一种无人帆船的路径规划方法与流程
1.本发明属于帆船智能控制技术领域,特别是涉及一种无人帆船的路径规划方法,能够在开敞水域下根据当前帆船的位置、风向、终点位置和障碍物信息规划出最佳航线的方法。
背景技术:
2.在21世纪,伴随着能源危机的进一步凸显,海洋所蕴藏的巨大资源以及它在政治、军事上的重要地位己经受到世界各国的广泛关注。随着科学技术的发展,近年来人们日益把目光投向作为海洋资源开发和海洋环境监测工具的各种海洋机器人的研发。而目前针对海洋资源勘探和环境监测应用研制的海洋机器人主要集中于水下机器人、水面机动艇(内燃机动力居多)和海上定点浮标等。很多水下机器人、水面机动艇由于受到所携带燃料和动力电池的限制,不能持续的作业和巡航,并且相应的建造和使用费用过大。至于海上定点浮标,若需实现对大区域海洋环境的监测,需要在指定海域投放大量浮标,不仅投资巨大,而且浮标的适应能力差、定点困难、单个浮标的监测范围小,尤其是在环境恶劣的海区(如存在暗礁、大风浪等),浮标的投放与回收也是个棘手的问题。在这样的区域,载人监测船也很难靠近进行实地勘测。为了克服定点浮标和载人监测船的缺陷,减少对监测系统的投入,扩大探测范围,提高系统的智能化水平,提高监测站的性能和探测投资的经济效益,实现智能化、自动化、低成本的大区域海洋水面环境资源的可靠监测,有必要开发一种智能化的自主游动式持续巡航的海洋环境资源探测机器人。因此,基于智能风帆的自动化帆船的出现将代表了一项迅速兴起的新兴技术,并将在上述领域发挥重要作用。
3.当前的路径规划算法只考虑位置信息及障碍物信息进行路径规划,未将影响帆船航行的风向信息作为路径规划的一个重要考虑因素。
技术实现要素:
4.本发明的目的在于提供一种无人帆船的路径规划方法,通过查找整个航行区域内的静态障碍物信息,将障碍物信息绘制该区域的灰度图像,并叠加风向信息生成代价地图矩阵,使用a*算法进行最优路径点计算,解决了现有的帆船只考虑位置信息及障碍物信息进行路径规划的问题。
5.为解决上述技术问题,本发明是通过以下技术方案实现的:
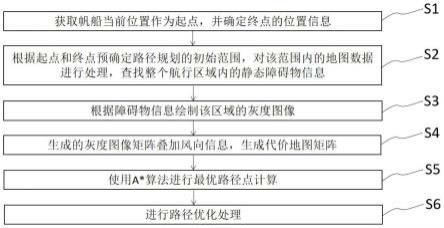
6.本发明为一种无人帆船的路径规划方法,包括如下步骤:
7.步骤s1:获取帆船当前位置作为起点,并确定终点的位置信息;
8.步骤s2:根据起点和终点预确定路径规划的初始范围,对该范围内的地图数据进行处理,查找整个航行区域内的静态障碍物信息;
9.步骤s3:根据障碍物信息绘制该区域的灰度图像;
10.步骤s4:生成的灰度图像矩阵叠加风向信息,生成代价地图矩阵;
11.步骤s5:使用a*算法进行最优路径点计算;
12.步骤s6:进行路径优化处理。
13.作为一种优选的技术方案,所述步骤s3中,绘制该区域的灰度图像时,灰度值大于50的区域视为无障碍物,该区域标记为0;灰度值小于等于50的区域视为障碍物区域,该区域标记为1。
14.作为一种优选的技术方案,所述步骤s5中,a*算法计算最优路径点的步骤如下:
15.步骤s51:初始化open_set和close_set列表;
16.步骤s52:将起点加入open_set中,并设置优先级为0;
17.步骤s53:如果open_set不为空,则从open_set中选取优先级最高的节点n;
18.步骤s54:判断节点n是否为终点;
19.若节点n为终点,则从终点开始逐步追踪parent节点,一直达到起点;返回找到的结果路径,算法结束;
20.若节点n不是终点,则将节点n从open_set中删除,并加入close_set中,遍历节点n所有的邻近节点。
21.作为一种优选的技术方案,所述步骤s54中,在遍历所有节点n的邻近节点时;
22.若邻近节点m在close_set中,则跳过,选取下一个邻近节点;
23.若邻近节点m也不在open_set中,则设置节点m的parent为节点n,计算节点m的优先级,将节点m加入open_set中。
24.作为一种优选的技术方案,所述步骤s6中,进行路径优化处理包括去掉相邻的共线的点和去掉多余的拐弯的点;
25.当去掉相邻的共线的点时,遍历产生的路径点,计算相邻的两个向量是否同方向,若相同则去掉中间点,若不同则保留;
26.当去掉多余的拐弯的点时,遍历产生的路径点,找出两个点做一条直线,若该直线不穿过任何障碍物,则该两点中间的所有点都舍弃,否则保留。
27.本发明具有以下有益效果:
28.本发明通过查找整个航行区域内的静态障碍物信息,将障碍物信息绘制该区域的灰度图像,并叠加风向信息生成代价地图矩阵,使用a*算法进行最优路径点计算没,帆船的行进方向可以最大程度的在适合航行的相对风向角之内,路径避开碍航物体,提高帆船航行精准度。
29.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
30.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
31.图1为本发明的一种无人帆船的路径规划方法流程图。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
33.请参阅图1所示,本发明为一种无人帆船的路径规划方法,包括如下步骤:
34.步骤s1:获取帆船当前位置作为起点,并确定终点的位置信息,帆船本体内设置有gps定位装置,终点位置为手动点选地图选择;
35.步骤s2:根据起点和终点预确定路径规划的初始范围,对该范围内的地图数据进行处理,查找整个航行区域内的静态障碍物信息;
36.步骤s3:根据障碍物信息绘制该区域的灰度图像,绘制该区域的灰度图像时,灰度值大于50的区域视为无障碍物,该区域标记为0;灰度值小于等于50的区域视为障碍物区域,该区域标记为1;
37.步骤s4:生成的灰度图像矩阵叠加风向信息,生成代价地图矩阵;
38.步骤s5:使用a*算法进行最优路径点计算;a*(a-star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的有效算法。算法中的距离估算值与实际值越接近,最终搜索速度越快。
39.具体采用价值函数进行寻路,代价值计算函数为f=g+h+w,其中:
40.f是节点n的综合优先级。当我们选择下一个要遍历的节点时,我们总会选取综合优先级最高(值最小)的节点;
41.g是节点n距离起点的代价,从起点移动到节点n的移动代价,沿着到达该节点而生成的路径。约定直行移动一次代价是10,对角线的移动代价为14。(实际对角移动距离是2的平方根,或者是近似的1.414倍的横向或纵向移动代价);
42.h是节点n距离终点的预计代价,h=(两个点横坐标距离+两个点纵坐标距离)乘以10;
43.w是节点n所在点的预计风向代价值。w值的计算方法如下:
44.①
首先计算从起点移动到节点n的方向α;
45.②
计算
①
中α与节点n所在位置的风向的夹角β
46.③
当β∈[-45
°
,45
°
]时(顶风),w=1000;
[0047]
当β∈(-135
°
,-45
°
)∪(45
°
,135
°
)时(左右舷受风),w=0;
[0048]
当β∈[-180
°
,-135
°
]∪[135
°
,180
°
]时(顺风),w=10。
[0049]
步骤s5中,a*算法计算最优路径点的步骤如下:
[0050]
步骤s51:初始化open_set和close_set列表;
[0051]
步骤s52:将起点加入open_set中,并设置优先级为0;
[0052]
步骤s53:如果open_set不为空,则从open_set中选取优先级最高的节点n;
[0053]
步骤s54:判断节点n是否为终点;
[0054]
若节点n为终点,则从终点开始逐步追踪parent节点,一直达到起点;返回找到的结果路径,算法结束;
[0055]
若节点n不是终点,则将节点n从open_set中删除,并加入close_set中,遍历节点n所有的邻近节点。
[0056]
步骤s54中,在遍历所有节点n的邻近节点时;
[0057]
若邻近节点m在close_set中,则跳过,选取下一个邻近节点;
[0058]
若邻近节点m也不在open_set中,则设置节点m的parent为节点n,计算节点m的优先级,将节点m加入open_set中。
[0059]
步骤s6:进行路径优化处理。
[0060]
步骤s6中,进行路径优化处理包括去掉相邻的共线的点和去掉多余的拐弯的点;
[0061]
当去掉相邻的共线的点时,遍历产生的路径点,计算相邻的两个向量是否同方向,若相同则去掉中间点,若不同则保留;
[0062]
当去掉多余的拐弯的点时,遍历产生的路径点,找出两个点做一条直线,若该直线不穿过任何障碍物,则该两点中间的所有点都舍弃,否则保留。
[0063]
值得注意的是,上述系统实施例中,所包括的各个单元只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
[0064]
另外,本领域普通技术人员可以理解实现上述各实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,相应的程序可以存储于一计算机可读取存储介质中。
[0065]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1