一种割草机器人的作业规划方法、芯片和割草机器人与流程
本发明涉及智能机器人,具体涉及一种割草机器人的作业规划方法、芯片和割草机器人。
背景技术:
1、室外作业的割草机在设置边界时,使用的比较多的是埋线方法,通过在地下埋线来作为外部边界,防止机器走到边界外,这样的操作,比较复杂复杂了,而且需要人来完成大量的工作,线路更改也比较麻烦。虽然用gps(rtk)高精度定位加上imu和轮子的里程融合,可以解决机器定位问题,这样可以形成虚拟边界,安装比较简单,智能化高,可以在多个场景作业。但是gps会受环境影响,同时草地也容易打滑,如果在某段时间内累积误差比较大,这样就会导致割草机器人越过边界。
技术实现思路
1、为解决上述问题,本发明提供了一种割草机器人的作业规划方法、芯片和割草机器人,解决割草机清扫时,容易越出边界的问题。本发明的具体技术方案如下:
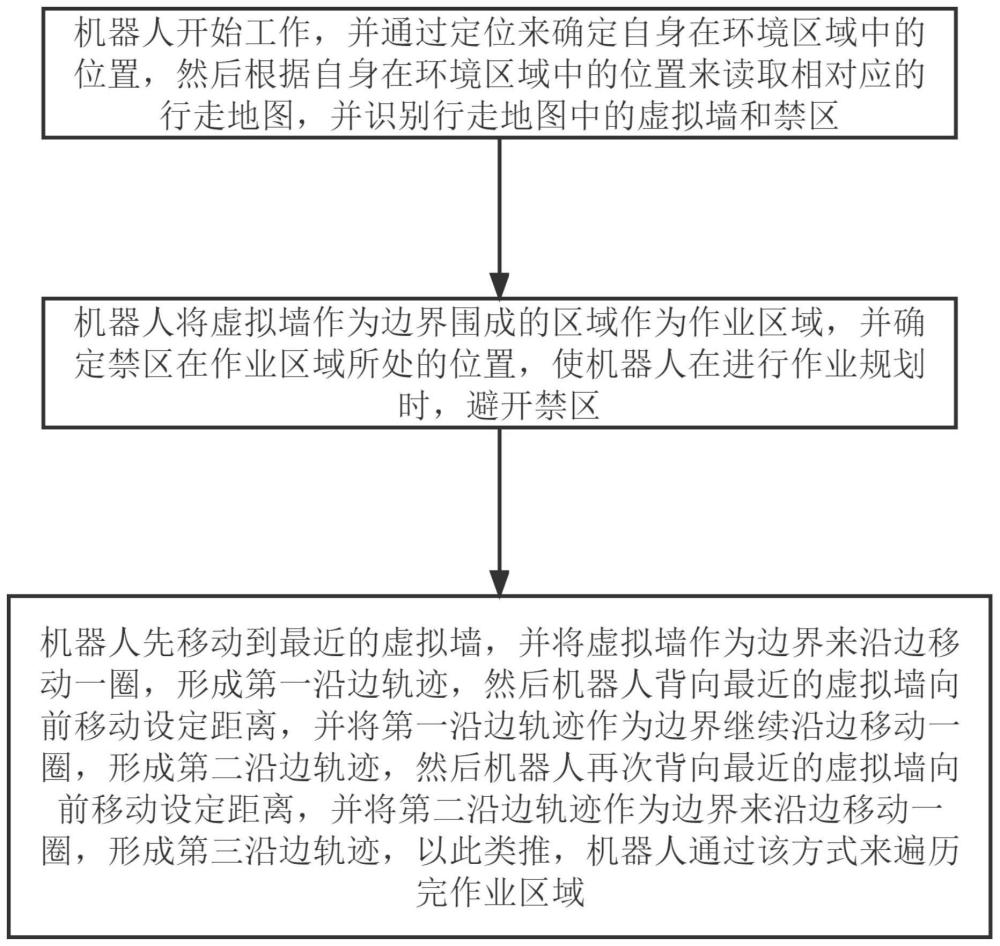
2、一种割草机器人的作业规划方法,该方法包括以下步骤:s1:机器人开始工作,并通过定位来确定自身在环境区域中的位置,然后根据自身在环境区域中的位置来读取相对应的行走地图,并识别行走地图中的虚拟墙和禁区;s2:机器人将虚拟墙作为边界围成的区域作为作业区域,并确定禁区在作业区域所处的位置,使机器人在进行作业规划时,避开禁区;s3:机器人先移动到最近的虚拟墙,并将虚拟墙作为边界来沿边移动一圈,形成第一沿边轨迹,然后机器人背向最近的虚拟墙向前移动设定距离,并将第一沿边轨迹作为边界继续沿边移动一圈,形成第二沿边轨迹,然后机器人再次背向最近的虚拟墙向前移动设定距离,并将第二沿边轨迹作为边界来沿边移动一圈,形成第三沿边轨迹,以此类推,机器人通过该方式来遍历完作业区域。
3、进一步地,机器人在开始工作前,先将环境区域划分为若干行走地图,然后在每个行走地图上划分出虚拟墙和禁区;其中,每个行走地图包含不同的环境区域,使机器人可以根据自身在环境区域中的位置来获取相对应的行走地图。
4、进一步地,机器人在行走地图上划分出虚拟墙,包括以下步骤:机器人接收虚拟墙控制命令,根据虚拟墙控制命令在行走地图上进行行走,并在行走过程中,基于自身在当前行走地图上的位置,在当前行走地图上记录第一标识,然后在行走完成后,将第一标识转化为虚拟墙。
5、进一步地,机器人在行走地图上划分出禁区,包括以下步骤:机器人接收禁区控制命令,根据禁区控制命令在虚拟墙围成的区域中进行行走,并在行走过程中,基于自身在当前行走地图上的位置,在当前行走地图上记录第二标识,然后在行走完成后,将第二标识标记的区域划分为禁区;机器人根据接收的禁区控制命令,在虚拟墙中逐一划分出禁区。
6、进一步地,步骤s1,机器人通过rtk定位来确定自身所处位置。
7、进一步地,步骤s1中,机器人在读取行走地图后,将行走地图发送到app端,使app端对行走地图的虚拟墙和禁区进行修改,并接收修改后的行走地图。
8、进一步地,步骤s1中,机器人根据自身在环境区域中的位置来读取相对应的行走地图后,机器人将自身在环境区域中的位置转换为行走地图中的栅格坐标,其中,所述行走地图为栅格地图。
9、进一步地,步骤s3中,所述设定距离为半个机身长度或一个机身长度。
10、一种芯片,该芯片用于存储程序,该程序被配置为执行上述的割草机器人的作业规划方法。
11、一种割草机器人,装配有主控芯片,所述主控芯片为上述的芯片。
12、与现有的技术相比,本发明的有益效果在于:本申请的技术方案通过自身所处的位置来获取相应的行走地图,使机器人可以快速进入工作状态,提高工作效率;机器人通过对虚拟墙沿边和上一移动轨迹沿边的方式进行工作,从外往里进行工作,可以防止机器人在工作时越界。
技术特征:
1.一种割草机器人的作业规划方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的割草机器人的作业规划方法,其特征在于,机器人在开始工作前,先将环境区域划分为若干行走地图,然后在每个行走地图上划分出虚拟墙和禁区;其中,每个行走地图包含不同的环境区域,使机器人可以根据自身在环境区域中的位置来获取相对应的行走地图。
3.根据权利要求2所述的割草机器人的作业规划方法,其特征在于,机器人在行走地图上划分出虚拟墙,包括以下步骤:
4.根据权利要求3所述的割草机器人的作业规划方法,其特征在于,机器人在行走地图上划分出禁区,包括以下步骤:
5.根据权利要求1所述的割草机器人的作业规划方法,其特征在于,步骤s1,机器人通过rtk定位来确定自身所处位置。
6.根据权利要求1所述的割草机器人的作业规划方法,其特征在于,步骤s1中,机器人在读取行走地图后,将行走地图发送到app端,使app端对行走地图的虚拟墙和禁区进行修改,并接收修改后的行走地图。
7.根据权利要求1所述的割草机器人的作业规划方法,其特征在于,步骤s1中,机器人根据自身在环境区域中的位置来读取相对应的行走地图后,机器人将自身在环境区域中的位置转换为行走地图中的栅格坐标,其中,所述行走地图为栅格地图。
8.根据权利要求1所述的割草机器人的作业规划方法,其特征在于,步骤s3中,所述设定距离为半个机身长度或一个机身长度。
9.一种芯片,该芯片用于存储程序,其特征在于,该程序被配置为执行权利要求1至8任一项所述的割草机器人的作业规划方法。
10.一种割草机器人,装配有主控芯片,其特征在于,所述主控芯片为权利要求9所述的芯片。
技术总结
本发明公开了一种割草机器人的作业规划方法、芯片和割草机器人,包括:S1:机器人开始工作,并通过定位来确定自身在环境区域中的位置,然后根据自身在环境区域中的位置来读取相对应的行走地图;S2:机器人将虚拟墙作为边界围成的区域作为作业区域,并确定禁区在作业区域所处的位置;S3:机器人将虚拟墙作为边界来沿边移动一圈,然后机器人背向虚拟墙来移动设定距离,并将移动轨迹作为边界来沿边移动一圈,然后机器人再次背向虚拟墙来移动设定距离,并将移动轨迹作为边界来沿边移动一圈,以此类推,机器人通过该方式来遍历完作业区域。解决割草机清扫时,容易越出边界的问题。
技术研发人员:李永勇
受保护的技术使用者:珠海一微半导体股份有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!