移动机器人防侧滑速度调节与路径跟踪协同控制方法及系统
1.本发明涉及机器人智能控制技术领域,尤其涉及一种移动机器人防侧滑速度调节与路径跟踪协同控制方法及系统。
背景技术:
2.目前,先进的轮式移动机器人防侧滑路径跟踪控制方法包括基于动力学预测模型的控制方法(bai g,liu l,meng y,et al.path tracking of wheeled mobile robots based on dynamic prediction model[j].ieee access,2019,7:39690-39701、cn114003030a)、基于模糊控制的控制方法(bai g,meng y,liu l,et al.anti-sideslip path tracking of wheeled mobile robots based on fuzzy model predictive control[j].electronics letters,2020,56(10):490-493)、基于规则调速的控制方法(cn112925323b)和基于分层控制的控制方法(cn113985868a)。
[0003]
其中,基于动力学预测模型的控制方法存在坐标与误差耦合的问题;基于模糊控制的控制方法较为依赖专家经验,且在速度切换时容易出现抖振;基于规则调速的控制方法需要预先获得参考路径曲率,需要路径规划系统具有相应的功能;基于分层控制的控制方法虽然能够实现无极调速,但是纵向速度仅为相对较优值。
[0004]
因此,上述移动机器人防侧滑路径跟踪控制方法未能解决移动机器人防侧滑速度调节与路径跟踪协同控制的问题。
技术实现要素:
[0005]
本发明实施例所要解决的技术问题在于,提供一种移动机器人防侧滑速度调节与路径跟踪协同控制方法及系统,能解决现有控制方法难以使移动机器人同时具有较好防的侧滑速度调节性能与较好路径跟踪性能的问题。
[0006]
为了解决上述技术问题,本发明实施例提供了一种移动机器人防侧滑速度调节与路径跟踪协同控制方法,所述方法包括以下步骤:
[0007]
获取移动机器人的横摆角速度;
[0008]
根据所述横摆角速度,在预设的优化目标函数中求最优解,得到用以实现所述移动机器人防侧滑的纵向速度,并将所述横摆角速度和所述纵向速度输给所述移动机器人,以实现对所述移动机器人进行防侧滑速度调节与路径跟踪协同控制。
[0009]
其中,所述优化目标函数表示为其中,
[0010]
q1、q2表示权重系数;n
p
表示预测步数;nc表示控制步数;(i|t)表示t时刻的第i个预测值;v
xref
为人工设定的期望速度;v
x
为质心处的纵向速度;vy为质心处的横向速度;ω为质心处的横摆角速度;f
yl
为左侧驱动轮的横向力;f
yr
为右侧驱
动轮的横向力;m为移动机器人质量。
[0011]
其中,所述移动机器人为轮式移动机器人。
[0012]
本发明实施例还提供了一种移动机器人防侧滑速度调节与路径跟踪协同控制系统,包括互连的路径跟踪控制器和防侧滑速度调节控制器;其中,
[0013]
所述路径跟踪控制器,用于获取移动机器人的横摆角速度;
[0014]
所述防侧滑速度调节控制器,用于根据所述横摆角速度,在预设的优化目标函数中求最优解,得到用以实现所述移动机器人防侧滑的纵向速度,并将所述横摆角速度和所述纵向速度输给所述移动机器人,以实现对所述移动机器人进行防侧滑速度调节与路径跟踪协同控制。
[0015]
其中,所述优化目标函数表示为其中,
[0016]
q1、q2表示权重系数;n
p
表示预测步数;nc表示控制步数;(i|t)表示t时刻的第i个预测值;v
xref
为人工设定的期望速度;v
x
为质心处的纵向速度;vy为质心处的横向速度;ω为质心处的横摆角速度;f
yl
为左侧驱动轮的横向力;f
yr
为右侧驱动轮的横向力;m为移动机器人质量。
[0017]
其中,所述移动机器人为轮式移动机器人。
[0018]
实施本发明实施例,具有如下有益效果:
[0019]
本发明基于移动机器人的横摆角速度,求最优解得到用以实现移动机器人防侧滑的纵向速度,并将横摆角速度和纵向速度输给移动机器人,以实现防侧滑速度调节与路径跟踪协同控制,从而解决了现有控制方法难以使移动机器人同时具有较好防的侧滑速度调节性能与较好路径跟踪性能的问题。
附图说明
[0020]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
[0021]
图1为本发明实施例提供的一种移动机器人防侧滑速度调节与路径跟踪协同控制方法的流程图;
[0022]
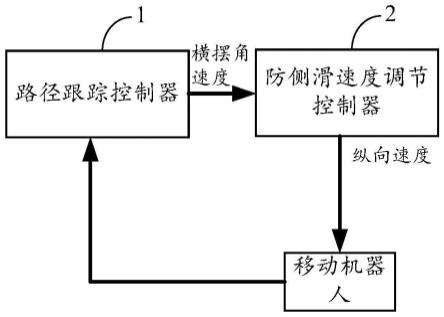
图2为本发明实施例提供的一种移动机器人防侧滑速度调节与路径跟踪协同控制系统的结构示意图。
具体实施方式
[0023]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
[0024]
如图1所示,为本发明实施例中,提出的一种移动机器人防侧滑速度调节与路径跟踪协同控制方法,所述方法包括以下步骤:
[0025]
步骤s1、获取移动机器人的横摆角速度;
[0026]
步骤s2、根据所述横摆角速度,在预设的优化目标函数中求最优解,得到用以实现所述移动机器人防侧滑的纵向速度,并将所述横摆角速度和所述纵向速度输给所述移动机器人,以实现对所述移动机器人进行防侧滑速度调节与路径跟踪协同控制。
[0027]
具体过程为,在步骤s1中,首先是考虑到移动机器人(如轮式移动机器人)存在加速度上限,其纵向速度不可能在一个控制周期内大幅变化,因此可以通过路径跟踪控制器给出路径跟踪控制的控制输入,即横摆角速度信号。特别地,路径跟踪控制器为恒速度的,仅以移动机器人的横摆角速度作为该路径跟踪控制器的控制输入。
[0028]
在步骤s2中,首先,防侧滑速度调节控制器将该步骤s1中的横摆角速度信号作为参数,通过该防侧滑速度调节控制器中基于非线性模型预测控制设计优化目标函数,求解可以实现防侧滑且最接近设定速度的纵向速度;
[0029]
基于非线性模型预测控制的原理为,(1)需要建立移动机器人动力学模型,建立模型的技术可以参考已有文献(如:bai g,liu l,meng y,et al.path tracking of wheeled mobile robots based on dynamic prediction model[j].ieee access,2019,7:39690-39701)。特别地,基于非线性模型预测控制需要从上述模型中进行抽取,仅包含侧向速度这一个状态量的动力学模型,并以该模型为基础,设计非线性预测模型,设计过程也可以参考已有文献(如:bai g,liu l,meng y,et al.path tracking of wheeled mobile robots based on dynamic prediction model[j].ieee access,2019,7:39690-39701)。
[0030]
其中,模型可以表示为:
[0031]vx
为质心处的纵向速度,即输入变量;vy为质心处的横向速度,即状态变量;ω为质心处的横摆角速度,即路径跟踪控制器输出信号;f
yl
为左侧驱动轮的横向力,其为中间变量;f
yr
为右侧驱动轮的横向力,其为中间变量;m为移动机器人质量。应当说明的是,f
yl
和f
yr
可以通过魔术公式等轮胎模型估算,在此不再赘述。
[0032]
(2)基于(1)中的模型构建优化目标函数,该优化目标函数设计如下:
[0033][0034]
其中,q1、q2表示权重系数,n
p
表示预测步数,nc表示控制步数,(i|t)表示t时刻的第i个预测值,v
xref
为人工设定的期望速度。
[0035]
因此,求解该优化目标函数,即可获得最优的纵向速度信号序列,将其中第一个作为实际的控制输入即可实现防侧滑速度调节。
[0036]
最后,将路径跟踪控制器输出的横摆角速度信号与防侧滑速度调节控制器输出的纵向速度信号,输入被控的移动机器人,从而实现防侧滑速度调节与路径跟踪协同控制。
[0037]
如图2所示,为本发明实施例中,提供的一种移动机器人防侧滑速度调节与路径跟踪协同控制系统,包括互连的路径跟踪控制器1和防侧滑速度调节控制器2;其中,
[0038]
所述路径跟踪控制器1,用于获取移动机器人的横摆角速度;
[0039]
所述防侧滑速度调节控制器2,用于根据所述横摆角速度,在预设的优化目标函数中求最优解,得到用以实现所述移动机器人防侧滑的纵向速度,并将所述横摆角速度和所述纵向速度输给所述移动机器人,以实现对所述移动机器人进行防侧滑速度调节与路径跟
踪协同控制。
[0040]
其中,所述优化目标函数表示为其中,
[0041]
q1、q2表示权重系数;n
p
表示预测步数;nc表示控制步数;(i|t)表示t时刻的第i个预测值;v
xref
为人工设定的期望速度;v
x
为质心处的纵向速度;vy为质心处的横向速度;ω为质心处的横摆角速度;f
yl
为左侧驱动轮的横向力;f
yr
为右侧驱动轮的横向力;m为移动机器人质量。
[0042]
其中,所述移动机器人为轮式移动机器人。
[0043]
实施本发明实施例,具有如下有益效果:
[0044]
本发明基于移动机器人的横摆角速度,求最优解得到用以实现移动机器人防侧滑的纵向速度,并将横摆角速度和纵向速度输给移动机器人,以实现防侧滑速度调节与路径跟踪协同控制,从而解决了现有控制方法难以使移动机器人同时具有较好防的侧滑速度调节性能与较好路径跟踪性能的问题。
[0045]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,所述的程序可以存储于一计算机可读取存储介质中,所述的存储介质,如rom/ram、磁盘、光盘等。
[0046]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1