面向土地整治图斑监测的无人机航飞路径优化算法的制作方法
1.本发明属于无人机航线规划技术领域,具体涉及面向土地整治图斑监测的无人机航飞路径优化算法。
背景技术:
2.无人机作为集成了高空拍摄、遥控、遥测技术、视频影像微波传输和计算机信息处理的新型仪器,可以快速获取高分辨率影像,广泛应用于航拍、农业、植保、应急救援、测绘等多个领域。将无人机应用于自然资源监测,可有效弥补卫星监测时空分辨率不足、塔基监测覆盖范围有限、地面巡查监测高度依赖于人工的弊端,可实现“看得快、看得清、看得准”,提高自然资源监测效率。
3.传统的航线规划是呈“s”型路线,其规划过程是由明确航测范围-确认航向以及旁向重叠度-确认航高-规划航线,适用于航测范围内都需观测到的情况。但其面向混合形态的自然资源调查图斑,如:延道路分布的狭长型工矿废弃地土地整治项目图斑、零星状分布的村庄居民点复垦土地整治项目图斑、零星状分布的疑似违法建设用地图斑、大面积覆盖的工业用地出让建设项目图斑等,常出现漏检、冗余、覆盖不全、航迹设置不合理情况。
4.为此,国内外学者针对无人机航迹规划问题开展了大量研究工作,例如采用k-means算法和模拟退火算法对多条件下的多任务多无人机进行航迹规划,增加巡航有效区域中子目标区域的覆盖范围,采用层次定向动态规划解决动态规划在特殊地形环境的适用性和算法复杂性问题,提高计算效率,设计贪心mb-rrt*算法,通过牺牲一定的航迹质量,提高无人机航迹规划问题的速度和节省飞行时间等。
技术实现要素:
5.发明目的:本发明旨在基于无人机硬件参数模拟像片分布并提取航飞点,设计一种顾及贪心机制的遗传算法,高效解算航飞点编码最佳排序,实现无人机航飞路线规划,从而优化解决具有分布零散、形态各异等特征的土地整治图斑影像采集问题,提高监测效率,减少采集时间,节约存储空间。
6.技术方案:本发明的面向土地整治图斑监测的无人机航飞路径优化算法,包括如下步骤:
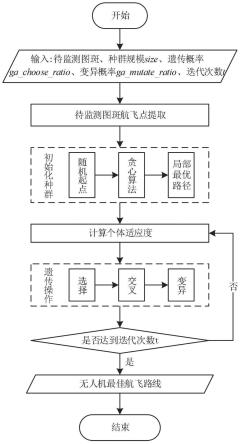
7.步骤1航飞点提取:输入待监测图斑、种群规模size、遗传概率ga_choose_ratio、变异概率ga_mutate_ratio、迭代次数t。设计一种面向混合形态土地整治图斑航飞点提取方法,在图斑监测区域范围内,选取数量最少、位置分布均匀、合理的骨架点,作为无人机飞行的航飞点,记航飞点数目为n。
8.步骤2种群初始化:根据航飞点坐标计算各航飞点之间距离,组成距离矩阵d。对于任一航飞点spi(i=1,2,
…
,n),以spi作为当前航线li的起点,利用贪心机制,生成的所有航线l1,l2,
…
,l
size
的集合,遗传算法的初始种群。
9.步骤3计算种群适应度:对于任一种群个体li(i=1,2,
…
,n),将li的航飞路线距离
的倒数作为其适应度的评价值,记为ai。ai值越大,其适应度越高,反之则适应度越低。
10.步骤4获取父辈种群:将原种群个体按照适应度评价值ai按照从大到小的顺序进行排列,筛选前p_size个个体,作为下一代遗传算法的父辈种群。
11.步骤5遗传操作:基于步骤5获取的父辈种群,经size次随机选择、交叉、变异、遗传的过程,产生size个基因优良的子代个体,进入下一代种群。
12.步骤6迭代并输出结果:重复进行步骤3至步骤5的操作,直至达到预设的遗传迭代次数t,经适应度评价值的计算与比较,获得并输出最佳航飞点序列,即无人机最佳航飞路线。
13.进一步的,所述步骤1中,采用的面向混合形态自然资源监测图斑航飞点提取方法,具体步骤如下:
14.步骤1.1:根据无人机芯片宽度a、焦距f及航高h计算无人机所拍摄一张像片所对应的地面大小b,参见公式(1)。
[0015][0016]
步骤1.2:根据参数b对自然资源监测图斑区域模拟无人机飞行时所拍摄的像片,将像片组成面图层。
[0017]
步骤1.3:用自然资源监测图斑对步骤1.2所得面图层做空间筛选,筛选能完全覆盖且拍摄面积较小的面。
[0018]
步骤1.4:提取步骤1.3所得面的质心点,即为航飞点。
[0019]
进一步的,所述步骤2中,以贪心机制流程如下:先建立两个集合s、v-s,s集合中加入起点和终点,将需要遍历的航飞点存入v-s中,从v-s中选出离起点最近的点将其加入集合s中,并将该点从v-s中移除,不断循环,直至遍历完所有航飞点,得到最后的集合s。
[0020]
进一步的,所述步骤3中,对于任一种群个体li,li的实质是n个航飞点的排列集合s,计算其适应度的评价值fi,参见公式(2)。
[0021][0022]
其中,d为航线li中相邻航飞点之间的距离。
[0023]
进一步的,所述步骤4中,计算父辈种群的个体数量p_zize,参见公式(3)。
[0024]
p_size=n
×
ga_choose_rate
ꢀꢀꢀ
公式(3)
[0025]
进一步的,所述步骤5中,基于步骤4所得的父辈种群,经size次随机选择、交叉、变异过程,获得size个基因优良的子代个体,进入下一代种群。具体操作步骤如下:
[0026]
步骤5.1选择:计算原种群中每个个体被选中的概率pi,采用轮盘赌选择法,随机选择2个个体,分别记为gene_x、gene_y。其中,任一个体被选中的概率pi的计算可参见公式(4)。
[0027][0028]
步骤5.2交叉:基于个体gene_x、gene_y,利用两点交叉方法交换两者之间的部分染色体(航飞点排列片段),并对其中的部分冲突基因进行基因交换,确保无冲突基因,以此产生候选子代种群个体,分别记为gene_x_new、gene_y_new。
[0029]
步骤5.3变异:基于预设的变异概率ga_mutate_ratio,分别对gene_x_new、gene_
y_new进行选择基因位(航飞点点位)变异,即对变异染色体进行部分片段的颠倒。
[0030]
步骤5.4产生子代:重新评价gene_x_new、gene_y_new的适应度,经比较,将适应度评价值高的个体加入到下一代种群。
[0031]
步骤5.5重复步骤5.1至步骤5.4,直至下一代种群个体数量达到预设规模size。
[0032]
有益效果:与现有技术相比,本发明具有以下优点:
[0033]
(1)本发明在传统的遗传算法中引入了贪心机制,为航线规划过程提供了良好的初始种群,相较于传统遗传算法,既减少了航线距离又保证监测全覆盖,且提高了搜索效率。
[0034]
(2)本发明面向具有分布零散、形态各异等特征的土地整治图斑影像采集问题,基于无人机硬件参数模拟像片分布并提取航飞点,设计一种顾及贪心机制的遗传算法,高效解算航飞点编码最佳排序,实现无人机航飞路线规划,可显著提升无人机监测效率,节省无人机采集时间、像片数量、存储空间,在自然资源等领域的无人机监测场景中具有较好的应用价值。
附图说明
[0035]
图1为本发明流程图
[0036]
图2为航飞点提取示意图
[0037]
图3为交叉示意图
[0038]
图4为顾及贪心机制的遗传算法与传统遗传算法航线规划结果图
[0039]
图5为算法收敛曲线图
[0040]
图6为张桥村土地整治图斑正射影像图
具体实施方式
[0041]
下面对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
[0042]
本实施例选取江苏姜堰市张甸镇西部张桥村土地整治图斑监测为实验数据,利用大疆无人机m300 rtk,携带禅思p1相机进行图斑正射影像数据采集。
[0043]
如图1所示,本实施例的面向混合形态自然资源监测图斑的无人机航飞路线规划方法,采用顾及贪心机制生成初始化种群,减少后续遗传算法的盲目搜索,通过遗传算法多次迭代计算,在提高效率的同时,获得无人机航线最优解。具体包括如下步骤:
[0044]
步骤1航飞点提取:如图2(a)所示,输入张桥村土地整治图斑待监测图斑,设置种群规模size=335、遗传概率ga_choose_ratio=0.2、变异概率ga_mutate_ratio=0.05、迭代次数t=300。设计一种面向混合形态土地整治图斑航飞点提取方法,在实验区域范围内,选取数量最少、位置分布均匀、合理的骨架点,作为无人机飞行的航飞点,记航飞点数目为35个。具体步骤如下:
[0045]
步骤1.1:如图2(b)所示,根据禅思p1相机芯片宽度为d=24mm、焦距f=2.8mm,飞行航高为270m,计算可得单张像片对应尺寸为b=,无人机所拍摄一张像片所对应的地面大小约为2314m。
[0046]
步骤1.2:如图2(c)所示,根据参数b对实验区域模拟无人机飞行时所拍摄的像片,
将像片组成面图层。
[0047]
步骤1.3:如图2(d)所示,用自然资源监测图斑对步骤1.2所得面图层做空间筛选,筛选能完全覆盖且拍摄面积较小的面。
[0048]
步骤1.4:如图2(e)所示,提取步骤1.3所得面的质心点,即为航飞点,共35个。
[0049]
步骤2种群初始化:根据航飞点坐标计算各航飞点之间距离,组成距离矩阵d。对于任一航飞点spi(i=1,2,
…
,n),以spi作为当前航线li的起点,利用贪心机制,生成的所有航线l1,l2,
…
,l
355
的集合,遗传算法的初始种群。
[0050]
特别地,引入的贪心机制流程如下:先建立两个集合s、v-s,s集合中加入起点和终点,将需要遍历的航飞点存入v-s中,从v-s中选出离起点最近的点将其加入集合s中,并将该点从v-s中移除,不断循环,直至遍历完所有航飞点,得到最后的集合s,即为航线l。
[0051]
步骤3计算种群适应度:参见公式(2),对于任一种群个体li,计算其适应度的评价值,记为ai。ai值越大,其适应度越高,反之则适应度越低。
[0052]
步骤4获取父辈种群:参见公式(3),计算父辈种群个体数量为71。将原种群个体按照适应度评价值ai按照从大到小的顺序进行排列,筛选前71个个体,作为下一代遗传算法的父辈种群。
[0053]
步骤5遗传操作:基于步骤5获取的父辈种群,经355次随机选择、交叉、变异的过程,产生355个基因优良的子代个体,进入下一代种群。具体步骤如下:
[0054]
步骤5.1选择:根据公式(4)计算父辈种群中每个个体被选中的概率pi,采用轮盘赌选择法,随机选择2个个体,分别记为gene_x、gene_y。
[0055]
步骤5.2交叉:如图3所示,基于个体gene_x、gene_y,利用两点交叉方法交换两者之间的部分染色体(航飞点排列片段),并对其中的部分冲突基因进行基因交换,确保无冲突基因,以此产生候选子代种群个体,分别记为gene_x_new、gene_y_new。
[0056]
步骤5.3变异:基于预设的变异概率ga_mutate_ratio,分别对gene_x_new、gene_y_new进行选择基因位(航飞点点位)变异,即对变异染色体进行部分片段的颠倒。
[0057]
步骤5.4产生子代:重新评价gene_x_new、gene_y_new的适应度,经比较,将适应度评价值高的个体加入到下一代种群。
[0058]
步骤5.5:重复步骤5.1至步骤5.4,直至下一代种群个体数量达到预设规模355。
[0059]
步骤6迭代并输出结果:重复进行步骤3至步骤5的操作,经过300次迭代遗传,对于最终种群,计算并比较适应度评价值,获得并输出适应度评价值最大的航飞点序列,作为无人机最佳航飞路线。如图4(a)与图4(b)分别为本发明的顾及贪心机制的遗传算法与传统遗传算法经300次迭代后得到的航线规划结果,显然本文所提算法规划航线比传统遗传算法路径更为整齐与合理。如图5为两者的算法收敛曲线图,可见当迭代次数趋于280次时,传统的遗传算法目标函数收敛于某一个值,该值为规划的航线距离18657.988,而顾及贪心机制的遗传算法在迭代次数为30次时,开始收敛于固定值,其值为11264.053,相较于传统遗传算法,本发明算法既减少了航线距离又保证监测全覆盖,且提高了搜索效率。
[0060]
为更直观展示本发明的优势,分别采用传统航线规划与本发明的面向混合形态土地整治图斑的无人机航飞路线规划进行张桥村土地整治图斑正射影像数据采集。如表1,在相同的无人机飞行参数下,本发明的航线规划耗时12分钟、采集126张像片可实现图斑的全覆盖监测,影像存储空间为2.68g,而传统航线规划耗时30分钟、采集400张像片可实现图斑
的全覆盖监测,影像存储空间为4.55g。显然,本发明的航线规划极大提高了无人机在混合形态图斑监测的效率,节约采集时间近60%,像片数量减少68.5%,影像存储空间节约近41%。
[0061]
表1张桥村土地整治图斑正射影像采集实验结果
[0062][0063]
如图6(a1)为本发明的航线规划采集的张桥村土地整治图斑正射影像,如图6(b1),为本发明的航线规划采集的张桥村土地整治图斑正射影像。如图6(a2)与图6(b2)、图6(a3)与图6(b3)分别为同一图斑在两种航线下采集的影像,可见利用本发明的航线规划路径采集的正射影像质量与传统航线并无差异,满足自然资源土地整治业务需求。
[0064]
综上所述,本发明在传统的遗传算法中引入了贪心机制,为航线规划过程提供了良好的初始种群,相较于传统遗传算法,既减少了航线距离又保证监测全覆盖,且提高了搜索效率。)本发明面向具有分布零散、形态各异等特征的土地整治图斑影像采集问题,基于无人机硬件参数模拟像片分布并提取航飞点,设计一种顾及贪心机制的遗传算法,高效解算航飞点编码最佳排序,实现无人机航飞路线规划,可显著提升无人机监测效率,节约采集时间近60%,像片数量减少68.5%,影像存储空间节约近41%,在自然资源等领域的无人机监测场景中具有较好的应用价值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1