机器人、行驶策略生成方法、存储介质和程序产品与流程
本技术涉及机器人,特别是涉及一种机器人、行驶策略生成方法、存储介质和程序产品。
背景技术:
1、随着科学技术的发展,各式各样的机器人被越来越多的应用到人们的生产和生活中,节省大量人力的同时给人们的工作和生活带来了极大的便捷。
2、近年来,机器人智能化程度也得到了迅猛的发展。传统技术中,具有移动性能的机器人可根据传感器采集到的感知数据确定当前移动环境中的障碍物,并通过执行行驶策略避开障碍物,实现机器人的正常移动。
3、然而,实际应用中,机器人的行驶环境往往复杂多样,包括多种不同行驶需求的行驶区域,传统机器人所确定的行驶策略与行驶环境的适配性差,致使机器人对行驶环境中的其他事物造成干扰。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种机器人、行驶策略生成方法、装置、存储介质和程序产品。
2、第一方面,本技术提供了一种机器人,包括存储器和处理器,存储器存有计算机可读指令,处理器用于调用并执行计算机可读指令时实现如下步骤:
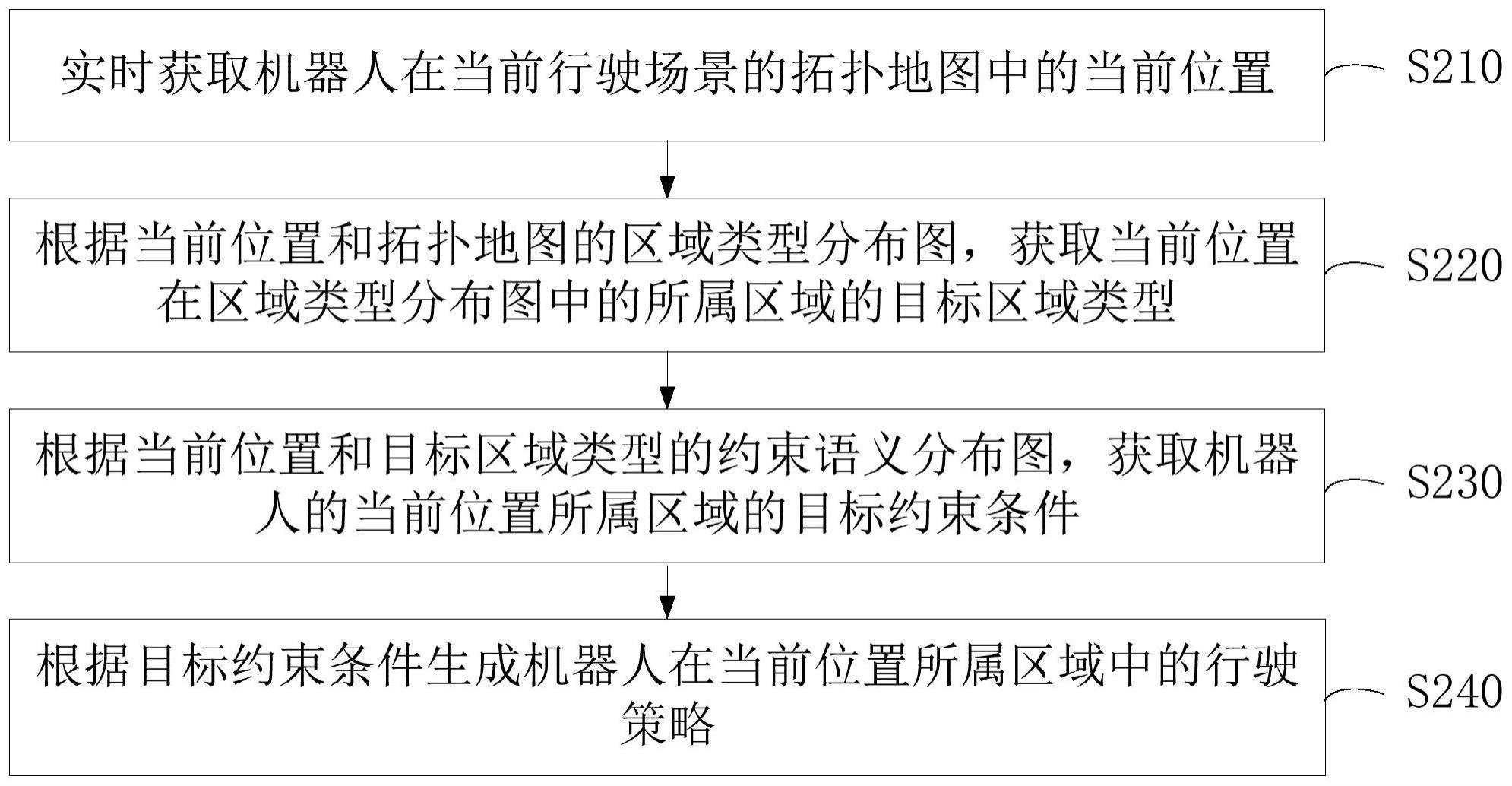
3、实时获取机器人在当前行驶场景的拓扑地图中的当前位置;
4、根据当前位置和拓扑地图的区域类型分布图,获取当前位置在区域类型分布图中的所属区域的目标区域类型;
5、根据当前位置和目标区域类型的约束语义分布图,获取机器人的当前位置所属区域的目标约束条件;
6、根据目标约束条件生成机器人在当前位置所属区域中的行驶策略。
7、在其中一个实施例中,机器人上搭载有定位传感器,实时获取机器人在当前行驶场景的拓扑地图中的当前位置,包括:
8、通过定位传感器实时获取机器人在当前行驶场景下的当前位置坐标;
9、根据当前位置坐标对应的坐标系与当前行驶场景的拓扑地图的地图坐标系之间的转换关系,将当前位置坐标转换至拓扑地图中,得到机器人在拓扑地图中的当前位置。
10、在其中一个实施例中,拓扑地图的区域类型分布图中包括:拓扑地图的各行驶区域中所有像素点的位置坐标和各个像素点所属行驶区域的类型标识,以及类型标识所表征的行驶区域的类型;
11、根据当前位置和拓扑地图的区域类型分布图,获取当前位置在区域类型分布图中的所属区域的目标区域类型,包括:
12、将当前位置分别与拓扑地图的各行驶区域中各个像素点的位置坐标进行匹配;
13、获取各个像素点中位置坐标与当前位置匹配成功的第一候选像素点;
14、确定第一候选像素点所属行驶区域的类型标识,并将类型标识所表征的行驶区域的类型确定为目标区域类型。
15、在其中一个实施例中,目标区域类型的约束语义分布图中包括:目标区域类型所表征的行驶区域中各个像素点的坐标位置和约束标识,以及约束标识所表征的行驶约束条件;
16、根据当前位置和目标区域类型的约束语义分布图,获取机器人的当前位置所属区域的目标约束条件,包括:
17、从预设多种行驶区域的约束语义分布图中,获取与目标区域类型对应的目标约束语义分布图;
18、在目标约束语义分布图中确定位置坐标与当前位置相匹配的第二候选像素点;
19、确定第二候选像素点的约束标识,并将约束标识所表征的行驶约束条件确定为目标约束条件。
20、在其中一个实施例中,实时获取机器人在当前行驶场景的拓扑地图中的当前位置之前,处理器还用于调用并执行计算机可读指令时实现如下步骤:
21、获取与当前行驶场景的拓扑地图尺寸相同的第一参考地图,并根据拓扑地图中各行驶区域的位置坐标确定各行驶区域在第一参考地图中的位置坐标;
22、根据各行驶区域在第一参考地图中的位置坐标确定各行驶区域在第一参考地图中的边缘坐标,并在第一参考地图中将各行驶区域的边缘坐标依次连接形成连通区域,得到处理后的第一参考地图;
23、利用预设的类型标识对处理后的第一参考地图中相应的连通区域中的各个像素点进行标注,得到拓扑地图的区域类型分布图;其中,不同的类型标识表征不同类型的行驶区域。
24、在其中一个实施例中,实时获取机器人在当前行驶场景的拓扑地图中的当前位置之前,处理器还用于调用并执行计算机可读指令时实现如下步骤:
25、获取与当前行驶场景的拓扑地图尺寸相同的多个第二参考地图,并根据拓扑地图中各行驶区域的位置坐标确定各行驶区域在第二参考地图中的位置坐标;其中,每一个第二参考地图对应包括一种类型的行驶区域;
26、在每一个第二参考地图中,以预设的约束标识标注各行驶区域中的各个像素点,得到标注后的多个约束语义分布图;其中,不同的约束标识表征不同的行驶约束条件。
27、在其中一个实施例中,得到拓扑地图的区域类型分布图之前,处理器还用于调用并执行计算机可读指令时实现如下步骤:
28、若拓扑地图的区域类型分布图中不同类型的行驶区域之间存在重叠区域,则获取重叠区域对应的各类行驶区域的类型标识;
29、将重叠区域对应的各类行驶区域的类型标识进行叠加,采用叠加后的类型标对重叠区域中的每个像素点进行标注。
30、第二方面,本技术还提供了一种行驶策略的生成方法,包括上述任一项机器人所实现的步骤。
31、第三方面,本技术还提供了一种行驶策略的生成装置,包括:
32、位置获取模块,用于实时获取机器人在当前行驶场景的拓扑地图中的当前位置;
33、类型获取模块,用于根据当前位置和拓扑地图的区域类型分布图,获取当前位置在区域类型分布图中的所属区域的目标区域类型;
34、约束获取模块,用于根据当前位置和目标区域类型的约束语义分布图,获取机器人的当前位置所属区域的目标约束条件;
35、策略生成模块,用于根据目标约束条件生成机器人在当前位置所属区域中的行驶策略。
36、第四方面,本技术还提供了一种计算机可读存储介质计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述任一项机器人所实现的步骤。
37、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述任一项机器人所实现的步骤。
38、上述机器人、行驶策略生成方法、装置、存储介质和程序产品,通过实时获取自身在当前行驶场景的拓扑地图中的当前位置,并根据当前位置和拓扑地图的区域类型分布图,获取当前位置在区域类型分布图中的所属区域的目标区域类型,进而根据当前位置和目标区域类型的约束语义分布图,获取机器人的当前位置所属区域的目标约束条件,以根据目标约束条件生成机器人在当前位置所属区域中的行驶策略。通过上述方式,即使行驶环境复杂,包括多种不同类型的行驶区域,机器人基于2d的拓扑地图结合更高维度的区域类型信息也可以合理地规划出行驶策略,以满足不同行驶区域的行驶需求,进而提高了行驶策略与行驶环境的适配性,实现了机器人在复杂环境下的稳定行驶,同时降低了机器人对行驶环境其他事物的干扰。
- 还没有人留言评论。精彩留言会获得点赞!