一种自动识别冲孔的冷弯成型板在线连续切割系统的制作方法
1.本发明是一种自动识别冲孔的冷弯成型板在线连续切割系统,属于型材切割加工技术领域。
背景技术:
2.在生产冷弯板过程中,为了提高生产效率,常规板需要切断前冲孔,但是有些特殊板不需要冲孔,现有技术中设备生产过程中冲孔和切断同时在一个液压冲控制,冲孔的同时实现切断功能,然后再进入成型,这种方式成型难度大。设备故障率高,而且生产效率非常低,产品合格率也低,浪费量较大,成本较高。且生产常规板和非常规板需要更换机械冲模,耗费时间较长,每次大约半个小时到一个小时的换模时间。
技术实现要素:
3.本发明要解决的技术问题是针对以上不足,提供一种自动识别冲孔的冷弯成型板在线连续切割系统,具有测孔和非测孔两种工作模式,测孔模式通过测孔开关计算孔数量进行检测追踪,非测孔模式通过编码器计算检测追踪实现常规和非常规冷弯成型板的在线连续切割,提高生产效率和智能化程度,提高了产品的合格率,降低企业生产成本,不需要更换机械冲模。
4.为解决以上技术问题,本发明采用以下技术方案:一种自动识别冲孔的冷弯成型板在线连续切割系统,包括电源模块、继电器控制模块、伺服驱动模块、变频驱动模块和plc模块,plc模块连接伺服驱动模块、继电器控制模块和变频驱动模块,电源模块为各模块供电;所述伺服驱动模块包括伺服驱动器t1,伺服驱动器t1的r1脚、s1脚、t1脚连接有触器km8-1一端,接触器km8-1另一端连接有断路器qf1一端,断路器qf1另一端连接有三相电源1l1线、1l2线、1l3线,此部分用于给伺服驱动器t1提供电源,伺服驱动器t1的br脚和+脚连接有制动电阻,伺服驱动器t1的cn1脚连接有伺服驱动器的44芯接线板,伺服驱动器t1的u脚、v脚和w脚连接有伺服电机m1,伺服驱动器t1的cn2脚连接有编码器屏蔽线pg,伺服驱动器t1的ptc脚连接有温度保护机构,伺服驱动器t1用于驱动伺服电机m1运转,并实现其不同速度的控制;所述三相电源1l3线和n线连接有断路器qf1-2的一端,断路器qf1-2的另一端连接有伺服散热风机m2,此部分用于给伺服散热风机m2提供电源;所述伺服驱动器的44芯接线板连接有plc模块和编码器。
5.进一步的,所述继电器控制模块包括中间继电器,中间继电器常开触点一端连接有220v电源正极104线,中间继电器常开触点另一端连接有接触器线圈一端,接触器线圈的的另一端连接有220v电源负极110线,用于伺服驱动器上电、油泵电机接触器主触头、液压站的油泵电机星型启动、液压站的油泵电机三角形启动、液压站散热风机启动和液压站制热电阻丝启动控制;
所述中间继电器常开触点另一端还连接有电磁阀一端,电磁阀另一端连接有24v电源负极200线,用于溢流阀的控制、切刀上升的控制和切刀下降的控制。
6.进一步的,所述变频驱动模块包括变频器,变频器连接有成型电机,用于成型电机正转、反转和低速转动控制。
7.进一步的,所述plc模块包括cpu单元u1,所述cpu单元u1输入端的引脚连接有编码器,用来检测编码器状态,cpu单元u1输入端的引脚连接有接近开关一端,接近开关另一端接24v电源,用于测孔光纤的信号、切刀上限信号、切刀下限信号、伺服原点信号、伺服反向极限信号和伺服正向极限信号检测;cpu单元u1输入端的引脚还连接有压力继电器常开触点一端,压力继电器常开触点一端连接24v电源正极201线,此部分用于压力继电器信号检测;所述cpu单元u1输入端的引脚还连接有旋钮开关一端,钮开关的另一端连接24v电源正极201线,此部分用于急停按钮、自动启动、自动停止、伺服上电、伺服原点回归和油泵电机启停控制;所述cpu单元u1输入端引脚还连接有转换开关一端,转换开关的另一端连接24v电源正极201线,此部分用于手动自动切换、伺服正转反转切换、切刀上升下降切换和1#-3#成型电机正转反转切换控制。
8.进一步的,所述cpu单元u1输入端的i0脚连接有编码器的信号线i0,cpu单元u1输入端的i1脚连接有编码器的信号线i1,cpu单元u1输入端的i4脚连接有接近开关sq4-1的一端,接近开关sq4-1的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于测孔光纤的信号检测,cpu单元u1输入端的i5脚连接有压力继电器常开触点sp4-2的一端,压力继电器常开触点sp4-2的另一端连接24v电源正极201线,此部分用于压力继电器信号检测,cpu单元u1输入端的i6脚连接有接近开关sq4-2的一端,接近开关sq4-2的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于切刀上限信号检测,cpu单元u1输入端的i7脚连接有接近开关sq4-3的一端,接近开关sq4-3的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于切刀下限信号检测,cpu单元u1输入端的i8脚连接有接近开关sq4-4的一端,接近开关sq4-4的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于伺服原点信号检测,cpu单元u1输入端的i9脚连接有接近开关sq4-5的一端,接近开关sq4-5的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于用于伺服反向极限信号检测,cpu单元u1输入端的i10脚连接有接近开关sq4-6的一端,接近开关sq4-6的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于用于伺服正向极限信号检测。
9.进一步的,所述cpu单元u1输入端的i11脚连接有旋钮开关sb5-1的一端,旋钮开关sb5-1的另一端连接24v电源正极201线,此部分用于急停按钮控制,cpu单元u1输入端的i12脚连接有旋钮开关sb5-2的一端,旋钮开关sb5-2的另一端连接24v电源正极201线,此部分用于自动启动控制,cpu单元u1输入端的i13脚连接有旋钮开关sb5-3的一端,旋钮开关sb5-3的另一端连接24v电源正极201线,此部分用于自动停止控制;所述cpu单元u1输入端的i14脚连接有旋钮开关sb5-4的一端,旋钮开关sb5-4的另一端连接24v电源正极201线,此部分用于伺服上电控制,所述cpu单元u1输入端的i15脚连接有旋钮开关sb5-5的一端,旋钮开关sb5-5的另一端连接24v电源正极201线,此部分用于
伺服原点回归控制,所述cpu单元u1输入端的i16脚连接有旋钮开关sb5-6的一端,旋钮开关sb5-6的另一端连接24v电源正极201线,此部分用于油泵电机启停控制;所述cpu单元u1输入端的i17脚连接有转换开关sw5-1的一端,转换开关sw5-1的另一端连接24v电源正极201线,此部分用于手动自动切换控制,所述cpu单元u1输入端的i18脚和i19脚连接有转换开关sw5-2的一端,转换开关sw5-2的另一端连接24v电源正极201线,此部分用于伺服正转反转切换控制,所述cpu单元u1输入端的i20脚和i21脚连接有转换开关sw5-2的一端,转换开关sw5-2的另一端连接24v电源正极201线,此部分用于切刀上升下降切换控制,所述cpu单元u1输入端的i22脚和i23脚连接有转换开关sw5-3的一端,转换开关sw5-3的另一端连接24v电源正极201线,此部分用于1#-3#成型电机正转反转切换控制。
10.进一步的,所述cpu单元u1输出端的引脚连接有中间继电器线圈一端,中间继电器线圈另一端连接24v电源负极200线,此部分用于1#-3#成型电机正转、反转和低速控制、油泵电机主触头、星型和三角形控制、溢流阀控制、切刀上升、下降控制和伺服上电控制。
11.进一步的,所述cpu单元u1输出端的tr0脚和tr3连接有中间继电器ka4-1a线圈的一端和中间继电器ka4-1b线圈的一端,中间继电器ka4-1a线圈的另一端和中间继电器ka4-1b线圈的另一端连接24v电源负极200线,此部分用于1#-3#成型电机正转控制,所述cpu单元u1输出端的的tr1脚连接有中间继电器ka4-2a线圈的一端和中间继电器ka4-2b线圈的一端,中间继电器ka4-2a线圈的另一端和中间继电器ka4-2b线圈的另一端连接24v电源负极200线,此部分用于1#-3#成型电机反转控制,所述cpu单元u1输出端的tr2脚连接有中间继电器ka4-3a线圈的一端和中间继电器ka4-3b线圈的一端,中间继电器ka4-3a线圈的另一端和中间继电器ka4-3b线圈的另一端连接24v电源负极200线,此部分用于1#-3#成型电机低速控制;所述cpu单元u1输出端的q4脚连接有中间继电器ka4-4线圈的一端,中间继电器ka4-4线圈的另一端连接24v电源负极200线,此部分用于油泵电机主触头控制,所述cpu单元u1输出端的q5脚连接有中间继电器ka4-4线圈的一端,中间继电器ka4-5线圈的另一端连接24v电源负极200线,此部分用于油泵电机星型控制,所述cpu单元u1输出端的q6脚连接有中间继电器ka4-6线圈的一端,中间继电器ka4-6线圈的另一端连接24v电源负极200线,此部分用于油泵电机三角形控制,所述cpu单元u1输出端的q7脚连接有中间继电器ka4-7线圈的一端,中间继电器ka4-7线圈的另一端连接24v电源负极200线,此部分用于溢流阀控制,所述cpu单元u1输出端的q8脚连接有中间继电器ka5-1线圈的一端,中间继电器ka5-1线圈的另一端连接24v电源负极200线,此部分用于切刀上升控制,所述cpu单元u1输出端的q9脚连接有中间继电器ka5-2线圈的一端,中间继电器ka5-2线圈的另一端连接24v电源负极200线,此部分用于切刀下降控制,所述cpu单元u1输出端的q10脚连接有中间继电器ka5-3线圈与指示灯el5-1的一端,中间继电器ka5-3线圈与指示灯el5-1的另一端连接24v电源负极200线,此部分用于伺服上电控制。
12.进一步的,所述plc模块还包括plc扩展单元u3,所述plc扩展单元u3的com0脚连接有24v电源负极200线,所述plc扩展单元u3的i0脚连接有i24信号线,此部分用于变频故障信号检测,所述plc扩展单元u3的i2脚连接有常闭开关sb6-1的一端,常闭开关sb6-1的另一端连接24v电源正极201线,此部分用于拉绳开关信号检测,所述plc扩展单元u3的i3脚连接有信号线i27,此部分用于同步剪切信号检测,所述plc扩展单元u3的i4脚连接有信号线
i28,此部分用于伺服原点成功信号检测,所述plc扩展单元u3的i5脚连接有信号线i29,此部分用于伺服故障信号检测,所述plc扩展单元u3的i7脚连接有接近开关sq6-2的一端,开关sq6-2的另一端连接200与24v电源正极201线,此部分用于料仓上限信号检测,所述plc扩展单元u3的i8脚连接有开关sp6-1的一端,开关sp6-1的另一端连接24v电源正极201线,此部分用于液压站压力继电器信号检测。
13.进一步的,所述plc扩展单元u3的输出端连接有中间继电器线圈与信号线,plc扩展单元u3的输出端通过指令实现中间继电器线圈与信号的控制;所述plc扩展单元u3的com1、com2脚连接24v电源负极200线,所述plc扩展单元u3的q1脚连接有信号线q17,此部分用于原点开关的控制,所述plc扩展单元u3的q2脚连接有信号线q18,此部分用于标点开关的控制,所述plc扩展单元u3的q3脚连接有信号线q19,此部分用于切断完成的控制,所述plc扩展单元u3的q4脚连接有信号线q20,此部分用于伺服极限正向的控制,所述plc扩展单元u3的q5脚连接有信号线q21,此部分用于伺服极限反向的控制,所述plc扩展单元u3的q6脚连接有中间继电器ka6-1线圈一端,中间继电器ka6-1线圈另一端连接24v电源正极201线,此部分用于液压站制热控制,所述plc扩展单元u3的q7脚连接有中间继电器ka6-2线圈一端,中间继电器ka6-2线圈另一端连接24v电源正极201线,此部分用于液压站制冷控制。
14.本发明采用以上技术方案,与现有技术相比,具有如下技术效果:1、本发明具有测孔和非测孔两种工作模式,测孔模式通过测孔开关计算孔数量进行检测追踪,非测孔模式通过编码器计算检测追踪实现常规和非常规冷弯成型板的在线连续切割,提高生产效率和智能化程度,提高了产品的合格率,降低企业生产成本,不需要更换机械冲模;2、测孔开关和编码器不需要改动原先设备的布局,占用空间小;3、可以适应有孔和无孔多种产品生产,增加了产品生产种类,减少了设备成本投入;4、本发明利用伺服追踪功能可实现连续不停顿切断,不仅裁切精度高,而且生产效率也高;5、增加了遥控控制功能,方便实现调整轧辊时的随时电动运行。
附图说明
15.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例与方位绘制。
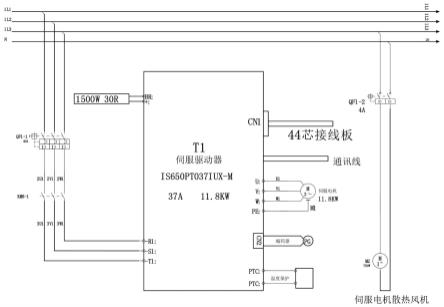
16.图1和图2为系统的伺服驱动模块的电气原理图;图3和图4为系统的电源模块的电气原理图;图5为系统的继电器控制模块的电气原理图;图6至图8为系统的变频驱动模块的电气原理图;图9和图10为系统的plc模块中cpu单元的电气原理图;图11为生产线的控制系统的plc模块中扩展单元的电气原理图;
图12为生产线的控制系统的plc模块中模拟量单元单元的电气原理图。
具体实施方式
17.实施例1,一种自动识别冲孔的冷弯成型板在线连续切割系统,包括电源模块、继电器控制模块、伺服驱动模块、变频驱动模块和plc模块,plc模块连接伺服驱动模块、继电器控制模块和变频驱动模块,电源模块为各模块供电。
18.所述电源模块,用于给液压站的油泵电机、液压站散热风机、液压站制热电阻丝、伺服电机、提供动力电源。
19.如图3所示,所述电源模块包括三相电源1l1线、1l2线、1l3线和n线,三相电源1l1线、1l2线、1l3线连接有断路器qf2-1的一端,断路器qf2-1的另一端连接有接触器km6-1的一端,接触器km6-1的另一端连接有液压站的油泵电机m3的一端和接触器km6-3的一端,接触器km6-3的另一端连接有km6-2的一端和液压站的油泵电机m3的另一端,此部分用于液压站的油泵电机启动控制。
20.所述三相电源1l1线、1l2线、1l3线连接有断路器qf2-2的一端,断路器qf2-2的另一端连接有接触器km6-4的一端,接触器km6-4的另一端连接有液压站散热风机m4,此部分用于液压站散热风机启动。
21.所述三相电源1l1线、1l2线、1l3线连接有断路器qf2-3的一端,断路器qf2-3的另一端连接有接触器km6-5的一端,接触器km6-5的另一端连接有液压站制热电阻丝,此部分用于液压站制热电阻丝启动。
22.如图4所示,所述三相电源1l1线和n线连接有电源开关sa3-1的一端,电源开关sa3-1的另一端连接有103线与220v电源负极110线,103线连接有断路器qf5-2的一端,断路器qf5-2的另一端连接有220v电源正极104线,220v电源正极104线和220v电源负极110线连接有开关电源的l脚和n脚,开关电源的正极连接有203线,203线连接有断路器qf3-1的一端,断路器qf3-1的另一端连接有24v电源正极201线,开关电源的负极连接有24v电源负极200线,24v电源负极200线和24v电源正极201线连接有直流24v指示灯el3-2,此部分用于产生直流24v电源,所述的220v电源正极104线和220v电源负极110线连接有交流220v指示灯el3-1与散热风机。
23.所述继电器控制模块包括中间继电器,中间继电器常开触点一端连接有220v电源正极104线,中间继电器常开触点另一端连接有接触器线圈一端,接触器线圈的的另一端连接有220v电源负极110线,用于伺服驱动器上电、油泵电机接触器主触头、液压站的油泵电机星型启动、液压站的油泵电机三角形启动、液压站散热风机启动和液压站制热电阻丝启动控制。
24.所述中间继电器常开触点另一端还连接有电磁阀一端,电磁阀另一端连接有24v电源负极200线,用于溢流阀的控制、切刀上升的控制和切刀下降的控制。
25.如图5所示,所述继电器控制模块,包括中间继电器ka5-3常开触点,中间继电器ka5-3常开触点一端连接有220v电源正极104线,中间继电器ka5-3常开触点另一端连接有接触器km8-1线圈的一端,接触器km8-1线圈的的另一端连接有220v电源负极110线,此部分用于伺服驱动器上电的控制,所述继电器控制模块,还包括中间继电器ka4-4常开触点,中间继电器ka4-4常开触点一端连接有220v电源正极104线,中间继电器ka4-4常开触点另一
端连接有接触器km6-1线圈的一端,接触器km6-1线圈的另一端连接有220v电源负极110线,此部分用于油泵电机接触器主触头的控制,所述继电器控制模块,还包括中间继电器ka4-5常开触点,中间继电器ka4-5常开触点一端连接有220v电源正极104线,中间继电器ka4-5常开触点另一端连接有接触器km6-3常闭触点的一端,接触器km6-3常闭触点的另一端连接触器km6-2线圈的一端,接触器km6-2线圈的另一端连接有220v电源负极110线,此部分用于液压站的油泵电机星型启动的控制,所述继电器控制模块,还包括中间继电器ka4-6常开触点,中间继电器ka4-6常开触点一端连接有220v电源正极104线,中间继电器ka4-6常开触点另一端连接有接触器km6-2常闭触点的一端,接触器km6-2常闭触点的另一端连接触器km6-3线圈的一端,接触器km6-3线圈的另一端连接有220v电源负极110线,此部分用于液压站的油泵电机三角形启动的控制,所述继电器控制模块,还包括中间继电器ka6-1常开触点,中间继电器ka6-1常开触点一端连接有220v电源正极104线,中间继电器ka6-1常开触点另一端连接有接触器km6-4线圈的一端,接触器km6-4线圈的的另一端连接有220v电源负极110线,此部分用于液压站散热风机启动控制,进行液压站降温,所述继电器控制模块,还包括中间继电器ka6-2常开触点,中间继电器ka6-2常开触点一端连接有220v电源正极104线,中间继电器ka6-2常开触点另一端连接有接触器km6-5线圈的一端,接触器km6-5线圈的另一端连接有220v电源负极110线,此部分用于液压站制热电阻丝启动控制,进行液压站加热。
26.所述继电器控制模块,还包括中间继电器ka4-7常开触点,中间继电器ka4-7常开触点一端连接有24v电源正极201线,中间继电器ka4-7常开触点另一端连接有电磁阀yv9-1一端,电磁阀yv9-1另一端连接有24v电源负极200线,此部分用于溢流阀的控制,所述继电器控制模块,还包括中间继电器ka5-1常开触点,中间继电器ka5-1常开触点一端连接有24v电源正极201线,中间继电器ka5-1常开触点另一端连接有电磁阀yv9-2一端,电磁阀yv9-2另一端连接有24v电源负极200线,此部分用于切刀上升的控制,所述继电器控制模块,还包括中间继电器ka5-2常开触点,中间继电器ka5-2常开触点一端连接有24v电源正极201线,中间继电器ka5-2常开触点另一端连接有电磁阀yv9-3一端,电磁阀yv9-3另一端连接有24v电源负极200线,此部分用于切刀下降的控制。
27.如图1所示,所述伺服驱动模块包括伺服驱动器t1,伺服驱动器t1的r1脚、s1脚、t1脚连接有触器km8-1一端,接触器km8-1另一端连接有断路器qf1一端,断路器qf1另一端连接有三相电源1l1线、1l2线、1l3线,此部分用于给伺服驱动器t1提供电源,伺服驱动器t1的br脚和+脚连接有制动电阻,伺服驱动器t1的cn1脚连接有伺服驱动器的44芯接线板,伺服驱动器t1的u脚、v脚和w脚连接有伺服电机m1,伺服驱动器t1的cn2脚连接有编码器屏蔽线pg,伺服驱动器t1的ptc脚连接有温度保护机构,伺服驱动器t1用于驱动伺服电机m1运转,并实现其不同速度的控制。
28.所述三相电源1l3线和n线连接有断路器qf1-2的一端,断路器qf1-2的另一端连接有伺服散热风机m2,此部分用于给伺服散热风机m2提供电源。如图2所示,所述伺服驱动器的44芯接线板di1脚连接有q20信号线,此部分用于正向极限的控制,伺服驱动器的44芯接线板di2脚连接有q21信号线,此部分用于反向极限的控制,伺服驱动器的44芯接线板di3脚连接有q19信号线,此部分用于切断完成的控制,伺服驱动器的44芯接线板di8脚连接有q18信号线,此部分用于标点开关的控制,伺服驱动器的44芯接线板di9脚连接有q17信号线,此部分用于原点开关的控制,伺服驱动器的44芯接线
板do1、do5、do4脚连接有201信号线,此部分用于控制端的公共线,伺服驱动器的44芯接线板do1脚连接有i27信号线,此部分用于同步剪切信号的控制,伺服驱动器的44芯接线板do5脚连接有i28信号线,此部分用于原点设置成功的控制,伺服驱动器的44芯接线板do4脚连接有i29信号线,此部分用于伺服故障的控制,伺服驱动器的44芯接线板pusl+脚、pusl-脚、sign+脚、、sign-脚、+5v脚、gnd脚连接有编码器。
29.如图6至图8所示,所述变频驱动模块包括变频器,变频器连接有成型电机,用于成型电机正转、反转和低速转动控制。
30.所述变频驱动模块包括变频器vf1,变频器vf1的r脚、s脚和t脚连接有断路器qf3-4一端,断路器qf3-4另一端连接有三相电源1l1线、1l2线和1l3线,变频器vf1的u脚、v脚和w脚连接有1#成型电机m5,变频器vf1的di1脚连接有中间继电器ka4-1a常开触点一端,中间继电器ka4-1a常开触点另一端连接有变频器vf1的com脚,此部分用于控制1#成型电机正转,变频器vf1的di2脚连接有中间继电器ka4-2a常开触点一端,中间继电器ka4-2a常开触点另一端连接有变频器vf1的com脚,此部分用于控制1#成型电机反转,变频器vf1的di3脚连接有中间继电器ka4-3a常开触点一端,中间继电器ka4-3a常开触点另一端连接有变频器vf1的com脚,此部分用于控制1#成型电机低速转动,变频器vf1的+10v脚连接有电位器rp9-1的x2脚,变频器vf1的ai1脚连接有电位器rp9-1的x3脚,变频器vf1的gnd脚连接有电位器rp9-1的x1脚。
31.所述变频驱动模块还包括变频器vf2,变频器vf2的r脚、s脚和t脚连接有断路器qf3-2一端,断路器qf3-2另一端连接有三相电源1l1线、1l2线和1l3线,变频器vf2的u脚、v脚和w脚连接有2#成型电机m6,变频器vf2的di1脚连接有中间继电器ka4-1a常开触点一端,中间继电器ka4-1a常开触点另一端连接有变频器vf2的com脚,此部分用于控制2#成型电机正转,变频器vf2的di2脚连接有中间继电器ka4-2a常开触点一端,中间继电器ka4-2a常开触点另一端连接有变频器vf2的com脚,此部分用于控制2#成型电机反转,变频器vf2的di3脚连接有中间继电器ka4-3a常开触点一端,中间继电器ka4-3a常开触点另一端连接有变频器vf2的com脚,此部分用于控制2#成型电机低速转动,变频器vf2的ai1脚连接有电位器rp9-1的x3脚,变频器vf2的gnd脚连接有电位器rp9-1的x1脚。
32.所述变频驱动模块还包括变频器vf3,变频器vf3的r脚、s脚和t脚连接有断路器qf4-1一端,断路器qf4-1另一端连接有三相电源1l1线、1l2线和1l3线,变频器vf3的u脚、v脚和w脚连接有3#成型电机m7,变频器vf3的di1脚连接有中间继电器ka4-1b常开触点一端,中间继电器ka4-1b常开触点另一端连接有变频器vf3的com脚,此部分用于控制3#成型电机正转,变频器vf3的di2脚连接有中间继电器ka4-2b常开触点一端,中间继电器ka4-2b常开触点另一端连接有变频器vf3的com脚,此部分用于控制3#成型电机反转,变频器vf3的di3脚连接有中间继电器ka4-3b常开触点一端,中间继电器ka4-3b常开触点另一端连接有变频器vf3的com脚,此部分用于控制3#成型电机低速转动,变频器vf3的ai1脚连接有电位器rp9-1的x3脚,变频器vf3的gnd脚连接有电位器rp9-1的x1脚。
33.如图9至图12所示,所述plc模块包括cpu单元u1、plc扩展单元u3、plc模拟量单元u4,plc模块是整个控制系统的核心,控制每个电机的启停,检测故障状态,还控制着指示灯和电磁阀的启停、检测设备的运行状态、采集模拟量的数据。
34.如图9所示,所述cpu单元u1的n脚连接有220v电源负极110线,l脚连接有断路器
qf4-1的一端,断路器qf4-1的另一端连接220v电源正极104线,此部分用于cpu单元u1电源,cpu单元u1通讯串口连接有触摸屏,用于与触摸屏之间的通讯,触摸屏将设备的运行状态可一一显现出来,cpu单元u1的输入端l+脚、m脚连接有+24v线、0v线,此部分用于cpu单元u1的电源,cpu单元u1的com0脚、com1脚和com2脚连接有24v电源负极200线,cpu单元u1的输出端v0+脚、com1和com2脚连接有24v电源正极201线,此部分用于cpu单元u1的各控制脚公共接线。
35.所述cpu单元u1输入端的引脚连接有编码器,用来检测编码器状态,cpu单元u1输入端的引脚连接有接近开关一端,接近开关另一端接24v电源,用于测孔光纤的信号、切刀上限信号、切刀下限信号、伺服原点信号、伺服反向极限信号和伺服正向极限信号检测;cpu单元u1输入端的引脚还连接有压力继电器常开触点一端,压力继电器常开触点一端连接24v电源正极201线,此部分用于压力继电器信号检测。
36.所述cpu单元u1输入端的i0脚连接有编码器的信号线i0,cpu单元u1输入端的i1脚连接有编码器的信号线i1,cpu单元u1输入端的i4脚连接有接近开关sq4-1的一端,接近开关sq4-1的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于测孔光纤的信号检测,cpu单元u1输入端的i5脚连接有压力继电器常开触点sp4-2的一端,压力继电器常开触点sp4-2的另一端连接24v电源正极201线,此部分用于压力继电器信号检测,cpu单元u1输入端的i6脚连接有接近开关sq4-2的一端,接近开关sq4-2的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于切刀上限信号检测,cpu单元u1输入端的i7脚连接有接近开关sq4-3的一端,接近开关sq4-3的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于切刀下限信号检测,cpu单元u1输入端的i8脚连接有接近开关sq4-4的一端,接近开关sq4-4的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于伺服原点信号检测,cpu单元u1输入端的i9脚连接有接近开关sq4-5的一端,接近开关sq4-5的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于用于伺服反向极限信号检测,cpu单元u1输入端的i10脚连接有接近开关sq4-6的一端,接近开关sq4-6的另一端连接有24v电源负极200线和24v电源正极201线,此部分用于用于伺服正向极限信号检测。
37.所述cpu单元u1输入端的引脚还连接有旋钮开关一端,钮开关的另一端连接24v电源正极201线,此部分用于急停按钮、自动启动、自动停止、伺服上电、伺服原点回归和油泵电机启停控制。
38.所述cpu单元u1输入端的i11脚连接有旋钮开关sb5-1的一端,旋钮开关sb5-1的另一端连接24v电源正极201线,此部分用于急停按钮控制,cpu单元u1输入端的i12脚连接有旋钮开关sb5-2的一端,旋钮开关sb5-2的另一端连接24v电源正极201线,此部分用于自动启动控制,cpu单元u1输入端的i13脚连接有旋钮开关sb5-3的一端,旋钮开关sb5-3的另一端连接24v电源正极201线,此部分用于自动停止控制。
39.如图10所示,所述cpu单元u1输入端的i14脚连接有旋钮开关sb5-4的一端,旋钮开关sb5-4的另一端连接24v电源正极201线,此部分用于伺服上电控制,所述cpu单元u1输入端的i15脚连接有旋钮开关sb5-5的一端,旋钮开关sb5-5的另一端连接24v电源正极201线,此部分用于伺服原点回归控制,所述cpu单元u1输入端的i16脚连接有旋钮开关sb5-6的一端,旋钮开关sb5-6的另一端连接24v电源正极201线,此部分用于油泵电机启停控制。
40.所述cpu单元u1输入端引脚还连接有转换开关一端,转换开关的另一端连接24v电源正极201线,此部分用于手动自动切换、伺服正转反转切换、切刀上升下降切换和1#-3#成型电机正转反转切换控制。
41.所述cpu单元u1输入端的i17脚连接有转换开关sw5-1的一端,转换开关sw5-1的另一端连接24v电源正极201线,此部分用于手动自动切换控制,所述cpu单元u1输入端的i18脚和i19脚连接有转换开关sw5-2的一端,转换开关sw5-2的另一端连接24v电源正极201线,此部分用于伺服正转反转切换控制,所述cpu单元u1输入端的i20脚和i21脚连接有转换开关sw5-2的一端,转换开关sw5-2的另一端连接24v电源正极201线,此部分用于切刀上升下降切换控制,所述cpu单元u1输入端的i22脚和i23脚连接有转换开关sw5-3的一端,转换开关sw5-3的另一端连接24v电源正极201线,此部分用于1#-3#成型电机正转反转切换控制。
42.如图9所示,所述cpu单元u1输出端的引脚连接有中间继电器线圈一端,中间继电器线圈另一端连接24v电源负极200线,此部分用于1#-3#成型电机正转、反转和低速控制、油泵电机主触头、星型和三角形控制、溢流阀控制、切刀上升、下降控制和伺服上电控制。
43.所述cpu单元u1输出端的tr0脚和tr3连接有中间继电器ka4-1a线圈的一端和中间继电器ka4-1b线圈的一端,中间继电器ka4-1a线圈的另一端和中间继电器ka4-1b线圈的另一端连接24v电源负极200线,此部分用于1#-3#成型电机正转控制,所述cpu单元u1输出端的的tr1脚连接有中间继电器ka4-2a线圈的一端和中间继电器ka4-2b线圈的一端,中间继电器ka4-2a线圈的另一端和中间继电器ka4-2b线圈的另一端连接24v电源负极200线,此部分用于1#-3#成型电机反转控制,所述cpu单元u1输出端的tr2脚连接有中间继电器ka4-3a线圈的一端和中间继电器ka4-3b线圈的一端,中间继电器ka4-3a线圈的另一端和中间继电器ka4-3b线圈的另一端连接24v电源负极200线,此部分用于1#-3#成型电机低速控制。
44.所述cpu单元u1输出端的q4脚连接有中间继电器ka4-4线圈的一端,中间继电器ka4-4线圈的另一端连接24v电源负极200线,此部分用于油泵电机主触头控制,所述cpu单元u1输出端的q5脚连接有中间继电器ka4-4线圈的一端,中间继电器ka4-5线圈的另一端连接24v电源负极200线,此部分用于油泵电机星型控制,所述cpu单元u1输出端的q6脚连接有中间继电器ka4-6线圈的一端,中间继电器ka4-6线圈的另一端连接24v电源负极200线,此部分用于油泵电机三角形控制,所述cpu单元u1输出端的q7脚连接有中间继电器ka4-7线圈的一端,中间继电器ka4-7线圈的另一端连接24v电源负极200线,此部分用于溢流阀控制,所述cpu单元u1输出端的q8脚连接有中间继电器ka5-1线圈的一端,中间继电器ka5-1线圈的另一端连接24v电源负极200线,此部分用于切刀上升控制,所述cpu单元u1输出端的q9脚连接有中间继电器ka5-2线圈的一端,中间继电器ka5-2线圈的另一端连接24v电源负极200线,此部分用于切刀下降控制,所述cpu单元u1输出端的q10脚连接有中间继电器ka5-3线圈与指示灯el5-1的一端,中间继电器ka5-3线圈与指示灯el5-1的另一端连接24v电源负极200线,此部分用于伺服上电控制。
45.如图10所示,所述cpu单元u1的输出端连接有指示灯和蜂鸣器,cpu单元u1的输出端通过指令实现指示灯和蜂鸣器的控制。
46.所述cpu单元u1的com4、com5、com6脚连接24v电源正极201线,所述cpu单元u1输出端的q11脚连接有指示灯el5-2的一端,指示灯el5-2的另一端连接24v电源负极200线,此部分用于伺服上电显示控制,所述cpu单元u1输出端的q12脚连接有蜂鸣器ha5-1的一端,蜂鸣
器ha5-1的另一端连接24v电源负极200线,此部分用于报警控制,所述cpu单元u1输出端的q13脚连接有指示灯el5-3的一端,指示灯el5-3的另一端连接24v电源负极200线,此部分用于自动启动显示控制,所述cpu单元u1输出端的q14脚连接有指示灯el5-4的一端,指示灯el5-4的另一端连接24v电源负极200线,此部分用于自动停止显示控制。
47.如图11所示,所述plc扩展单元u3的com0脚连接有24v电源负极200线,所述plc扩展单元u3的i0脚连接有i24信号线,此部分用于变频故障信号检测,所述plc扩展单元u3的i2脚连接有常闭开关sb6-1的一端,常闭开关sb6-1的另一端连接24v电源正极201线,此部分用于拉绳开关信号检测,所述plc扩展单元u3的i3脚连接有伺服驱动器的44芯接线板的d01脚,此部分用于伺服同步剪切信号检测,所述plc扩展单元u3的i4脚连接有伺服驱动器的44芯接线板的d05脚,此部分用于伺服原点成功信号检测,所述plc扩展单元u3的i5脚连接有伺服驱动器的44芯接线板的d04脚,此部分用于伺服故障信号检测,所述plc扩展单元u3的i7脚连接有接近开关sq6-2的一端,开关sq6-2的另一端连接200与24v电源正极201线,此部分用于料仓上限信号检测,所述plc扩展单元u3的i8脚连接有开关sp6-1的一端,开关sp6-1的另一端连接24v电源正极201线,此部分用于液压站压力继电器信号检测。
48.如图11所示,所述plc扩展单元u3的输出端连接有中间继电器线圈与信号线,plc扩展单元u3的输出端通过指令实现中间继电器线圈与信号的控制。
49.所述plc扩展单元u3的com1、com2脚连接24v电源负极200线,所述plc扩展单元u3的q1脚连接有伺服驱动器的44芯接线板的di9脚,此部分用于伺服原点开关的控制,所述plc扩展单元u3的q2脚连接有伺服驱动器的44芯接线板的di8脚,此部分用于标点开关的控制,所述plc扩展单元u3的q3脚连接有伺服驱动器的44芯接线板的di3脚,此部分用于切断完成的控制,所述plc扩展单元u3的q4脚连接有伺服驱动器的44芯接线板的di1脚,此部分用于伺服极限正向的控制,所述plc扩展单元u3的q5脚连接有伺服驱动器的44芯接线板的di2脚,此部分用于伺服极限反向的控制,所述plc扩展单元u3的q6脚连接有中间继电器ka6-1线圈一端,中间继电器ka6-1线圈另一端连接24v电源正极201线,此部分用于液压站制热控制,所述plc扩展单元u3的q7脚连接有中间继电器ka6-2线圈一端,中间继电器ka6-2线圈另一端连接24v电源正极201线,此部分用于液压站制冷控制。
50.如图12所示,所述plc模拟量单元u4的输入端连接有生产线速度与液压站温度的信号,用来采集生产线速度与液压站的模拟量信号。
51.所述plc模拟量单元u4的24v脚与0v脚连接有24v电源正极201线与24v电源负极200线,此部分用于plc模拟量单元u4的电源,所述plc模拟量单元u4的ai0v-脚连接有301信号线,所述plc模拟量单元u4的com脚连接有302信号线与24v电源负极200线,此部分用于生产线速度信号的采集,所述plc模拟量单元u4的ai1i-脚与ai1v-连接有ai0+信号线,此部分用于液压站温度信号的采集。
52.设备上电,触摸屏选择测孔切断或者是编码器切断,设定订单长度或者是测孔孔数,启动液压站,按下伺服寻零按钮伺服开始寻找原点,原点寻找完成后,开机前的所有准备工作已经完成,然后将手动自动开关打到自动状态,按下自动启动按钮,相应的自动启动指示灯亮起,成型电机开始运转,当检测到需要的长度或者孔数达到设定值信号后切断系统开始追踪板进行切断,切断完成后返回原点,然后继续等待检测长度或测孔数据达到设定值信号的到来,以此类推反复运行。
53.本发明的描述是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显然的。选择和描述实施例是为了更好的说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1