一种基于模型预测控制的四旋翼自主降落方法
本发明涉及一种基于模型预测控制的四旋翼自主降落方法,属于飞行器控制。
背景技术:
1、为解决四旋翼飞行器的续航能力约束,在实际应用中常利用车辆或者船舶作为起降平台拓宽四旋翼的使用范围和应用场景,这要求飞行器具备自主降落的能力,尤其是让四旋翼飞行器自主降落在平台移动的能力。
2、现有的飞行器自主降落方法具有反步法、动态控制面法和模型预测控制法。
3、其中反步法和动态控制面发能够实现无人机的精确降落,但是该阶段前期存在绕飞跟踪,造成飞行器不必要的能量和时间消耗;模型预测控制法通过设置固定采样时间规划轨迹,综合考虑各种软硬约束,同时能够实现有限时域滚动优化,广泛应用于解决四旋翼飞行器的路径规划和跟踪问题。
4、但是模型预测控制法计算量大,同时需要配合视觉检测,导致其对机载计算机的限制大。
5、此外,模型预测控制法中固定采样时间,使其无法规划变化的目标函数,导致其无法很好满足降落过程中不同阶段的性能要求,例如降落前期飞行器检测目标速度较慢、降落阶段无法应对环境干扰,导致降落平稳性波动较大。
6、因此,有必要对基于模型预测控制的四旋翼自主降落进一步地研究,以提高飞行器的降落稳定性。
技术实现思路
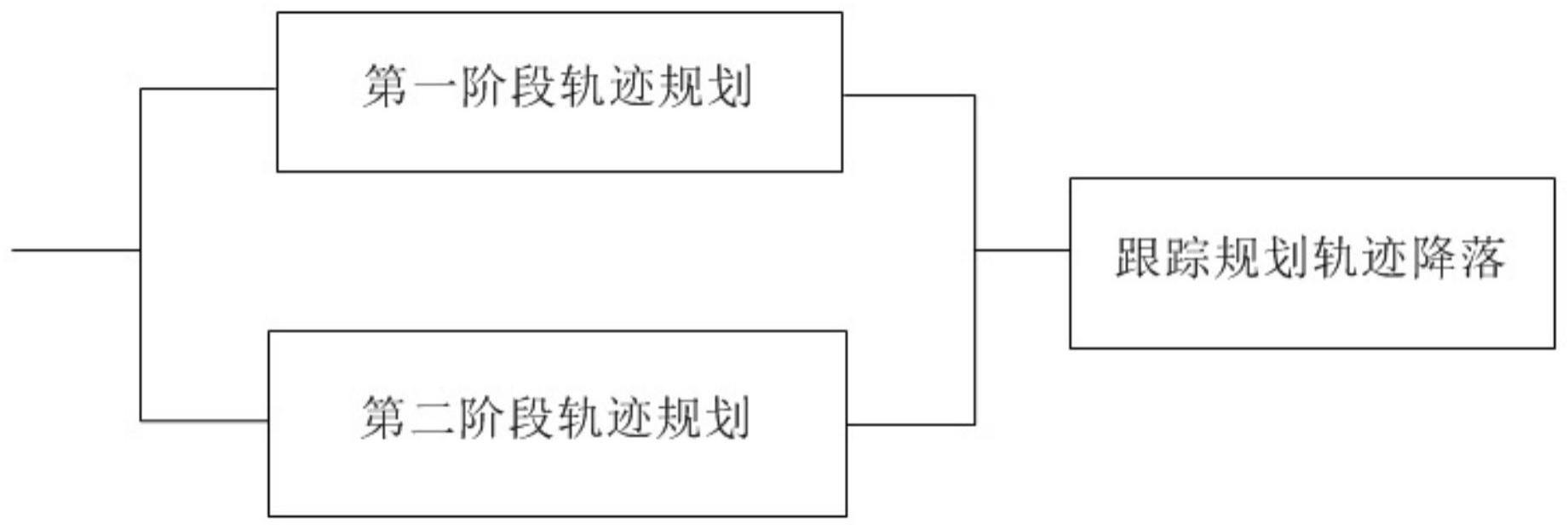
1、为了克服上述问题,本发明人进行了深入研究,提出了一种基于模型预测控制的四旋翼自主降落方法,将四旋翼飞行器降落过程分为第一阶段和第二阶段,第一阶段飞行器与降落平台的距离远于第二阶段,
2、第一阶段和第二阶段均采用模型预测控制法规划飞行器的轨迹,第一阶段和第二阶段中模型预测控制法中的目标函数不同。
3、在一个优选的实施方式中,在第一阶段和第二阶段的模型预测控制法中,模型的动力学方程表示为:
4、
5、
6、其中,k表示不同的时刻,x(k)为状态矢量,表示飞行器在k时刻的状态量,y(k)为输出矢量,表示k时刻飞行器在控制量作用下的输出状态;ad表示离散化后的系统矩阵,bd表示离散化后的输入矩阵,ts为采样周期;a表示状态空间的系统矩阵,b表示状态空间的控制矩阵,c表示状态空间的输出矩阵,s表示离散过程中的复变量,u(k)表示k时刻的控制量。
7、在一个优选的实施方式中,第一阶段中,模型预测控制法的目标函数为:
8、
9、xa(i)=pr(i)
10、其中,i表示不同的时刻,n为预测时域,xa(i)表示i时刻飞行器和降落平台的相对位置上标t表示转置,pr为飞行器距离降落平台的相对位置,ta为飞行器降落所需时间的估计,矩阵和为权重矩阵,表示实数集。
11、在一个优选的实施方式中,第一阶段,飞行器降落所需时间的估计ta为:
12、
13、其中,‖pr‖为四旋翼飞行器和降落平台的相对距离,vr为四旋翼飞行器和降落平台的相对速度,er表示四旋翼飞行器和降落平台的连线方向。
14、在一个优选的实施方式中,第二阶段中,模型预测控制法的目标函数为:
15、
16、其中,i表示不同的时刻,n为预测时域,xl(i)=[pr(i),vr(i)]t,pr(i)为i时刻飞行器距离降落平台的相对位置,vr为四旋翼飞行器和降落平台的相对速度;u(i)=[jx(i),jy(i),jz(i)]t为四旋翼飞行器的加加速度,即飞行器的控制量;
17、al=[ax,ay]t为飞行器在水平面内的加速度,权重矩阵和都为常值矩阵。
18、在一个优选的实施方式中,在模型预测控制法中,当对降落平台的位置和速度信息进行估计和更新时,重新对整个轨迹进行规划,每次规划都求解如下优化问题:
19、
20、s.t.x(k+1)=adx(k)+bdu(k)
21、x(0)=x0,x(n)=xf,z(k+1)>hp
22、|ad(k+1)|≤ad,max,|ud(k)|≤ud,max,c=x,y,z
23、k=0,1,…,n-1
24、其中,hp为降落平台的高度,z表示飞行器的高度位置,x0表示初始时刻的飞行器高度,ad,max表示飞行器的加速度上限,ud,max表示飞行器的加加速度上限,d=x,y,z表示不同的方向。
25、在一个优选的实施方式中,在第一阶段和第二阶段的模型预测控制法中,预测时域为固定值,采样时间为变化值,
26、采样时间ts表示为:
27、
28、其中,ta为飞行器降落所需时间的估计,n为预测时域,α为常数系数。
29、在一个优选的实施方式中,采用串级增量动态逆法控制飞行器跟踪规划轨迹飞行,在串级增量动态逆法中,
30、设置外环的控制器为:
31、
32、其中,ut为外环的控制量,uf为控制量ut滤波后的值,为滤波后的加速度,g1为外环的控制矩阵,m表示飞行器质量,t0为当前时刻电机产生的总推力,θ0表示当前时刻的姿态角,vt为外环虚拟控制量;
33、设置内环的控制器为:
34、
35、其中,ur为控制量,表示电机的转速,ωf为滤波后的控制量,g2为外环的控制矩阵,为滤波后的角加速度,vr为内环虚拟控制量,表示电机推力的增量。
36、在一个优选的实施方式中,串级增量动态逆法中,飞行器的动力学方程设置为:
37、
38、
39、g=[0,0,mg]t
40、ω=[p,q,r]t
41、其中,v为飞行器的速度,fc为电机产生的推力,fd为干扰力,iq=diag{ix,iy,iz}为转动惯性矩阵,mc为电机产生的力矩,mr为陀螺力矩,md为干扰力矩,ω为机体坐标系中飞行器的角速度,p表示机体坐标系下的滚转角速度,q表示俯仰角速度,r表示偏航角速度。
42、在一个优选的实施方式中,内环虚拟控制量vr通过对位置偏差进行pd控制获得,表示为:
43、
44、其中,pd为期望位置,从规划轨迹中获得,kp和kd为增益矩阵,p表示当前时刻的位置;
45、内环虚拟控制量vr通过对姿态偏差进行pd控制获得,表示为:
46、
47、其中,θd为期望姿态角,kp′和kd′为增益矩阵,θ表示当前时刻的姿态角。
48、本发明所具有的有益效果包括:
49、(1)根据实际四旋翼降落过程中稳定检测锁定降落平台为节点划分降落阶段,分别设计目标函数,前一阶段侧重时间最优,保证了快速锁定降落平台,后一阶段侧重稳定性,保证了飞行器末端平稳降落,满足降落时的速度和姿态要求;
50、(2)变采样时间保证了前一阶段采样频率低,降低机载计算机的运算压力,便于配合视觉等传感器信息大范围搜索降落平台,后一阶段采样频率高,充分释放计算能力,便于多次规划,修正降落轨迹,保证降落精度;
51、(3)设计的串级增量动态逆控制方法提高了降落系统的抗干扰能力,在外界干扰的影响下四旋翼飞行器仍能稳定跟踪规划的轨迹,实现准确平稳降落。
- 还没有人留言评论。精彩留言会获得点赞!