无人设备集群协同航行控制方法、装置及无人设备
本申请属于无人设备控制,尤其涉及无人设备集群协同航行控制方法、装置、无人设备及计算机可读存储介质。
背景技术:
1、近年来,随着对网络化无人系统广泛应用,针对网络化无人系统的协同控制研究与日俱增,其中,协同环航(cooperative circumnavigation,ccn)作为实现无人系统任务的关键技术,它是在保持期望编队构型的情况下,能够引导多辆无人车绕一个静态或动态目标进行圆周运动。网络化无人系统主要包括:航天器(spacecraft),飞艇(airship),无人机(unmanned aerial vehicle(uav)),无人车(unmanned ground vehicle(ugv)),无人船(unmanned surface vehicle(usv),无人潜水器(unmanned underwater vehicle(uuv))等对应的无人系统,网络化无人系统可应用于资源定位、环境勘测以及机器人的安全与监控等。
2、目前,与集群环绕控制问题相比,由于协同环航问题可以将被环绕的中心作为实际的网络无人系统任务的主设备或感兴趣的目标,因此,如何设计控制算法解决实际的协同环航问题成为学者们关注的焦点。因此,围绕协同环航问题也面临较大的技术挑战,如分布式内部通信、高精度制导和多几何编队构型控制。目前针对这些问题已有了一定的研究,然而上述研究方法又有一些不足,例如:研究结果仅限于平面环航,且要求无人设备的环行轨迹是有序的和所有无人设备都必须获得监测物体的全局信息,即监测物体的位置、速度、加速度等,还需要获得无人设备的全局信息,包括所有无人设备的位置、速度、加速度等,这样会增大无人设备的信息负载,导致无人设备的性能降低,并且会给控制系统带来不必要的控制损耗。
技术实现思路
1、本申请实施例提供了无人设备集群协同航行控制方法、装置、无人设备及计算机可读存储介质,可以提升无人设备的性能,避免控制系统不必要的控制损耗问题。
2、第一方面,本申请实施例提供了一种无人设备集群协同航行控制方法,包括:
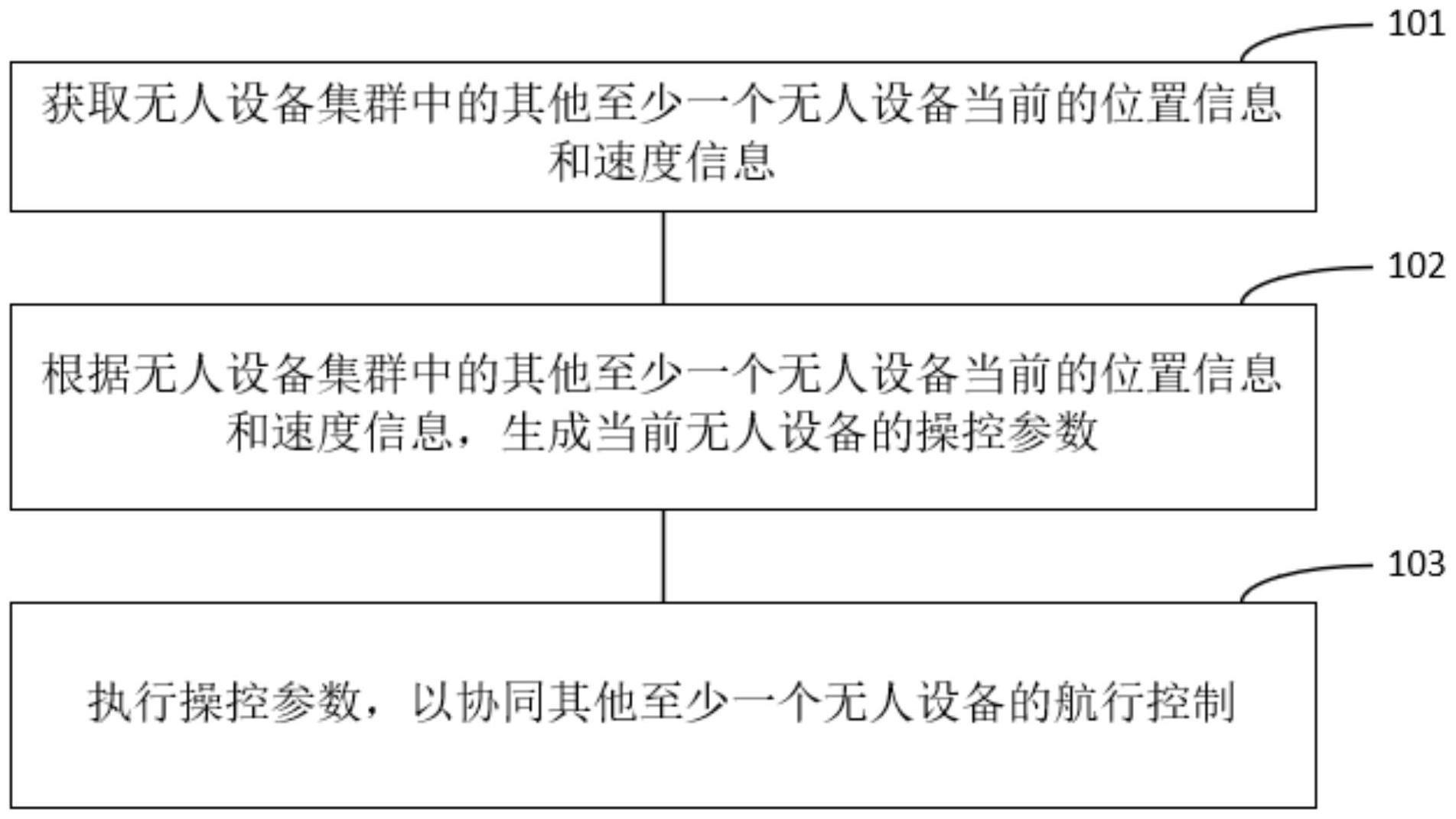
3、在第一方面的一种可能的实现方式中,获取所述无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息;
4、根据所述无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息,生成当前无人设备的操控参数;
5、执行所述操控参数,以协同所述其他至少一个无人设备的航行控制。
6、第二方面,本申请实施例提供了一种无人设备集群协同航行控制装置,包括:
7、信息获取模块,用于获取所述无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息;
8、参数生产模块,用于根据所述无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息,生成当前无人设备的操控参数;
9、控制模块,用于执行所述操控参数,以协同所述其他至少一个无人设备的航行控制。
10、第三方面,本申请实施例提供了一种无人设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面的无人设备集群协同航行控制方法。
11、第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上第一方面所述的无人设备集群协同航行控制方法。
12、第五方面,本申请实施例提供了一种计算机程序产品,当计算机程序产品在无人设备上运行时,使得无人设备执行上述第一方面中任一项所述的无人设备集群协同航行控制方法。
13、可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
14、本申请实施例与现有技术相比存在的有益效果是:可以通过获取无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息;根据无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息,生成当前无人设备的操控参数;执行操控参数,以协同其他至少一个无人设备的航行控制,实现了在获得局部信息的条件下完成环航任务,提高了无人设备的性能,并且减小了不必要的控制损耗。
技术特征:
1.一种无人设备集群协同航行控制方法,其特征在于,包括:
2.如权利要求1所述的无人设备集群协同航行控制方法,其特征在于,所述当前无人设备为领航者,所述方法还包括:
3.如权利要求2所述的无人设备集群协同航行控制方法,其特征在于,所述根据所述监测物体和所述无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息,生成当前无人设备的操控参数,包括:
4.如权利要求3所述的无人设备集群协同航行控制方法,其特征在于,所述控制律为:
5.如权利要求4所述的无人设备集群协同航行控制方法,其特征在于,所述预设的缩放矩阵为:
6.如权利要求1所述的无人设备集群协同航行控制方法,其特征在于,所述当前无人设备为跟随者,所述根据所述无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息,生成当前无人设备的操控参数,包括:
7.如权利要求6所述的无人设备集群协同航行控制方法,其特征在于,所述控制律为:
8.如权利要求1所述的无人设备集群协同航行控制方法,其特征在于,所述控制律的构建方式为:
9.如权利要求8所述的无人设备集群协同航行控制方法,其特征在于,所述仿射拉普拉斯变换矩阵与期望编队构型的联系为:
10.如权利要求8所述的无人设备集群协同航行控制方法,其特征在于,所述领航者动力学模型为:
11.如权利要求8所述的无人设备集群协同航行控制方法,其特征在于,所述完成环航任务的条件为:
12.一种无人设备集群协同航行控制装置,其特征在于,包括:
13.一种无人设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至11任一项所述的方法。
14.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至11任一项所述的方法。
技术总结
本申请适用于无人控制技术领域,提供了无人设备集群协同航行控制方法,包括:获取无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息;根据无人设备集群中的其他至少一个无人设备当前的位置信息和速度信息,生成当前无人设备的操控参数;执行操控参数,以协同其他至少一个无人设备的航行控制,实现了在获得局部信息的条件下完成环航任务,提高了无人设备的性能,并且减小了不必要的控制损耗。
技术研发人员:李东禹,季锐航,喻豪勇
受保护的技术使用者:新加坡国立大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!