考虑控制死区的弹性飞行器智能控制方法
1.本发明涉及一种飞行器控制方法,特别是涉及一种考虑控制死区的弹性飞行器智能控制方法,属于飞行器控制领域。
背景技术:
2.飞行器机体结构的弹性振动产生气动弹性问题,影响结构动力学、开环机动性和稳定性,忽略这种影响会导致机体结构损坏或飞行不稳定。此外,输入非线性可能导致系统性能下降,特别是反馈控制系统中的死区输入,使控制信号在死区内不敏感,若处理不当则无法实现系统的有效调节,影响控制精度和系统稳定性。
3.《基于时标分解的弹性高超声速飞行器智能控制》(许斌,王霞,《航空学报》,2020,41(11):624387)一文针对飞行器气动弹性问题,基于时标分解进行模型变换,将刚弹耦合系统分解为刚体慢变子系统和弹性快变子系统,分别设计自适应控制和滑模控制,实现刚弹模态的稳定收敛。该设计忽略了控制死区对系统性能的影响,在死区内无法保证期望控制量的有效执行,因此难以取得较好的控制性能。
技术实现要素:
4.要解决的技术问题
5.针对具有输入死区的弹性体飞行器控制问题,本发明设计了一种基于奇异摄动分解的智能控制方法。
6.技术方案
7.一种考虑控制死区的弹性飞行器智能控制方法,其特征在于步骤如下:
8.步骤1:考虑弹性飞行器纵向通道动力学模型为
[0009][0010][0011][0012][0013][0014][0015]
所述运动学模型由七个状态量和两个控制输入u=[δe,φ]
t
组成;其中,v表示速度,h表示高度,γ表示航迹角,α表示攻角,q表示俯仰角速度,η和表示弹性模态,δe表示舵偏角,φ表示油门阀开度;m、i
yy
和g分别表示质量、俯仰轴的转动惯量和
重力引起的加速度;ζ、ω和n分别表示弹性模态的阻尼比、自然振动频率和广义力;
[0016]
力、力矩以及各系数的表达式为
[0017][0018]
其中,表示动压,s表示气动参考面积,表示平均气动弦长,z
t
表示推力力矩臂,表示推力力矩臂,和均表示气动参数;
[0019]
考虑死区输入非线性为
[0020][0021]
式中,u表示待设计的控制量,pr,p
l
,br和b
l
表示死区参数;
[0022]
式(8)进一步写为
[0023]
δe(u)=a(t)u+b(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0024]
式中,
[0025]
步骤2:定义高度跟踪误差为eh=h-hr,设计航迹角指令为
[0026][0027]
式中,hr表示高度参考指令,表示高度参考指令的一阶微分,kh》0和ki》0为设计参数;
[0028]
根据时标分离,将速度看作慢动态,设计航迹角指令的一阶微分为
[0029][0030]
式中,表示高度参考指令的二阶微分;
[0031]
步骤3:取χ1=γ,χ2=θ
p
和χ3=q,其中θ
p
=α+γ表示俯仰角;考虑死区输入非线性(9),姿态子系统(3)-(6)写为
[0032][0033]
式中,式中,
[0034]
定义ρ=1/ω2,ρσ=η和ρh3=β1,姿态子系统(12)进一步写为
[0035][0036]
令ρ=0,姿态子系统(13)进一步写为
[0037][0038]
式中,
‘
s’表示慢变子系统,δ
es
(us)表示慢变子系统的舵偏角,us表示慢变子系统待设计的控制量;
[0039]
定义可得姿态慢变子系统为
[0040][0041]
式中,f1(χ
1s
)和表示由式(15)得到的未知平滑非线性函数,满足|f1(χ
1s
)|≤f
1u
和其中f
1u
>0和f
3u
>0为已知函数;g1和g3表示由式(15)得到的未知函数,满足g1=g
10
+δg1和g3=g
30
+δg3,其中g
10
和g
30
为已知项,
△
g1和
△
g3为未知项;θ3表示由式(15)得到的未知函数;
>0、α
21
>0和α
22
>0为设计参数;
[0060]
设计自适应律为
[0061][0062][0063]
式中,γ1>0,κ1>0、ρ1>0和δ1>0为设计参数;
[0064]
定义俯仰角跟踪误差为
[0065]
e2=χ
2s-χ
2d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0066]
设计俯仰角速度虚拟控制量为
[0067][0068]
式中,k2>0为设计参数;
[0069]
设计微分器为
[0070][0071]
式中,χ
3d
表示χ
3c
通过式(28)所示微分器后获得的信号,为χ
3d
的一阶微分,ι3>0、α
31
>0和α
32
>0为设计参数;
[0072]
定义俯仰角速度跟踪误差为
[0073]
e3=χ
3s-χ
3d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(29)
[0074]
设计慢变子系统控制量为
[0075][0076]
式中,k3>0为设计参数,表示由式(17)-(18)设计的状态监测函数,表示θ
30
的估计值,θ
30
=θ3+δg3us;设计和为
[0077][0078][0079]
式中,表示的估计值,表示神经网络最优权重向量的估计值,表示神经网络基函数向量,为设计参数;
[0080]
设计自适应律为
[0081]
[0082][0083]
式中,γ3>0,κ3>0、ρ3>0和δ3>0为设计参数;
[0084]
步骤7:定义滑模面为
[0085]ef
=ψ1+cfψ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(35)
[0086]
式中,cf>0为设计参数;
[0087]
设计快变子系统的控制量为
[0088][0089]
式中,kf>0和为设计参数,表示θ
f0
的估计值,θ
f0
=θf+δgfuf;
[0090]
设计自适应律为
[0091][0092]
式中,ρf>0和δf>0为设计参数;
[0093]
步骤8:定义速度跟踪误差为
[0094][0095]
式中,vr为速度参考指令;
[0096]
设计速度子系统油门阀开度为
[0097][0098]
式中,k
pv
>0,k
iv
>0和k
dv
>0为设计参数;
[0099]
步骤9:根据得到的慢变子系统控制量us和快变子系统控制量uf,得到姿态子系统控制量为u=us+uf,则系统的实际舵偏角为δe(u)=a(t)u+b(t),结合速度子系统油门阀开度φ,返回到弹性飞行器纵向通道动力学模型(1)-(6),对高度和速度进行跟踪控制。
[0100]
一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
[0101]
一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
[0102]
一种计算机程序,其特征在于包括计算机可执行指令,所述指令在被执行时用于实现上述的方法。
[0103]
有益效果
[0104]
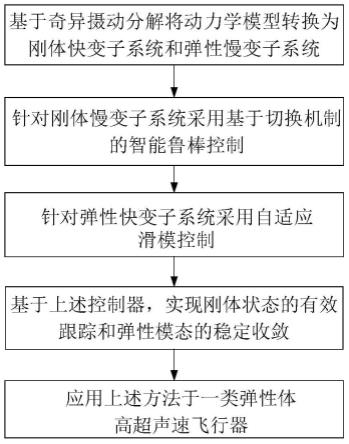
本发明提出的一种考虑控制死区的弹性飞行器智能控制方法,该方法考虑刚弹模态之间的不同时标特性,采用奇异摄动理论将刚弹耦合模型转化为刚体慢变子系统和弹性快变子系统。对于具有未知非线性的刚体子系统,利用切换机制构造鲁棒智能控制策略,实
现高度指令的有效跟踪。对于未知死区输入引起的时变控制增益问题,采用自适应估计保证系统稳定。对于弹性快变子系统,构造自适应滑模控制抑制弹性模态。该控制方案实现了具有死区输入弹性飞行器的快速稳定收敛,对飞行器安全可靠飞行具有重要意义。与现有技术相比有益效果为:
[0105]
(1)本发明基于奇异摄动分解理论给出了弹性飞行器的弹性模态抑制控制方案和刚体状态有效跟踪控制方案,实现了刚弹耦合系统的稳定收敛。
[0106]
(2)本发明考虑控制死区对系统控制性能的影响,引入自适应估计处理死区不敏感项,保证了执行器在死区内的响应特性。
[0107]
(3)本发明针对不确定气动参数引起的未知系统非线性,设计神经网络学习控制实现自适应估计,同时引入鲁棒设计保证系统控制性能。
附图说明
[0108]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0109]
图1本发明流程图。
具体实施方式
[0110]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0111]
参照图1,本发明一种考虑控制死区的弹性飞行器智能控制方法。具体步骤如下:
[0112]
(a)考虑弹性飞行器纵向通道动力学模型为
[0113][0114][0115][0116][0117][0118][0119]
所述运动学模型由七个状态量和两个控制输入u=[δe,φ]
t
组成;其中,v表示速度,h表示高度,γ表示航迹角,α表示攻角,q表示俯仰角速度,η和表示弹性模态,δe表示舵偏角,φ表示油门阀开度;m、i
yy
和g分别表示质量、俯仰轴的转动惯量和重力引起的加速度;ζ、ω和n分别表示弹性模态的阻尼比、自然振动频率和广义力。
[0120]
力、力矩以及各系数的表达式为
[0121][0122]
其中,表示动压,s表示气动参考面积,表示平均气动弦长,z
t
表示推力力矩臂,表示推力力矩臂,表示推力力矩臂,表示推力力矩臂,表示推力力矩臂,和
[0123]
考虑死区输入非线性为
[0124][0125]
式中,u表示待设计的控制量,pr=1+p
r0
sin(u-br),p
l
=1+p
l0
cos(u+b
l
),p
r0
=0.3,br=0.03,p
l0
=0.3,b
l
=0.03。
[0126]
式(8)进一步写为
[0127]
δe(u)=a(t)u+b(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0128]
其中,
[0129]
(b)定义高度跟踪误差为eh=h-hr,设计航迹角指令为
[0130][0131]
式中,hr表示高度参考指令,表示高度参考指令的一阶微分,kh=0.5和ki=0.1。
[0132]
根据时标分离,将速度看作慢动态,设计航迹角指令的一阶微分为
[0133][0134]
式中,表示高度参考指令的二阶微分。
[0135]
(c)取χ1=γ,χ2=θ
p
和χ3=q,其中θ
p
=α+γ表示俯仰角。考虑死区输入非线性(9),姿态子系统(3)-(6)写为
[0136][0137]
式中,式中,
[0138]
定义ρ=1/ω2,ρσ=η和ρh3=β1,姿态子系统(12)进一步写为
[0139][0140]
令ρ=0,姿态子系统(13)进一步写为
[0141][0142]
式中,
‘
s’表示慢变子系统,δ
es
(us)表示慢变子系统的舵偏角,us表示慢变子系统待设计的控制量。
[0143]
定义可得姿态慢变子系统为
[0144][0145]
式中,
θ3=g3b(t),g3=g3a(t)
[0146]
(d)定义快变变量ψ1=σ-σ
1s
和新的时间尺度其中可得快变子系统为
[0147][0148]
式中,a0(t)=a(t)-1,uf=u-us表示快变子系统待设计的控制量。
[0149]
(e)设计系统状态监测函数为
[0150][0151][0152]
式中,
[0153]
(f)定义航迹角跟踪误差为
[0154]
e1=χ
1s-γdꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0155]
设计俯仰角虚拟控制量为
[0156][0157]
式中,k1=1,s1(χ
1s
)表示由式(17)-(18)设计的状态监测函数,表示θ
10
的估计值,θ
10
=δg1χ
2s
。设计和为
[0158][0159][0160]
式中,表示f1(χ
1s
)的估计值,表示神经网络最优权重向量的估计值,θ1(χ
1s
)表示神经网络基函数向量,
[0161]
设计微分器为
[0162][0163]
式中,χ
2d
表示χ
2c
通过式(23)所示微分器后获得的信号,为χ
2d
的一阶微分,ι2=0.2、α
21
=5和α
22
=2。
[0164]
设计自适应律为
[0165][0166][0167]
式中,γ1=0.5,κ1=0.1、ρ1=10和δ1=0.01。
[0168]
定义俯仰角跟踪误差为
[0169]
e2=χ
2s-χ
2d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0170]
设计俯仰角速度虚拟控制量为
[0171][0172]
式中,k2=2。
[0173]
设计微分器为
[0174][0175]
式中,χ
3d
表示χ
3c
通过式(28)所示微分器后获得的信号,为χ
3d
的一阶微分,ι3=0.2、α
31
=5和α
32
=2。
[0176]
定义俯仰角速度跟踪误差为
[0177]
e3=χ
3s-χ
3d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(29)
[0178]
设计慢变子系统控制量为
[0179][0180]
式中,k3=20,表示由式(17)-(18)设计的状态监测函数,表示θ
30
的估计值,θ
30
=θ3+δg3us。设计和为
[0181][0182][0183]
式中,表示的估计值,表示神经网络最优权重向量的估计值,表示神经网络基函数向量,
[0184]
设计自适应律为
[0185][0186][0187]
式中,γ3=0.5,κ3=0.1、ρ3=10和δ3=0.01。
[0188]
(g)定义滑模面为
[0189]ef
=ψ1+cfψ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(35)
[0190]
式中,cf=1。
[0191]
设计快变子系统的控制量为
[0192][0193]
式中,kf=1,表示θ
f0
的估计值,θ
f0
=θf+δgfuf。
[0194]
设计自适应律为
[0195][0196]
式中,ρf=10和δf=0.01。
[0197]
(h)定义速度跟踪误差为
[0198][0199]
式中,vr为速度参考指令。
[0200]
设计速度子系统油门阀开度为
[0201][0202]
式中,k
pv
=0.5,k
iv
=0.02和k
dv
=0.01。
[0203]
(i)根据得到的慢变子系统控制量us和快变子系统控制量uf,得到姿态子系统控制量为u=us+uf,则系统的实际舵偏角为δe(u)=a(t)u+b(t),结合速度子系统油门阀开度φ,返回到弹性飞行器纵向通道动力学模型(1)-(6),对高度和速度进行跟踪控制。
[0204]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1