姿态控制方法、装置、机器人、存储介质和程序产品与流程
本公开涉及机器人控制,尤其涉及一种姿态控制方法、装置、机器人、存储介质和程序产品。
背景技术:
1、近年来,随着社会和科技进步,机器人技术已经广泛应用于生活中的方方面面,但是人们对机器人的功能需求也在不断提高。足式机器人因其优异的运动性能和仿生特性,成为机器人技术中一大研究热点。
2、足式机器人可以利用腿部冗余的自由度来调节腿的位置与姿态保持自身平衡,从而适应复杂地形。对于足式机器人而言,除了适应复杂地形外,人们还希望足式机器人能够在复杂定性下完成某些特定任务,例如,使用足式机器人躯干上安装的视觉传感器观察地形,这需要足式机器人能够通过协调腿部的自由度来控制机器人躯干的姿态,以使得传感器能够观测到更加全面的信息。
3、目前,足式机器人姿态控制方式中,足式机器人与其接触面之间容易发生打滑现象,影响足式机器人的正常行进。
技术实现思路
1、本公开提供一种姿态控制方法、装置、机器人、存储介质和程序产品,以至少解决现有足式机器人容易发生打滑现象,而影响足式机器人正常行进的问题。
2、本公开的技术方案如下:
3、本公开提供一种姿态控制方法,应用于足式机器人,包括:
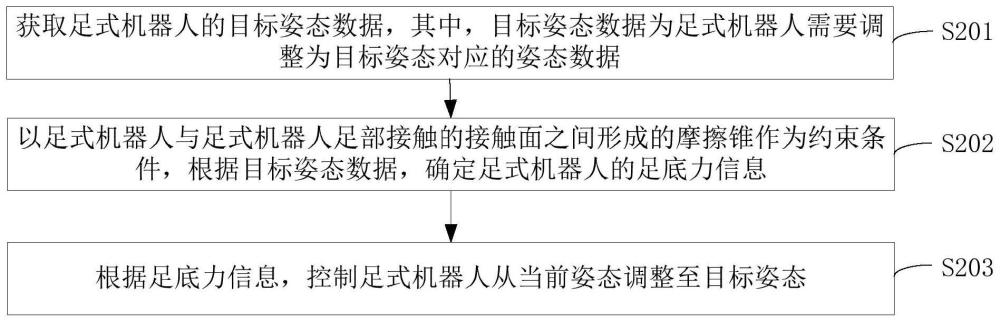
4、获取所述足式机器人的目标姿态数据,其中,目标姿态数据为所述足式机器人需要调整为目标姿态对应的姿态数据;
5、以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据所述目标姿态数据,确定所述足式机器人的足底力信息;
6、根据所述足底力信息,控制所述足式机器人从当前姿态调整至所述目标姿态。
7、可选地,所述足底力信息包括足底力和足底力变化量,所述以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据所述目标姿态数据,确定所述足式机器人的足底力信息,包括:
8、以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据所述目标姿态数据,确定所述足式机器人的所述足底力;
9、根据所述目标姿态数据和实际姿态数据的差异,确定所述足底力变化量。
10、可选地,所述以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据所述目标姿态数据,确定所述足式机器人的所述足底力,包括:
11、根据所述目标姿态数据,构建动力学模型;
12、以足底力最小为优化目标,结合所述动力学模型和摩擦锥约束条件,构建二次型优化关系;
13、根据所述二次型优化关系,确定所述足式机器人的足底力。
14、可选地,所述差异包括质心位置误差、质心速度误差、躯干姿态误差以及躯干角速度误差,所述根据所述目标姿态数据和实际姿态数据的差异,确定所述足底力变化量,包括:
15、根据质心位置误差、质心速度误差、躯干姿态误差、躯干角速度误差和初始足底力变化量,对动力学模型对线性化处理,得到线性化动力学模型;
16、以足底力变化量最小为目标,结合所述线性化动力学模型,构建线性二次型调节关系;
17、根据二次型调节关系,确定足底力变化量。
18、可选地,所述根据所述足底力信息,控制所述足式机器人从当前姿态调整至所述目标姿态,包括:
19、以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据线性化动力学模型,对所述足底力信息进行优化,得到优化后的足底力信息;
20、根据所述优化后的足底力信息,确定所述足式机器人的各关节的关节力矩;
21、根据所述关节力矩,控制所述足式机器人从当前姿态调整至所述目标姿态。
22、可选地,所述足底力信息包括足底力和足底力变化量,所述以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据线性化动力学模型,对所述足底力信息进行优化,得到优化后的足底力信息,包括:
23、以当前控制周期的足底力变化量和上一控制周期的足底力变化量为目标,以所述摩擦锥约束条件和线性化动力学模型为约束,对所述足底力变化量进行优化,得到优化后的足底力变化量;
24、根据所述优化后的足底力变化量和所述足底力,得到所述优化后的足底力信息。
25、可选地,所述根据所述优化后的足底力信息,确定所述足式机器人的各关节的关节力矩,包括:
26、根据所述优化后的足底力信息和重力矩,确定所述足式机器人的各关节的关节力矩。
27、本公开还提供一种机器人姿态控制装置,包括:
28、获取模块,用于获取足式机器人的目标姿态数据,其中,目标姿态数据为所述足式机器人需要调整为目标姿态对应的姿态数据;
29、确定模块,用于以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据所述目标姿态数据,确定所述足式机器人的足底力信息;
30、控制模块,用于根据所述足底力信息,控制所述足式机器人从当前姿态调整至所述目标姿态。
31、可选地,所述足底力信息包括足底力和足底力变化量,所述确定模块包括第一确定子模块和第二确定子模块;
32、所述第一确定子模块,用于以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据所述目标姿态数据,确定所述足式机器人的所述足底力;
33、所述第二确定子模块,用于根据所述目标姿态数据和实际姿态数据的差异,确定所述足底力变化量。
34、可选地,所述第一确定子模块在以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据所述目标姿态数据,确定所述足式机器人的所述足底力时,用于:
35、根据所述目标姿态数据,构建动力学模型;
36、以足底力最小为优化目标,结合所述动力学模型和摩擦锥约束条件,构建二次型优化关系;
37、根据所述二次型优化关系,确定所述足式机器人的足底力。
38、可选地,所述差异包括质心位置误差、质心速度误差、躯干姿态误差以及躯干角速度误差,所述第二确定子模块在根据所述目标姿态数据和实际姿态数据的差异,确定所述足底力变化量时,用于:
39、根据质心位置误差、质心速度误差、躯干姿态误差、躯干角速度误差和初始足底力变化量,对动力学模型对线性化处理,得到线性化动力学模型;
40、以足底力变化量最小为目标,结合所述线性化动力学模型,构建线性二次型调节关系;
41、根据所述线性二次型调节关系,确定足底力变化量。
42、可选地,所述控制模块包括优化子模块,第三确定子模块和控制子模块;
43、所述优化子模块,用于以所述足式机器人与所述足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据线性化动力学模型,对所述足底力信息进行优化,得到优化后的足底力信息;
44、所述第三确定子模块,用于根据所述优化后的足底力信息,确定所述足式机器人的各关节的关节力矩;
45、所述控制子模块,用于根据所述关节力矩,控制所述足式机器人从当前姿态调整至所述目标姿态。
46、可选地,所述足底力信息包括足底力和足底力变化量,所述优化子模块在根据所述足式机器人与所述足式机器人的接触面的摩擦情况和线性化动力学模型,对所述足底力信息进行优化,得到优化后的足底力信息时,用于:
47、以当前控制周期的足底力变化量和上一控制周期的足底力变化量为目标,以所述摩擦锥约束条件和线性化动力学模型为约束,对所述足底力变化量进行优化,得到优化后的足底力变化量;
48、根据所述优化后的足底力变化量和所述足底力,得到所述优化后的足底力信息。
49、可选地,所述第三确定子模块在根据所述优化后的足底力信息,确定所述足式机器人的各关节的关节力矩时,用于:
50、根据所述优化后的足底力信息和重力矩,确定所述足式机器人的各关节的关节力矩。
51、本公开还提供一种机器人,包括:
52、处理器;
53、用于存储所述处理器可执行指令的存储器;
54、其中,所述处理器被配置为执行所述指令,以实现如上述的方法中的各步骤。
55、本公开还提供一种计算机可读存储介质,其特征在于,所述计算机指令用于使计算机执行上述的方法中的各步骤。
56、本公开还提供一种计算机程序产品,包括计算机程序/指令,所述计算机程序/指令被处理器执行时实现上述的方法中的各步骤。
57、本公开的实施例提供的技术方案至少带来以下有益效果:
58、在本技术的一些实施例中,获取足式机器人的目标姿态数据,其中,目标姿态数据为足式机器人需要调整为目标姿态对应的姿态数据;以足式机器人与足式机器人足部接触的接触面之间形成的摩擦锥作为约束条件,根据目标姿态数据,确定足式机器人的足底力信息;引入摩擦锥约束条件,减少足式机器人的打滑现象,进而根据足底力信息,平稳控制足式机器人从当前姿态调整至目标姿态。
59、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!