一种10kV电压电流传感机器人电路控制系统的制作方法
一种10kv电压电流传感机器人电路控制系统
技术领域
1.本发明涉及电路控制技术领域,具体为一种10kv电压电流传感机器人电路控制系统。
背景技术:
2.互感器是电流互感器和电压互感器的统称。能将高电压变成低电压、大电流变成小电流,用于量测或保护系统,其功能主要是将高电压或大电流按比例变换成标准低电压(100v)或标准小电流(5a或 1a,均指额定值),以便实现测量仪表、保护设备及自动控制设备的标准化、小型化,同时互感器还可用来隔开高电压系统,以保证人身和设备的安全;
3.在之前本公司申请的专利名称为一种可带电作业的10kv开启式电压电流传感工作系统,提出了相关技术改进,对于整体的流程与操作,可以得到很好的说明,但是对于其内部的电路,需要分类保护,从而实现整体的电路控制,让整体的操作可以更加便捷与方便。
技术实现要素:
4.本发明提供一种10kv电压电流传感机器人电路控制系统,可以有效解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种10kv电压电流传感机器人电路控制系统,包括主处理器单元、电源管理单元、 typec接口输入与锂电池充电管理单元、伸缩杆电源换向驱动单元、摄像头模组电源、蓝牙模块单元与三路电机控制单元;
6.所述主处理器单元接收处理剩余单元发出的信号,并进行模数转换与换算,对于各个单元的处理发出指令;
7.所述电源管理单元对于整体的机器人进行电源管控;
8.所述typec接口输入与锂电池充电管理单元对于内部的锂电池进行充电管理;
9.所述伸缩杆电源换向驱动单元对于伸缩杆的启停进行控制调节;
10.所述摄像头模组电源给予摄像头电流供给;
11.所述三路电机控制单元对于三路的电机进行控制。
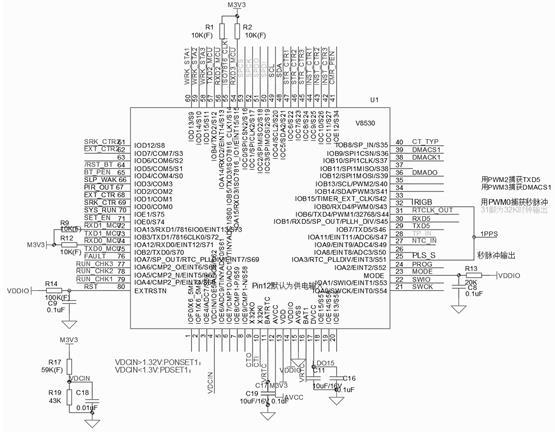
12.根据上述技术方案,所述主处理器单元为v8530芯片,其中芯片的72与74号端口依次串联r9与r10电阻,与电机m3电源相连;
13.所述v8530芯片80号端口通过电阻r14与整流器相连,同时并联电容c9并接地;
14.所述v8530芯片的56与54号端口通过电阻r1和r2与电机m3 电源相连;
15.所述v8530芯片的32与25号端口与秒脉冲输出相连,其中用 pwm捕获xtd5,通用pwm3捕获dmacs1,用pwm0捕获秒脉冲;
16.所述v8530芯片的31号端口与32k时钟输出;
17.所述v8530芯片的23号端口通过电阻r13与整流器相连,同时并联电容c8并接地;
18.所述v8530芯片的4号端口与电源管理单元供电端相连,所述 v8530芯片的9号和
10号端口与ct0与ct1依次相连,所述v8530 芯片的11号端口与电容相连后接地;
19.所述v8530芯片的16号、17号端口相互串联电路c11与c16后接地。
20.根据上述技术方案,所述电源管理单元通过6节 3.7v18650-2500ma电池串并组成,形成2.54mm电池插座,该电池的
ꢀ‑
级与二极管smbj、电容c3、电容c4、电容c7、电阻r10、芯片 a0z1282ci的gnd端依次相连;
21.所述电池的-级与二极管smbj的+端与开关s1相连,同时与开关 k1串联,开关k1与v12bat相连,接着与二极管d1相连,接着与电容c3、电容c4、电阻r6、芯片a0z1282ci的vin端相连;
22.所述芯片a0z1282ci的en端与电阻r6和电阻r10依次并联,并与电容c7串联,电容c7与电池的-级串联;
23.所述芯片a0z1282ci的bst端与lx端通过电容c2串联,与电感串联,电感串联二极管d5后接地,同时芯片a0z1282ci的fb端与电阻r11、电阻r7相连,所述电阻r7与电感与电容c5、电容c6串联,同时电阻r11与电容c5、电容c6串联就接地,所述电容c6与二极管d2相连,二极管d2与电机m3电源端相连。
24.根据上述技术方案,所述typec接口输入与锂电池充电管理单元中typec接口输入为5v,而锂电池充电采用jw3655e芯片为控制芯片,所述jw3655e芯片1号端口与15号端口依次串联有电阻r33和电阻r38后接地,且两者之间串联有电阻r37;
25.所述jw3655e芯片2号、3号和4号端口之间相互并联有电容c27、电容c28、电容c29、电容c31、电容c32、电容c33;
26.所述jw3655e芯片5号端口与电阻r26和电阻r25串联,且电阻 r26与jw3655e芯片4号接口串联;
27.所述jw3655e芯片6号端口与电阻r24、电阻r22和电容c21并联,且电阻r24与vcc相连,所述电阻r22和电容c21相互串联后接地;
28.所述jw3655e芯片7号端口与二极管相连,然后与电阻r23串联后与vcc端相连;
29.所述jw3655e芯片8号端口通过电容c26与jw3655e芯片9号端口相连,所述jw3655e芯片9号、10号、11号端口相互串联,且11 号端口串联有电容c36,9号端口串联有电感l3;
30.所述jw3655e芯片的12号、13号、14号端口相互串联接地,且 13号端口串联电容c40,12号端口串联电阻r40,且并联有电容c41 与电阻r39,同时电阻r39与vchr端相连。
31.根据上述技术方案,所述伸缩杆电源换向驱动单元为伸缩杆的驱动,将其实现正常的升降与停止,通过主处理器单元接收信号进行传输控制。
32.根据上述技术方案,所述摄像头模组电源和蓝牙模块单元为电源传输控制,将其给予所需的正确电压。
33.根据上述技术方案,所述三路电机控制单元接收来自主处理器单元的信号,控制三路电机进行启停。
34.根据上述技术方案,所述摄像头模组通过wifi与app连接并传输视频,用于观测高压电缆的相对位置。
35.根据上述技术方案,所述蓝牙模组与app连接,利用蓝牙通讯 app可以遥控伸缩杆、电机等动作。
36.与现有技术相比,本发明的有益效果:本发明结构科学合理,使用安全方便,将整
体的控制电路实现了模块化与集成化,同时将系统更加的全面化与分类,让整体的操作系统分工操作,防止出现意外或者调动不全,其次可以对于整体的电流互感操作与整体的机器人操作可以更加的便捷,防止出现高电压的涡流与干扰的问题。
附图说明
37.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
38.在附图中:
39.图1是本发明的主处理器单元电路示意图;
40.图2是本发明的电源管理单元电路示意图;
41.图3是本发明的充电管理单元电路示意图;
42.图4是本发明的系统框图。
具体实施方式
43.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
44.实施例:如图1-4所示,本发明提供技术方案,一种10kv电压电流传感机器人电路控制系统,包括主处理器单元、电源管理单元、 typec接口输入与锂电池充电管理单元、伸缩杆电源换向驱动单元、摄像头模组电源、蓝牙模块单元与三路电机控制单元;
45.其中主处理器单元接收处理剩余单元发出的信号,并进行模数转换与换算,对于各个单元的处理发出指令,而电源管理单元对于整体的机器人进行电源管控,typec接口输入与锂电池充电管理单元对于内部的锂电池进行充电管理,伸缩杆电源换向驱动单元对于伸缩杆的启停进行控制调节,摄像头模组电源给予摄像头电流供给,三路电机控制单元对于三路的电机进行控制。
46.主处理器单元为v8530芯片,其中芯片的72与74号端口依次串联r9与r10电阻,与电机m3电源相连,各个引脚中,v8530芯片80 号端口通过电阻r14与整流器相连,同时并联电容c9并接地;
47.v8530芯片的56与54号端口通过电阻r1和r2与电机m3电源相连;
48.v8530芯片的32与25号端口与秒脉冲输出相连,其中用pwm捕获xtd5,通用pwm3捕获dmacs1,用pwm0捕获秒脉冲;
49.v8530芯片的31号端口与32k时钟输出;
50.v8530芯片的23号端口通过电阻r13与整流器相连,同时并联电容c8并接地;
51.v8530芯片的4号端口与电源管理单元供电端相连,v8530芯片的9号和10号端口与ct0与ct1依次相连,v8530芯片的11号端口与电容相连后接地;
52.v8530芯片的16号、17号端口相互串联电路c11与c16后接地。
53.根据上述技术方案,电源管理单元通过6节3.7v18650-2500ma 电池串并组成,形成2.54mm电池插座,该电池的-级与二极管smbj、电容c3、电容c4、电容c7、电阻r10、芯片a0z1282ci的gnd端依次相连;
54.电池的-级与二极管smbj的+端与开关s1相连,同时与开关k1 串联,开关k1与
v12bat相连,接着与二极管d1相连,接着与电容 c3、电容c4、电阻r6、芯片a0z1282ci的vin端相连;
55.芯片a0z1282ci的en端与电阻r6和电阻r10依次并联,并与电容c7串联,电容c7与电池的-级串联;
56.芯片a0z1282ci的bst端与lx端通过电容c2串联,与电感串联,电感串联二极管d5后接地,同时芯片a0z1282ci的fb端与电阻r11、电阻r7相连,电阻r7与电感与电容c5、电容c6串联,同时电阻r11 与电容c5、电容c6串联就接地,电容c6与二极管d2相连,二极管 d2与电机m3电源端相连。
57.根据上述技术方案,typec接口输入与锂电池充电管理单元中 typec接口输入为5v,而锂电池充电采用jw3655e芯片为控制芯片, jw3655e芯片1号端口与15号端口依次串联有电阻r33和电阻r38 后接地,且两者之间串联有电阻r37;
58.jw3655e芯片2号、3号和4号端口之间相互并联有电容c27、电容c28、电容c29、电容c31、电容c32、电容c33;
59.jw3655e芯片5号端口与电阻r26和电阻r25串联,且电阻r26 与jw3655e芯片4号接口串联;
60.jw3655e芯片6号端口与电阻r24、电阻r22和电容c21并联,且电阻r24与vcc相连,电阻r22和电容c21相互串联后接地;
61.jw3655e芯片7号端口与二极管相连,然后与电阻r23串联后与 vcc端相连;
62.jw3655e芯片8号端口通过电容c26与jw3655e芯片9号端口相连,jw3655e芯片9号、10号、11号端口相互串联,且11号端口串联有电容c36,9号端口串联有电感l3;
63.jw3655e芯片的12号、13号、14号端口相互串联接地,且13 号端口串联电容c40,12号端口串联电阻r40,且并联有电容c41与电阻r39,同时电阻r39与vchr端相连。
64.根据上述技术方案,伸缩杆电源换向驱动单元为伸缩杆的驱动,将其实现正常的升降与停止,通过主处理器单元接收信号进行传输控制。
65.根据上述技术方案,摄像头模组电源和蓝牙模块单元为电源传输控制,将其给予所需的正确电压;
66.其中电源传输控制通过电池给予mcu和蓝牙模块为转换电压 3.3v供电,同时给予紧固电机、压线电机、穿刺电机、伸缩杆、批头伸缩、摄像头电源模组供电,且摄像头电源模组供电于摄像头;
67.其中mcu控制紧固电机、压线电机、穿刺电机、伸缩杆、批头伸缩、摄像头电源模组的电路控制,而摄像头通过wifi与手机app相连,手机app与蓝牙模块相连,且蓝牙模块与mcu信号相连。
68.根据上述技术方案,三路电机控制单元接收来自主处理器单元的信号,控制三路电机进行启停。
69.根据上述技术方案,摄像头模组通过wifi与app连接并传输视频,用于观测高压电缆的相对位置。
70.根据上述技术方案,蓝牙模组与app连接,利用蓝牙通讯app可以遥控伸缩杆、电机等动作。
71.与现有技术相比,本发明的有益效果:本发明结构科学合理,使用安全方便,将整
体的控制电路实现了模块化与集成化,同时将系统更加的全面化与分类,让整体的操作系统分工操作,防止出现意外或者调动不全。
72.最后应说明的是:以上所述仅为本发明的优选实例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1