下:
[0080]
对于编号为j的无人机,我们设计了如下相对位置估计器:
[0081][0082]
其中φ
j0
(k)是的集合矩阵,r
j0
(k)是协方差矩阵,是无人机j与主无人机的相对估计位置。当0<λ≤1通过(1.7)编号为j的无人机可以准确的估计与主无人机的相对位置。
[0083]
步骤6,根据步骤5构建的对框形障碍物的位置估计模型(1.6)和无人机编队间的相对位置估计模型(1.7),结合步骤3的无人机速度控制模型,设计无人机编队穿越障碍物的控制器,利用控制器对无人机编队的飞行进行速度控制,从而使无人机编队穿越框形障碍物。
[0084]
无人机编队穿越障碍物的控制器的具体设计过程如下:
[0085]
根据式子(1.6)(1.7)以及无人机速度控制模型(1.2),设计了事件触发编队穿越控制器,设计如下:
[0086][0087]
其中是k时刻对框形障碍物位置ps(k)的估计值,v0(k)和vj(k)是利用所述事件触发编队穿越控制器所得到的主无人机、无人机j的速度值,和是对v0(k)和vj(k)进行了限速,使得最后的输出速度小于预设的最大速度v0和vj,是针对式(1.2)的无人机
控制模型进行设计,a0和aj是设计的控制器系数,其具体范围由式1.10给出,是持续激励信号,目的是为了避免奇异解。
[0088]
h0(k)和h
j0
(k)表示切换函数,为分段常数函数,表示无人机编队队形和穿越之间的切换信号。详情如下:
[0089][0090]
其中k1为初始时间,k4为运行时间,为运行时间,为运行时间,表示k时刻对主无人机位置的估计值,sup表示上确界,和是人为设置的事件触发器的起始点和结束点,分别表示主无人机与框型障碍物的相对位置达到是会开始进行编队穿越,达到是会结束编队穿越。rot是框型障碍物相对坐标系的旋转矩阵。在二维情况下,其旋转矩阵为w是障碍物相对于的无人机坐标系的角度,这个可通过人为设置,也可通过附着在uwb传感器的里程计测出角度;α是穿越过程中的穿越步长。为穿越障碍物前后无人机编队的队形,为穿越过程中无人机编队的队形。
[0091]
补充,当无人机编队穿越障碍物的控制器(1.8),(1.9)满足如下条件时,控制器的编队穿越误差是指数收敛的。
[0092][0093]
其中,t表示采样时间,其中,t表示采样时间,
[0094]
本发明方法在实际应用时,首先利用步骤1采集得到的距离信息d0,d
j0
,和位移信息信息,代入到步骤4参数模型中进行求解,得到∈s(k),∈
j0
(k),之后分别代入步骤5障碍物的位置估计模型和无人机编队间的相对位置估计模型,得到进一步,将代入步骤6无人机编队穿越障碍物的控制器,控制无人机编队按照所预设的式(1.9)进行飞行,同时利用式(1.8)便可解算出无人机每个时刻的矢量速度,通过速度控制以使其穿越框形障碍物,如此便可以解决全球定位系统环境受限下的编队问题和光线受限环境下的穿越问题。
[0095]
仿真实验
[0096]
本发明方法在matlab的仿真效果如图1和图2所示,其中算法所需要的距离和位移
信息通过坐标的数学运算得到,补充说明,距离相当于两个坐标差的二范数值,位移为两个坐标的差值;在算法的数值验算上并未使用全局坐标数值。
[0097]
进一步,将本发明方法代入gazebo软件上进行验算,依靠gazebo强大的无人机动力学模型,目的是为了算法所设计的数学模型可以适用于真实的无人机模型中。在gazebo仿真的效果如图3至图5所示。
[0098]
可以看到,多无人机按照所设想的一样,在穿越前保持一定队形,之后改变队形以满足框形障碍物的穿越要求,在之后恢复原先的编队队形,验证了本方法对实际无人机模型的合理性。
[0099]
以上实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1