一种无人驾驶集装箱运输车辆的路径规划方法
本发明涉及无人配送设备,尤其涉及一种无人驾驶集装箱运输车辆的路径规划方法。
背景技术:
1、无人驾驶的集装箱运输车辆的控制系统目前处于不断演进和发展的阶段。它利用人工智能和自动化技术,使车辆能够在没有人类司机的情况下进行自主行驶和操作,被认为是未来物流行业的重要发展方向。
2、随着国际贸易的增长和物流行业的发展,对于更高效、安全和可靠的运输方式的需求也不断增加,无人驾驶的集装箱运输车辆能够做为这些问题的一种潜在解决方案。同时,能够减少人为驾驶引发的人为错误和事故风险,并提高车辆的运输能力和效率。此外,无人驾驶车辆还可以采用智能路线规划和优化,实现节能环保的目标。
3、无人驾驶的集装箱运输车的路径规划是在使用过程中比较重要的,传统a*算法结合dijkstra算法和最佳优化算法的思路,在保证可以得到最优路径的基础上,同时采用启发式搜索,以提高算法搜索效率。但是传统的a*算法进行路径规划时,并没有考虑过在周围有着不同障碍物发布的情况下,针对仓储环境下a*算法在路径规划中拓展节点速度较慢、搜索效率低、生成路径曲折的问题,如何根据小车周围环境复杂情况设置启发式函数进一步提高算法规划效率,这是急需要要解决的问题。
技术实现思路
1、发明目的:针对现有技术存在的问题,本发明提供一种无人驾驶集装箱运输车辆的路径规划方法,对a*算法中启发函数进行优化,根据周围环境进行自适应改变,提高系统工作效率,生成的路径质量更高。
2、技术方案:本发明提出一种无人驾驶集装箱运输车辆的路径规划方法,包括无人驾驶车辆本体,下简称小车,无人驾驶车辆本体四周设置有超声波传感器,用来感应四周的障碍物密集程度;所述路径规划方法包括如下步骤:
3、步骤1:根据现有的运行环境采用栅格法建立环境模型,将小车所处实际环境抽象化表示成二维地图,在栅格地图中,将小车看作在二维空间移动的质点,黑色栅格表示障碍物空间,白色区域表示自由空间,每个栅格对应唯一的二维坐标,以此建立直观的环境地图,以此做出初始地图;
4、步骤2:通过上述所得的初始地图,利用a*算法获得小车的初始行动路线;
5、步骤3:小车在得到初始的路线时,开始进行运动,把初始的行动路线转化为具体的小车行动指令,小车在得到行动指令后,把具体的行动指令转化为实际的运行步骤;
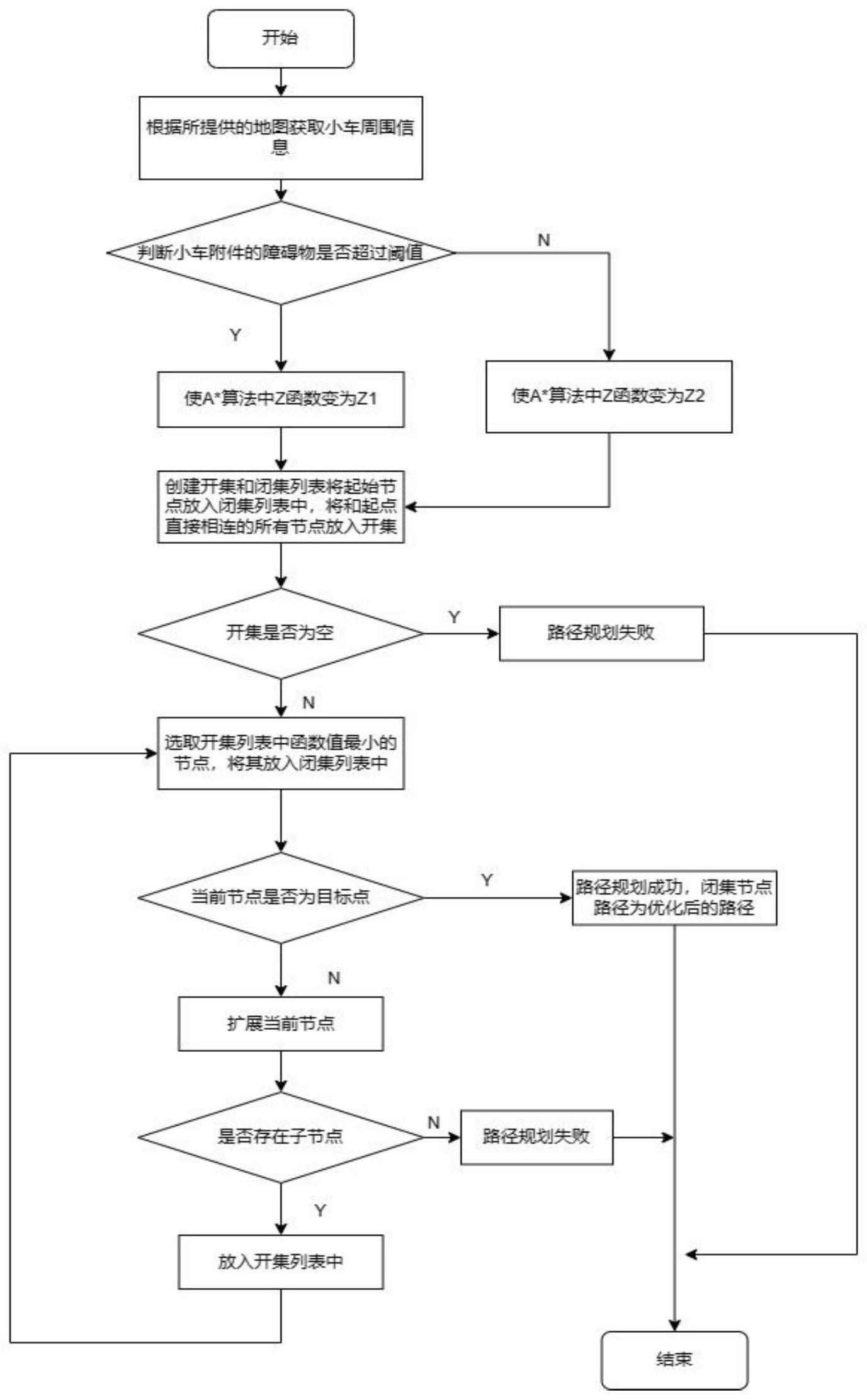
6、步骤4:在小车对于初始线路进行运动时,不停地利用改进a*的路径规划算法更新地图与路径规划;改进a*的路径规划算法假设任意节点均能通过一个代价估计函数计算出节点的代价值,并在已计算出代价值的节点中选出代价值最小的节点作为算法的下一个扩展点,若目标点被选为下一个扩展点,则表示搜索到最优路;所述改进a*的路径规划算法的估价函数为:
7、f(n)=g(n)+z(n)*h(n)
8、其中,g(n)为耗散函数,表示从起始节点node_s到节点n的实际代价;h(n)为启发函数,表示节点n到目标节点node_g的估计代价;f(n)表示从起始节点经由节点n到目标节点的估计代价,z(n)为小车附近障碍物多少有关的函数。
9、进一步地,所述估价函数具体如下:
10、(1)若启发式函数h(n)趋近于0,此时h(n)对f(n)的影响忽略,则f(n)=g(n),a*算法变为dijkstra算法,此时算法能搜索到最优路径,但需扩展大量节点,算法效率低;
11、(2)若耗散函数g(n)趋近于0,此时g(n)对f(n)的影响忽略,则f(n)=h(n),a*算法变为gbfs算法,此时算法不能保证会搜索到最优路径,但搜索节点少,搜索效率高。
12、进一步地,装在小车四周的超声波传感器感应小车四周的障碍物密集程度,四周的超声波传感器在不停地感应,超声波传感器在感应到小车的附件有障碍物时,传递到小车上,通过超声波传感器感应的数量来判断是否超过阈值,当通过传感器检测到小车附近障碍物超过阈值时,表明小车的附近环境复杂,到达目标的最佳路径更重要,需要仔细地寻找出最佳路径;当通过传感器检测到小车附近障碍物未阈值时,表明小车的附近环境简单,应快速到达目的地所在区域更重;
13、当通过传感器检测到小车附近障碍物超过阈值时,表明小车的附近环境复杂,到达目标的最佳路径更重要,z(n)值变小,使f(n)趋向于dijkstra算法;当通过传感器检测到小车附近障碍物未阈值时,表明小车的附近环境简单,应快速到达目的地所在区域更重要,z(n)值变大,使f(n)趋向于gbfs算法。
14、进一步地,当小车的附近环境复杂,到达目标的最佳路径更重要时,z(n)变小,z2(n)∈(0,1],x≥k/2,z2=1/[x-(k/2-1)];
15、当小车的附近环境简单,应快速到达目的地所在区域更重要时,z(n)值变大,z1(n)∈(1,10],x<k/2,z1=10-(18/k)*x;
16、其中,k为传感器探测小车周围方向的数量,x为探测的几个方向中有障碍物方向的数量,z(n)为反应小车附近障碍物多少有关的函数,z(n)有两种情况,分别为z2(n)和z1(n);当小车的附近环境复杂,障碍物比较多,超过阈值时,到达目标的最佳路径更重要时,z(n)=z2(n);当小车的附近环境简单,障碍物比较少时,应快速到达目的地所在区域更重要时,z(n)=z1(n)。
17、进一步地,所述步骤2中获取小车的初始行动路线的具体方法为:
18、初始状态是将起点放入闭集,将和起点直接相连的所有节点放入开集,除非已经将终点放入闭集,或开集为空(此时可能没有可行解),否则重复以下步骤:
19、1)创建地图表示:将环境划分为离散的网格或节点,并为每个节点分配状态;
20、2)初始化起点和终点:确定小车的起点和目标位置,并将其作为a*算法的输入;
21、3)创建开放列表和关闭列表:开放列表用于存储待探索的节点,关闭列表用于存储已经探索过的节点;
22、4)将起点添加到开放列表:将起点节点添加到开放列表中,作为探索的起点;
23、5)进入主循环:循环遍历开放列表,直到找到终点节点或开放列表为空;
24、6)寻找当前最佳节点:从开放列表中选择一个具有最低估计总路径成本的节点作为当前节点;
25、7)探索相邻节点:对于当前节点的相邻节点,计算并更新它们的起点到当前节点的实际路径成本g值和当前节点到终点的估计路径成本h值;
26、8)更新节点和路径:如果相邻节点不在开放列表中,则添加到开放列表,并将当前节点设置为其父节点,如果相邻节点已经在开放列表中,则更新其g值,并根据g值的变化更新父节点;
27、9)判断终点是否达到:如果终点节点出现在开放列表中,表示已找到最佳路径,算法结束。
28、进一步地,所述步骤3中把初始的行动路线转化为具体的小车行动指令具体包括如下步骤:
29、1)定义动作集合:定义小车执行的动作集合,包括前进、后退、左转、右转基本动作;
30、2)确定节点之间的关系:确定节点之间的关系,即第一个节点如何到达第二个节点,第二个节点如何到达第三个节点,以此类推;
31、3)计算节点间的角度和距离:对于每对相邻节点,根据节点的位置信息计算出小车需要转动的角度和移动的距离,通过计算节点之间的欧几里得距离或直线距离来实现;
32、4)将角度和距离转换为行动指令:将角度和距离转换为实际的行动指令,将角度转换为左转或右转的角度值,将距离转换为小车前进或后退的距离值。
33、有益效果:
34、本发明采用了改进a*算法启发函数的方法,对a*算法中启发函数进行优化,根据周围环境进行自适应改变,提高系统工作效率,生成的路径质量更高。设定小车附近障碍物多少有关的函数z(n),通过超声波传感器感应的数量来判断是否超过阈值,当通过传感器检测到小车附近障碍物超过阈值时,表明小车的附近环境复杂,到达目标的最佳路径更重要,需要仔细地寻找出最佳路径;当通过传感器检测到小车附近障碍物未阈值时,表明小车的附近环境简单,应快速到达目的地所在区域更重无人车辆本体能够实现车辆的自由移动、障碍物检测和目标检测,并根据给定的目标位置进行路径规划,使无人配送车辆自主导航,将物品送达到事先指定的目标地点。
- 还没有人留言评论。精彩留言会获得点赞!