自动监管终端、人员工作时间的估计方法以及估计装置与流程
1.本技术属于智能制造和物联网技术领域,具体涉及一种面向设备操作人员的物联网自动监管终端、人员工作时间的估计方法以及估计装置。
背景技术:
2.随着物联网时代来临,工业应用领域开始整合各种技术,并掀起新一波工业革命,也就是工业4.0革命。而工业4.0革命目的是传统制造业运用it技术提升能量,使其转型成全面自动化生产的智能工厂,实现智能生产、个性订制和批量生产。而在工业物联网的核心是利用局部网络或互联网等通信技术,把传感器、控制器、人员和物品等通过新方式联系在一起,形成人与物,物与物互联,实现信息化和智能化的网络,从而最大限度地提高工厂效率。目前,学者侧重于研究各种人工智能算法在工业物联网的应用,例如,kan c等人通过机器学习和深度学习对工业物联网进行各种改进,提高了工厂的生产效率和客户满意度。nhu vh等人将深度学习算法用于工业物联网的识别、分类和决策的数据分析,从而提供了高效和精确的资源调度。但是现有的工业物联网研究侧重优化产品生产,但是没有改进传统基础设施,无法对员工工作效率进行有效监管。
3.然而,在目前很多缝纫机、织袜机、印刷机等传统劳动密集型产业中,存在大量的设备操作人员。此时,对于设备操作人员的管理,仍存在以下问题:设备操作人员众多,目前很多仍采用传统的上下班打卡统计设备操作人员的出勤,功能较少,上级管理员也无法准确知道设备操作人员实际工作情况并对他们有效分配工作,无法做到管理监督无法精确到个人。而这会导致一部分懈怠偷懒的设备操作人员,浑水摸鱼,其工作效率低,但是拿到和其他人员差不多的工资,一部分设备操作人员积极工作,工作量大,但是工资绩效难以体现,管理人员无法第一时间分配其他工作,也降低了其工作效率。因此,针对数量众多的设备操作人员,管理人员无法准确管理到个人,无法准确评估设备操作员工的工作效率,难以做到公平公正的绩效奖惩制度,从而降低了设备操作人员的工作积极性和公司工作效益。
技术实现要素:
4.本技术实施例的目的是提供一种面向设备操作人员的物联网自动监管终端、设备操作人员工作时间的估计方法以及评估装置,能够解决针对数量众多的设备操作人员,管理人员无法准确管理到个人,无法准确评估设备操作员工的工作效率,难以做到公平公正的绩效奖惩制度,从而降低了设备操作人员的工作积极性和公司工作效益的技术问题。
5.为了解决上述技术问题,本技术是这样实现的:
6.第一方面,本技术实施例提供了一种面向设备操作人员的物联网自动监管终端,其特征在于,包括插头和终端主体;
7.插头与终端主体连接;
8.插头上设有开关模块和rfid卡模块;
9.开关模块用于启动电源的开关模块;
10.rfid卡模块用于提供设备id;
11.终端主体上设有wifi模块、蓝牙模块、时钟模块、看门狗模块、电路状态指示灯模块、按键模块、蜂鸣器模块、对外接口模块、调试接口模块、rfid读取模块、三相电压电流检测模块、主控芯片模块和电源转换模块;
12.wifi模块用于实现无线局域网通信;
13.蓝牙模块用于实现与外部设备通信;
14.时钟模块用于提供系统时钟;
15.看门狗模块用于程序定时喂狗;
16.电路状态指示灯模块用于根据电路状态显示不同颜色;
17.按键模块用于复位和切换功能;
18.蜂鸣器模块用于报警;
19.对外接口模块用于对外提供5v 2a电流并进行通信;
20.调试接口模块用于进行程序升级和调试;
21.rfid读取模块用于读取设备操作人员rfid标签;
22.三相电压电流检测模块用于采集设备工作实时电流、电压和功率;
23.主控芯片模块用于控制设备和进行数据处理;
24.电源转换模块用于为设备提供电力。
25.第二方面,本技术实施例提供了一种设备操作人员工作时间的估计方法,其特征在于,应用于第一方面的物联网自动监管终端,估计方法包括:
26.s101:将物联网自动监管终端安装上被监测设备上,通过三相电压电流检测模块读取被监测设备的电流、电压、功率值等设备运行数据m,同时记录当前设备操作人员的工作状态,当设备操作人员处于工作状态时,记录其工作状态值为1,否则为0,获得工作时间评估的4
×gs
维数据集,其中,gs表示数据集的元素个数,xn表示数据集中的第n个元素;
27.s102:获取训练集和测试集;
28.s103:训练输入权重矩阵wa和输出权重矩阵wb;
29.s104:根据设备运行数据m、输入权重矩阵wa和输出权重矩阵wb,通过公式1计算当前数据的工作评估结果矩阵r,通过公式2计算当前数据的工作评估结果r
l
;
30.r=wb·
g(wam
t
)公式1
31.其中,g()表示激活函数;
[0032][0033]
其中,r
bl
表示工作评估时第l个数据判断为工作状态b的概率。
[0034]
s105:根据工作评估结果r
l
,评估设备操作人员的工作状态,并根据rfid读取模块采集到的设备操作人员的打卡信息,统计和输出设备操作人员出勤时的工作时间。
[0035]
第三方面,本技术实施例提供了一种设备操作人员工作时间的估计装置,其特征在于,应用于根据权利要求1至4的物联网自动监管终端,估计装置包括:
[0036]
检测模块,用于将物联网自动监管终端安装上被监测设备上,通过三相电压电流检测模块读取被监测设备的电流、电压、功率值等设备运行数据m,同时记录当前设备操作人员的工作状态,当设备操作人员处于工作状态时,记录其工作状态值为1,否则为0,获得
工作时间评估的4
×gs
维数据集,其中,gs表示数据集的元素个数,xn表示数据集中的第n个元素;
[0037]
获取模块,用于获取训练集和测试集;
[0038]
训练模块,用于训练输入权重矩阵wa和输出权重矩阵wb;
[0039]
评估模块,用于根据设备运行数据m、输入权重矩阵wa和输出权重矩阵wb,通过公式1计算当前数据的工作评估结果矩阵r,通过公式2计算当前数据的工作评估结果r
l
;
[0040]
r=wb·
g(wam
t
)公式1
[0041]
其中,g()表示激活函数;
[0042][0043]
其中,r
bl
表示工作评估时第l个数据判断为工作状态b的概率。
[0044]
统计模块,用于根据工作评估结果r
l
,评估设备操作人员的工作状态,并根据rfid读取模块采集到的设备操作人员的打卡信息,统计和输出设备操作人员出勤时的工作时间。
[0045]
在本技术实施例中,将物联网自动监管终端安装上被监测设备上,通过三相电压电流检测模块读取被监测设备的电流、电压、功率值等设备运行数据,评估设备操作人员的工作状态,并根据rfid读取模块采集到的设备操作人员的打卡信息,统计和输出设备操作人员出勤时的工作时间。准确管理和评估每一个设备操作人员的工作时间以及工作效率,进而做出公平公正的绩效奖惩制度,提高了设备操作人员的工作积极性和公司工作效益。
附图说明
[0046]
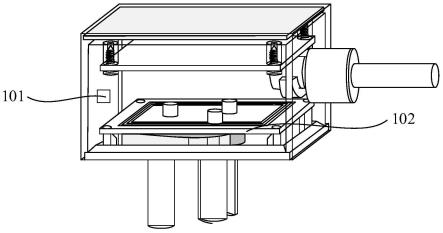
图1是本技术实施例提供的一种物联网自动监管终端的外观结构图之一;
[0047]
图2是本技术实施例提供的一种物联网自动监管终端的外观结构图之一;
[0048]
图3是本技术实施例提供的一种硬件结构图;
[0049]
图4是本技术实施例提供的一种设备操作人员工作时间的估计方法的流程图;
[0050]
图5是本技术实施例提供的一种设备操作人员工作时间的估计装置的结构示意图。
[0051]
1-插头,101-开关模块,102-rfid卡模块;
[0052]
2-终端主体,201-wifi模块、202-蓝牙模块、203-时钟模块、204-看门狗模块、205-电路状态指示灯模块、206-按键模块、207-蜂鸣器模块、208-对外接口模块、209-调试接口模块、210-rfid读取模块、211-三相电压电流检测模块、212-主控芯片模块、213-电源转换模块;
[0053]
3-插座;
[0054]
4-云服务器;
[0055]
5-用户手机。
[0056]
本发明目的的实现、功能特点及优点将结合实施例、参照附图做进一步说明。
具体实施方式
[0057]
为使本发明的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附
图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0058]
下面结合附图,通过具体的实施例及其应用场景对本技术实施例提供的大型商业综合体的安全管理水平估计方法进行详细地说明。
[0059]
实施例一
[0060]
参照图1和图2,示出了本技术实施例提供的一种物联网自动监管终端的外观结构图。
[0061]
本技术提供的一种面向设备操作人员的物联网自动监管终端,其特征在于,包括插头1和终端主体2。
[0062]
插头1与终端主体2连接,插头1是终端主体2与外界建立连接的一种有效的方式,可选地,通过插头1与外部插座的连接,可以使得终端主体2与外部插座建立通信连接;可选地,通过插头1与外部插座的连接,可以由外部插座向终端主体2进行供电。
[0063]
插头1上设有开关模块101和rfid卡模块102。
[0064]
开关模块101用于启动电源的开关模块,通过开关模块101可以对电源进行导通或者关闭。
[0065]
可选地,开关模块101具体包括1个开关。
[0066]
rfid卡模块102用于提供设备id,不同的物联网自动监管终端拥有不同的设备id,这样可以进一步地方便管理。
[0067]
可选地,rfid卡模块102的数量为1个。
[0068]
终端主体2上设有wifi模块201、蓝牙模块202、时钟模块203、看门狗模块204、电路状态指示灯模块205、按键模块206、蜂鸣器模块207、对外接口模块208、调试接口模块209、rfid读取模块210、三相电压电流检测模块211、主控芯片模块212和电源转换模块213。
[0069]
wifi模块201用于实现无线局域网通信。
[0070]
可选地,wifi模块201采用esp8266芯片,该芯片支持无线80211b/g/n标准和sta/ap/sta+ap三种工作模式,内置ctp/ip协议线,可多路tcpclient连接,可接收丰富的socketat指令,具有uart/gpio数据通信接口,支持远程固件升级(ota),内置32位mcu,可兼做应用处理器,超低能耗,适合电池供电应用。
[0071]
蓝牙模块202用于实现与外部设备通信。
[0072]
可选地,蓝牙模块202采用st17h26芯片,该芯片是低功耗芯片、内部空间为16k,同时支持外挂eeprom耗芯片防丢器、广泛用于智能灯/群控灯、智能锁以及其他智能家居物联网产品。
[0073]
通过wifi模块201和蓝牙模块202可以接收订单信息,设备操作人员完成被分配的订单后,可以通过终端接收下一个订单,将时间管理和工作安排精确到个体。由于将不同的工作分配到个人,每个人分工明确,从而减少了员工的偷懒情况,同时,可估计设备操作人员的工作时间和工作完成度,并实施相应奖惩制度,提高工作效率高的人员收入待遇,提高了公司的工作效益。时钟模块203用于提供系统时钟。
[0074]
可选地,时钟模块203采用ds1302芯片,该芯片内含一个实时时钟/日历和31字节静态ram,通过简单的串行接口与单片机进行通。实时时钟/日历电路提供秒、分、时、日、周、
月、年的信息,每月的天数和闰年的天数可自动调整。时钟操作可通过am/pm指示决定采用24或12小时格式。ds1302与单片机之间能简单地采用同步串行的方式进行通信,仅需用到三个口线:rst复位、i/o数据线、sclk串行时钟。时钟/ram的读/写数据以一个字节或多达31个字节的字符组方式通信。ds1302工作时功耗很低保持数据和时钟信息时功率小于1mw。
[0075]
看门狗模块204用于程序定时喂狗。
[0076]
可选地,系统程序控制看门狗模块204定时喂狗,当3s内不喂狗,程序将自动重启,保护程序避免死循环。
[0077]
可选地,看门狗模块204采用ds1232芯片,该芯片具有电源指示灯及输入输出指示灯,支持ttl通讯,四位数码管显示编程,由两位按键输入编程控制,单路输入支持0-5v模拟量且继电器控制输出,外置晶振11.0592m,输出有光电隔离,具有防反接保护、过流保护、续流保护,具有看门狗功能,可以防止系统死机。
[0078]
电路状态指示灯模块205用于根据电路状态显示不同颜色。
[0079]
可选地,电路状态指示灯模块205的数量为5个。
[0080]
可选地,电路状态指示灯模块205带有独立灯板,灯板上带有5个led贴片灯,颜色tbd,作为盒子状态和功能的指示,搭配按键切换功能/启停而变化,灯的亮灭可由主芯片gpio控制且灯的亮度足够,室内照明条件下工作人员可清晰分辨灯的亮暗情况。
[0081]
按键模块206用于复位和切换功能。
[0082]
可选地,案件模块206包括2个按键,其中一个是针孔复位按键,短按复位,长按恢复出厂设置,另外一个是功能按键,便于触碰。
[0083]
蜂鸣器模块207用于报警。
[0084]
可选地,可通过主控芯片模块212的gpio接口控制鸣响。
[0085]
可选地,蜂鸣器模块207采用蜂鸣器0905芯片,该芯片为有源电磁式直插超小薄型,工作电压为3v/5v/12v,尺寸大小为直径9mm、高5.5mm,一体环保耐高温可波峰焊。
[0086]
对外接口模块208用于对外提供5v 2a电流并进行通信。
[0087]
可选地,对外接口模块208带有一个usb接口,可对外提供5v2a电流,且可进行通信,满足usb2.0标准,具备otg功能,带有一个rs232串口,可与设备串口进行通信;带有一个ttl接口,可支持5v ttl通信。
[0088]
调试接口模块209用于进行程序升级和调试。
[0089]
可选地,调试接口模块209便于插拔,无需拆开壳体,且插拔时无高压区触电风险。
[0090]
rfid读取模块210用于读取设备操作人员rfid标签。
[0091]
rfid读取模块210可用于日常考勤打卡,rfid读取不会误读临近工位的rfid标签,可准确读取固定插座上的rfid标签,从而终端操作人员的工作时间估计的启动和关闭。
[0092]
可选地,rfid读取模块采用mfrc522芯片,该芯片可准确读取设备操作人员的rfid标签,从而记录操作人员的出勤情况,并开启和关闭工作时间的估计。该芯片利用先进的调制和解调概念,集成了在13.56mhz下所有类型的被动非接触式通信方式和协议。支持14443a兼容应答器信号。数字部分处理iso014443a帧和错误检测。此外,还支持快速crypto1加密算法,用语验证mifare系列产品。mfrc522支持mifare系列更高速的非接触式通信,双向数据传输速率高达424kbit/s。它与主机间通信采用spi模式,有利于减少连线,缩小pcb板体积,降低成本。
[0093]
三相电压电流检测模块211用于采集设备工作实时电流、电压和功率。
[0094]
可选地,三相电压电流检测模块211采用jblgk-350模块,该模块是工业级电压电流模块,可采集交流三相电压、电流、有功、无功、功率因数、累计电量、频率、相序、温度等电参数,三相相电压0-370v,采集精度0.5%,三相线电压0-640v,采集频率25hz,功耗24v/1w,具有内置看门狗保护、宽温度工作范围、隔离防雷防浪涌、绝缘端子防振动等特点。
[0095]
主控芯片模块212用于控制设备和进行数据处理。
[0096]
可选地,主控芯片模块212采用rk3308芯片,该芯片针对专门音频和iot应用而设计,cpu采用4核arm cortex-a35(64位架构,高性能,低功耗),整合高性能codec(8通道adc+2通道dac),直接支持最大8通道模拟mic阵列+回采,无需外加adc,集成主流数字音频输入输出接口,为低功耗应用开发了硬件语音检测模块(vad),显著降低系统bom成本。
[0097]
电源转换模块213用于为设备提供电力。
[0098]
可选地,电源转换模块213采用lm2596芯片,该芯片是德州仪器(ti)生产的3a电流输出降压开关型集成稳压芯片,它内含固定频率振荡器(150khz)和基准稳压器(1.23v),并具有完善的保护电路、电流限制、热关断电路等。利用该器件只需极少的外围器件便可构成高效稳压电路。
[0099]
参照图3,示出了本技术实施例提供的一种硬件结构图。
[0100]
进一步地,在本技术实施例中,主控芯片模块212分别与wifi模块201、蓝牙模块202、时钟模块203、看门狗模块204、电路状态指示灯模块205、按键模块206、蜂鸣器模块207、对外接口模块208、调试接口模块209、rfid读取模块210和三相电压电流检测模块211连接;
[0101]
电源转换模块213分别与wifi模块201、蓝牙模块202、时钟模块203、看门狗模块204、电路状态指示灯模块205、按键模块206、蜂鸣器模块207、对外接口模块208、调试接口模块209、rfid读取模块210、三相电压电流检测模块211和主控芯片模块212连接;
[0102]
开关模块101与电源转换模块213连接,以实现电源转换模块213的开启和关闭。
[0103]
进一步地,在本技术实施例中,物联网自动监管终端还包括智能插座3、云服务器4和用户手机5;
[0104]
rfid卡模块102与智能插座3连接,rfid卡模块102向智能插座3提供设备id,智能插座3用于读取插头1中rfid卡、识别终端序号;
[0105]
具体地,插头1与智能插座3是相互适配的,在插头1插入到智能插座3中时,rfid卡模块102与智能插座3电连接,智能插座3可以设置rfid读卡器,通过rfid读卡器采集插头1上的rfid标签,准确地确定每一个终端。
[0106]
采用智能插座3与插头1的相互适配读取rfid标签以确定每一个终端,具有较强的实用性和自主性。
[0107]
智能插座3与云服务器4通信连接,云服务器4用于接收智能插座3的数据。进一步地,在本技术实施例中,rfid卡模块102与智能插座3连接,rfid卡模块102向智能插座3提供设备id;
[0108]
wifi模块201与云服务器4通信连接,云服务器4用于接收终端主体2的数据。
[0109]
蓝牙模块202与用户手机5通信连接,用户手机5用于接收终端主体2的数据。
[0110]
在本技术实施例中,将物联网自动监管终端安装上被监测设备上,通过三相电压
电流检测模块读取被监测设备的电流、电压、功率值等设备运行数据,评估设备操作人员的工作状态,并根据rfid读取模块采集到的设备操作人员的打卡信息,统计和输出设备操作人员出勤时的工作时间。准确管理和评估每一个设备操作人员的工作时间以及工作效率,进而做出公平公正的绩效奖惩制度,提高了设备操作人员的工作积极性和公司工作效益。
[0111]
实施例二
[0112]
参照图4,示出了本技术实施例提供的设备操作人员工作时间的估计方法的流程图。
[0113]
本技术实施例提供的设备操作人员工作时间的估计方法,应用于实施例一的物联网自动监管终端。
[0114]
估计方法包括:
[0115]
s101:将物联网自动监管终端安装上被监测设备上,通过三相电压电流检测模块211读取被监测设备的电流、电压、功率值等设备运行数据m,同时记录当前设备操作人员的工作状态,当设备操作人员处于工作状态时,记录其工作状态值为1,否则为0,获得工作时间评估的4
×gs
维数据集。
[0116]
其中,gs表示数据集的元素个数,xn表示数据集中的第n个元素。
[0117]
s102:获取训练集和测试集。
[0118]
可选地,s102可由子步骤s1021至s1024来完成。
[0119]
s1021:初始化训练参数,设置阈值为20000,阈值为5000,参数a为0.2,训练集中每一个分类的元素个数阈值为200,训练迭代次数为1等。s1022:通过公式3计算训练集中元素个数g
x
,通过公式4计算隐藏层个数y,通过公式5计算训练集中工作和不工作两个分类的最大元素个数f
max
;
[0120][0121]
其中,gs表示数据集中元素个数,min()表示选最小值函数;
[0122][0123][0124]
s1023:通过公式6计算工作和不工作两个分类的初始元素个数fb;
[0125]
fb=max(f
max
,(gbg
x
/gs)),b=1或0公式6
[0126]
其中,gb表示数据集中属于分类b的元素个数。当b=1时,表示操作人员正在工作,b=0表示操作人员不在工作,令b=0,c=1,l=1,分类b的第l个元素为d
bl
;
[0127]
s1024:如果c小于或等于fb,则d
bl
=xc,xc表示训练集中第c个元素,c=c+1,l=l+1,重新进行s1024,否则如果c大于fb,且小于或等于gb,则存在多余的元素,通过公式7寻找所有d
bl
,l=1,...,fb中一个元素与元素xc的距离最大,获得该元素序号lc,通过公式8更新该元素,
[0128]
lc=argmax(|d
bl-xc|),l=1,...,fb公式7
[0129]
其中,argmax()表示最大值所对应的元素序号,||表示两个元素之间的距离,
[0130]
其中,表示更新后的元素;
[0131]
c=c+1,如果c大于gb且b=0,则b=1,c=1,重新进行s1024,否则,将所有d
bl
,组成训练集,数据集中除了训练集中的元素以外的元素组成测试集。s103:训练输入权重矩阵wa和输出权重矩阵wb。
[0132]
可选地,s103可由子步骤s1031至s1034来完成。
[0133]
s1031:根据训练集和测试集,获得带有序列模式的训练矩阵h和测试矩阵s,在区间[-1/4,1/4]中随机初始化带有输入权重的y
×
4维度矩阵wa,令带有输出权重的2
×
y度矩阵为wb;
[0134]
s1032:通过公式9计算隐藏层参数u,通过公式10计算隐藏层神经元的输出o;
[0135]
u=wax
t
公式9
[0136]
其中,x
t
是矩阵x的转置;
[0137]
o=g(u)公式10
[0138]
其中,g()表示激活函数,可表示为g(u)=(1+e-u
)-1
。
[0139]
s1033:通过公式11计算输出权重矩阵wb,通过公式12计算训练集的分类评估结果q,通过公式13获得训练集中每一个元素的分类评估结果q
l
;
[0140][0141]
其中,t表示隐藏层和输出层的关联标志矩阵,是o的伪逆矩阵;
[0142]
q=wbo公式12
[0143][0144]
其中,q
l
表示长度为fb的训练集元素分类结果,q
bl
表示训练集中第l个数据判断为工作状态b的概率。根据训练集分类评估结果,计算训练集的分类评估准确率;
[0145]
如果分类评估准确率大于阈值k1,则进行s1034,否则采用adam梯度下降算法更新权重聚类wa,重新进行s1032;
[0146]
s1034:通过公式14计算测试集的分类评估结果矩阵z,通过公式15获得测试集中每一个元素的分类评估结果;
[0147]
z=wb·
g(was
t
)公式14
[0148][0149]
其中,z
bl
表示测试集中第l个数据判断为工作状态b的概率;
[0150]
根据测试集分类评估结果,计算测试集的分类评估准确率;
[0151]
如果测试集的分类评估准确率大于阈值k2,则训练结束,获得训练好的输入权重矩阵wa和输出权重矩阵wb,否则在区间[-1/4,1/4]中随机初始化带有输入权重的y
×
4维度矩阵wa,训练迭代次数加1;如果训练迭代次数大于阈值k3,则表示训练不收敛,结束算法,输出“训练不收敛”的报警信息,否则重新进行s1032。
[0152]
s104:根据设备运行数据m、输入权重矩阵wa和输出权重矩阵wb,通过公式1计算当
前数据的工作评估结果矩阵r,通过公式2计算当前数据的工作评估结果r
l
;
[0153]
r=wb·
g(wam
t
)公式1
[0154]
其中,g()表示激活函数;
[0155][0156]
其中,r
bl
表示工作评估时第l个数据判断为工作状态b的概率。
[0157]
s105:根据工作评估结果r
l
,评估设备操作人员的工作状态,并根据rfid读取模块210采集到的设备操作人员的打卡信息,统计和输出设备操作人员出勤时的工作时间。
[0158]
在本技术实施例中,基于快速极限学习的设备操作人员工作时间评估方法,先通过物联网自动监管终端收集数据集,并根据数据集的大小,通过隐藏层个数选择,输出层个数选择,训练集个数选择,训练集的元素确定等方法,获得低规模和高可靠的训练集,从而减低大规模矩阵的计算、存储和伪反转,有效提高训练的速度。根据筛选的训练集,采用极限学习机实现模型的训练和工作时间估计,从而减少训练误差,并具有良好的泛化能力,可适用于不同种类设备的操作人员工作时间估计。
[0159]
在本技术实施例中,有效解决不同种类设备操作人员的工作时间估计问题,具有安装方便、扩展灵活、管理方便、互联互通等特点,从而提高设备操作人员的工作时间评估准确率,降低不同设备对评估的干扰,将时间管理和工作安排精确到员工个体。
[0160]
在本技术实施例中,将物联网自动监管终端安装上被监测设备上,通过三相电压电流检测模块读取被监测设备的电流、电压、功率值等设备运行数据,评估设备操作人员的工作状态,并根据rfid读取模块采集到的设备操作人员的打卡信息,统计和输出设备操作人员出勤时的工作时间。准确管理和评估每一个设备操作人员的工作时间以及工作效率,进而做出公平公正的绩效奖惩制度,提高了设备操作人员的工作积极性和公司工作效益
[0161]
实施例三
[0162]
参照图5,示出了本技术实施例提供的一种设备操作人员工作时间的估计装置50的结构示意图。
[0163]
本技术实施例提供的设备操作人员工作时间的估计装置50,应用于实施例一的物联网自动监管终端。
[0164]
估计装置50包括:
[0165]
检测模块501,用于将物联网自动监管终端安装上被监测设备上,通过三相电压电流检测模块211读取被监测设备的电流、电压、功率值等设备运行数据m,同时记录当前设备操作人员的工作状态,当设备操作人员处于工作状态时,记录其工作状态值为1,否则为0,获得工作时间评估的4
×gs
维数据集,其中,gs表示数据集的元素个数,xn表示数据集中的第n个元素;
[0166]
获取模块502,用于获取训练集和测试集;
[0167]
训练模块503,用于训练输入权重矩阵wa和输出权重矩阵wb;
[0168]
评估模块504,用于根据设备运行数据m、输入权重矩阵wa和输出权重矩阵wb,通过公式1计算当前数据的工作评估结果矩阵r,通过公式2计算当前数据的工作评估结果r
l
;
[0169]
r=wb·
g(wam
t
)公式1
[0170]
其中,g()表示激活函数;
[0171][0172]
其中,r
bl
表示工作评估时第l个数据判断为工作状态b的概率。
[0173]
统计模块505,用于根据工作评估结果r
l
,评估设备操作人员的工作状态,并根据rfid读取模块210采集到的设备操作人员的打卡信息,统计和输出设备操作人员出勤时的工作时间。
[0174]
可选地,获取模块502具体用于:
[0175]
初始化训练参数,设置阈值为20000,阈值为5000,参数a为0.2,训练集中每一个分类的元素个数阈值为200,训练迭代次数为1等。
[0176]
通过公式3计算训练集中元素个数g
x
,通过公式4计算隐藏层个数y,通过公
[0177]
式5计算训练集中工作和不工作两个分类的最大元素个数f
max
;
[0178][0179]
其中,gs表示数据集中元素个数,min()表示选最小值函数;
[0180][0181][0182]
通过公式6计算工作和不工作两个分类的初始元素个数fb;
[0183]
fb=max(f
max
,(gbg
x
/gs)),b=1或0公式6
[0184]
其中,gb表示数据集中属于分类b的元素个数。当b=1时,表示操作人员正在工作,b=0表示操作人员不在工作,令b=0,c=1,l=1,分类b的第l个元素为d
bl
;
[0185]
如果c小于或等于fb,则d
bl
=xc,xc表示训练集中第c个元素,c=c+1,l=l+1,重新进行更新元素,否则如果c大于fb,且小于或等于gb,则存在多余的元素,通过公式7寻找所有d
bl
,l=1,...,fb中一个元素与元素xc的距离最大,获得该元素序号lc,通过公式8更新该元素,
[0186]
lc=argmax(|d
bl-xc|),l=1,...,fb公式7
[0187]
其中,argmax()表示最大值所对应的元素序号,||表示两个元素之间的距离,
[0188]
其中,表示更新后的元素;
[0189]
c=c+1,如果c大于gb且b=0,则b=1,c=1,重新进行s1024,否则,将所有d
bl
,组成训练集,数据集中除了训练集中的元素以外的元素组成测试集。可选地,训练模块503具体用于:
[0190]
根据训练集和测试集,获得带有序列模式的训练矩阵h和测试矩阵s,在区间[-1/4,1/4]中随机初始化带有输入权重的y
×
4维度矩阵wa,令带有输出权重的2
×
y度矩阵为wb;
[0191]
通过公式9计算隐藏层参数u,通过公式10计算隐藏层神经元的输出o;
[0192]
u=wax
t
公式9
[0193]
其中,x
t
是矩阵x的转置;
[0194]
o=g(u)公式10
[0195]
其中,g()表示激活函数,可表示为g(u)=(1+e-u
)-1
。
[0196]
通过公式11计算输出权重矩阵wb,通过公式12计算训练集的分类评估结果q,通过公式13获得训练集中每一个元素的分类评估结果q
l
;
[0197][0198]
其中,t表示隐藏层和输出层的关联标志矩阵,是o的伪逆矩阵;
[0199]
q=wbo公式12
[0200][0201]
其中,q
l
表示长度为fb的训练集元素分类结果,q
bl
表示训练集中第l个数据判断为工作状态b的概率。根据训练集分类评估结果,计算训练集的分类评估准确率;
[0202]
如果分类评估准确率大于阈值k1,则计算测试集的分类评估结果,否则采用adam梯度下降算法更新权重聚类wa,重新计算隐藏层参数u;
[0203]
通过公式14计算测试集的分类评估结果矩阵z,通过公式15获得测试集中每一个元素的分类评估结果;
[0204]
z=wb·
g(was
t
)公式14
[0205][0206]
其中,z
bl
表示测试集中第l个数据判断为工作状态b的概率;
[0207]
根据测试集分类评估结果,计算测试集的分类评估准确率;
[0208]
如果测试集的分类评估准确率大于阈值k2,则训练结束,获得训练好的输入权重矩阵wa和输出权重矩阵wb,否则在区间[-1/4,1/4]中随机初始化带有输入权重的y
×
4维度矩阵wa,训练迭代次数加1;如果训练迭代次数大于阈值k3,则表示训练不收敛,结束算法,输出“训练不收敛”的报警信息,否则重新进行计算隐藏层参数。
[0209]
本技术实施例提供的估计装置50能够实现上述方法实施例中实现的各个过程,为避免重复,这里不再赘述。
[0210]
在本技术实施例中,基于快速极限学习的设备操作人员工作时间评估方法,先通过物联网自动监管终端收集数据集,并根据数据集的大小,通过隐藏层个数选择,输出层个数选择,训练集个数选择,训练集的元素确定等方法,获得低规模和高可靠的训练集,从而减低大规模矩阵的计算、存储和伪反转,有效提高训练的速度。根据筛选的训练集,采用极限学习机实现模型的训练和工作时间估计,从而减少训练误差,并具有良好的泛化能力,可适用于不同种类设备的操作人员工作时间估计。
[0211]
在本技术实施例中,有效解决不同种类设备操作人员的工作时间估计问题,具有安装方便、扩展灵活、管理方便、互联互通等特点,从而提高设备操作人员的工作时间评估准确率,降低不同设备对评估的干扰,将时间管理和工作安排精确到员工个体。
[0212]
在本技术实施例中,将物联网自动监管终端安装上被监测设备上,通过三相电压电流检测模块读取被监测设备的电流、电压、功率值等设备运行数据,评估设备操作人员的工作状态,并根据rfid读取模块采集到的设备操作人员的打卡信息,统计和输出设备操作人员出勤时的工作时间。准确管理和评估每一个设备操作人员的工作时间以及工作效率,
进而做出公平公正的绩效奖惩制度,提高了设备操作人员的工作积极性和公司工作效益。
[0213]
本技术实施例中的虚拟装置可以是装置,也可以是终端中的部件、集成电路、或芯片。
[0214]
以上所述仅为本发明的实施例而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1