多航天器系统及其抗干扰控制方法、装置和存储介质与流程
1.本发明涉及航天技术领域,具体是涉及一种多航天器系统的抗干扰控制方法、装置、多航天器系统和存储介质,特别是涉及一种离散时间下的多航天器博弈抗干扰控制方法、装置、多航天器系统和存储介质。
背景技术:
2.经过几十年的研究,博弈论已经在众多领域中得到了广泛的研究和应用,例如社会学与经济学、航空航天、通信工程、控制工程等。同样的博弈论也为多航天器工程问题提供了有效的解决工具。在多航天器博弈系统中,每个航天器都是一个自私的决策者,他们会尽力优化自己的成本函数,而每个航天器的成本函数之间又存在着耦合关系。已有的应用包括城市交通协调控制、无线通信、智能电网、多智能体的控制问题等。在这类问题中,通常目的都是设计有效的博弈控制策略使多航天器博弈系统能够达到纳什均衡状态,在这种状态下,多航天器博弈系统中的任何智能体都没有单方面改变状态的动机。大多数的研究都是在个体不具备动力学或者没有干扰的情况下。
3.而在实际工程问题中,几乎所有的多航天器博弈系统都会受到由模型不确定性、传输波动、环境噪声或其他原因引起的某种干扰。然而,对于在未知扰动存在时的多智能体博弈纳什均衡寻求问题的研究相对较少。显然直接忽略扰动带来的影响是不合理的,因为存在于博弈动力学的扰动会对博弈的结果造成影响。
4.因此,亟需开发一种多航天器系统的抗干扰控制方法、装置、多航天器系统和存储介质,以解决对多航天器博弈系统而言存在于博弈动力学的扰动会对博弈的结果造成影响的问题,从而能够使多航天器博弈系统在存在未知扰动的情况下仍能达到唯一的纳什均衡状态,从而提升多航天器博弈系统的抗干扰能力和控制可靠性。
技术实现要素:
5.本发明的目的是提供一种多航天器系统的抗干扰控制方法、装置、多航天器系统和存储介质,以解决对多航天器博弈系统而言存在于博弈动力学的扰动会对博弈的结果造成影响的问题,从而能够使多航天器博弈系统在存在未知扰动的情况下仍能达到唯一的纳什均衡状态,从而提升多航天器博弈系统的抗干扰能力和控制可靠性。
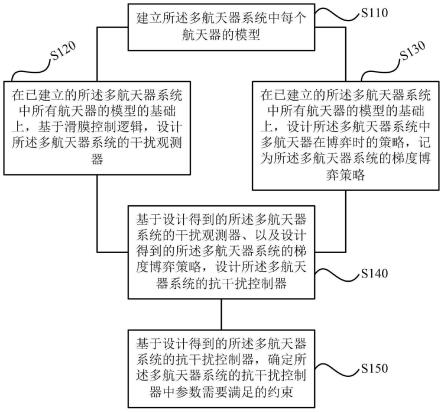
6.为解决上述技术问题,作为本发明的一个方面,提供了一种多航天器系统的抗干扰控制方法,包括如下步骤:
7.建立所述多航天器系统中每个航天器的模型;所述多航天器系统中,具有n个航天器,n为正整数;
8.在已建立的所述多航天器系统中所有航天器的模型的基础上,基于滑膜控制逻辑,设计所述多航天器系统的干扰观测器;
9.以及,在已建立的所述多航天器系统中所有航天器的模型的基础上,设计所述多航天器系统中多航天器在博弈时的策略,记为所述多航天器系统的梯度博弈策略;
10.基于设计得到的所述多航天器系统的干扰观测器、以及设计得到的所述多航天器系统的梯度博弈策略,设计所述多航天器系统的抗干扰控制器;
11.基于设计得到的所述多航天器系统的抗干扰控制器,确定所述多航天器系统的抗干扰控制器中参数需要满足的约束。
12.根据本发明一示例实施方式,所述建立所述多航天器系统中每个航天器的模型,包括:
13.将所述多航天器系统中n个航天器中的任一单个航天器,记为第i个航天器;针对第i个航天器,建立第i个航天器的模型,得到第i个航天器的模型如下:
14.x
i,k+1
=x
i,k
+μ(u
i,k
+d
i,k
);
15.其中,x
i,k+1
表示多航天器博弈系统中第i个航天器在第k+1步的状态;x
i,k
表示多航天器博弈系统中第i个航天器在第k步的状态;u
i,k
是第i个航天器在第k步的控制输入;d
i,k
表示第i个航天器在第k步受到的扰动;μ表示步长;i为介于1至n之间的一个正整数。
16.根据本发明一示例实施方式,所述在已建立的所述多航天器系统中所有航天器的模型的基础上,基于滑膜控制逻辑,设计所述多航天器系统的干扰观测器,包括:
17.基于滑膜控制逻辑,确定所述多航天器系统中相邻两步扰动的扰动差与每步的步长之间的对应关系;相邻两步为第k+1步和第k步,k表示步数;
18.基于已建立的所述多航天器系统中所有航天器的模型、已经已定义的所述多航天器系统中相邻两步扰动的扰动差与每步的步长之间的对应关系,将第k步扰动扩张为新的状态,得到扩张后的所述多航天器系统的状态方程;
19.基于扩张后的所述多航天器系统的状态方程,建立干扰观测器,作为所述多航天器系统的干扰观测器:
[0020][0021]
其中,z
1,i,k+1
、z
2,i,k+1
分别是在第k+1步时干扰观测器对航天器状态x
i,k+1
和航天器扰动d
i,k+1
的估计量,同理z
1,i,k
、z
2,i,k
是第k步的对x
i,k
和d
i,k
的估计量;μ表示步长;α1、α2、α3、α4是干扰观测器的参数;e
1,i,k
是干扰观测器对航天器状态x
i,k+1
的观测误差,定义为e
1,i,k
=z
1,i,k-x
1,i,k
。
[0022]
根据本发明一示例实施方式,所述在已建立的所述多航天器系统中所有航天器的模型的基础上,设计所述多航天器系统中多航天器在博弈时的策略,记为所述多航天器系统的梯度博弈策略,包括:
[0023]
基于已建立的所述多航天器系统中所有航天器的模型,定义所述多航天器系统中第i个航天器的成本函数为ji(xk);
[0024]
确定第i个航天器的成本函数j i
(xk)对自身状态的偏导数即
[0025]
采用梯度博弈策略,定义所述多航天器系统的梯度博弈策略为:
[0026][0027]
其中,ug代表控制器中的博弈策略项。
[0028]
根据本发明一示例实施方式,所述第i个航天器的成本函数是凸函数;
[0029]
和/或,
[0030]
在所述多航天器系统的梯度博弈策略中:
[0031]
其中,f(x)是强单调且lipschitz连续的。
[0032]
根据本发明一示例实施方式,所述基于设计得到的所述多航天器系统的干扰观测器、以及设计得到的所述多航天器系统的梯度博弈策略,设计所述多航天器系统的抗干扰控制器,包括:
[0033]
基于设计得到的所述多航天器系统的干扰观测器、以及设计得到的所述多航天器系统的梯度博弈策略,设计所述多航天器系统中第i个航天器的控制律为:
[0034][0035]
其中,u
i,k
表示所述多航天器系统中第i个航天器的控制律,表示所述多航天器系统中第i个航天器的成本函数对自身状态的偏导数,z
2,i,k
表示所述多航天器系统的干扰观测器对扰动d
i,k+1
的估计量。
[0036]
根据本发明一示例实施方式,所述基于设计得到的所述多航天器系统的抗干扰控制器,确定所述多航天器系统的抗干扰控制器中参数需要满足的约束,包括:
[0037]
基于设计得到的所述多航天器系统的抗干扰控制器、以及所述多航天器系统中第i个航天器的控制律,建立所述多航天器系统在闭环下的状态方程;
[0038]
基于所述多航天器系统在闭环下的状态方程,利用李雅普诺夫定理对所述多航天器系统的收敛性进行分析,得到所述多航天器系统的抗干扰控制器中参数需要满足的约束。
[0039]
作为本发明的第二个方面,本发明提供一种多航天器系统的抗干扰控制装置,包括:
[0040]
建模单元,被配置为建立所述多航天器系统中每个航天器的模型;所述多航天器系统中,具有n个航天器,n为正整数;
[0041]
设计单元,被配置为在已建立的所述多航天器系统中所有航天器的模型的基础上,基于滑膜控制逻辑,设计所述多航天器系统的干扰观测器;
[0042]
以及,所述设计单元,还被配置为在已建立的所述多航天器系统中所有航天器的模型的基础上,设计所述多航天器系统中多航天器在博弈时的策略,记为所述多航天器系统的梯度博弈策略;
[0043]
所述设计单元,还被配置为基于设计得到的所述多航天器系统的干扰观测器、以及设计得到的所述多航天器系统的梯度博弈策略,设计所述多航天器系统的抗干扰控制器;
[0044]
确定单元,被配置为基于设计得到的所述多航天器系统的抗干扰控制器,确定所述多航天器系统的抗干扰控制器中参数需要满足的约束。
[0045]
作为本发明的第三个方面,本发明提供一种多航天器系统,包括:以上所述的多航天器系统的抗干扰控制装置。
[0046]
作为本发明的第四个方面,本发明提供一种多航天器系统,所述存储介质包括存储的程序,其中,在所述程序运行时控制所述存储介质所在设备执行以上所述的多航天器系统的抗干扰控制方法。
[0047]
本发明的有益效果是:
[0048]
本发明的方案,针对受到未知扰动的离散多航天器博弈系统,充分考虑可能出现的匹配扰动,基于干扰观测器设计抗干扰博弈控制策略,实现多航天器的纳什均衡寻求,从而使多航天器博弈系统在存在未知扰动的情况下仍能达到唯一的纳什均衡状态,从而提升多航天器博弈系统的抗干扰能力和控制可靠性。
附图说明
[0049]
图1为示意性示出了的一种多航天器系统的抗干扰控制方法的一实施例的流程示意图;
[0050]
图2为示意性示出了的方法中基于滑膜控制逻辑设计干扰观测器的一实施例的流程示意图;
[0051]
图3为示意性示出了的方法中设计多航天器在博弈时的策略的一实施例的流程示意图;
[0052]
图4为示意性示出了的方法中确定抗干扰控制器中参数需要满足的约束的一实施例的流程示意图;
[0053]
图5为示意性示出了的一种多航天器系统的抗干扰控制装置的一实施例的结构示意图;
[0054]
图6示意性示出了一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方法的流程图。
[0055]
其中,102—建模单元,104—设计单元,106—确定单元。
具体实施方式
[0056]
以下对本发明的实施例进行详细说明,但是本发明可以由权利要求限定和覆盖的多种不同方式实施。
[0057]
在各种抗干扰的方法中,干扰观测器可以实现未知扰动的准确估计并提供一个前馈补偿项对扰动进行抵消,同时也有着很好的动态响应。而滑模控制能够克服多航天器博弈系统的不确定性,对干扰和未建模动态具有很强的鲁棒性,对非线性系统也有良好的控制效果。基于滑膜控制设计的观测器也已经展示出显著的特性,尤其是超扭曲算法。但是关于超扭曲算法的研究绝大多数都是在连续时间条件下,在离散时间系统中的研究很少。本发明的方案,提出了一种多航天器系统的抗干扰控制方案,特别是一种离散时间下的多航天器博弈抗干扰控制方案,尤其是一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方案。该在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方案,考虑了对于离散时间的多航天器博弈问题,设计了基于扰动观测器的博弈控制策略。该基于扰动观测器的博弈控制策略可以让多航天器博弈系统在存在未知扰动的情况下仍能达到唯一的纳什均衡状态。下面结合附图对本发明的方案的具体实现过程进行示例性说明。
[0058]
作为本发明的第一个实施方式,提供一种多航天器系统的抗干扰控制方法,其特征在于,包括如下步骤:步骤s110至步骤s150。
[0059]
在步骤s110处,建立多航天器系统中每个航天器的模型;多航天器系统中,具有n个航天器,n为正整数。
[0060]
在步骤s110中,建立多航天器系统中每个航天器的模型,包括:将多航天器系统中n个航天器中的单个航天器,记为第i个航天器;针对第i个航天器,建立第i个航天器的模型,得到第i个航天器的模型如下:
[0061]
x
i,k+1
=x
i,k
+μ(u
i,k
+d
i,k
)。
[0062]
其中,x
i,k+1
表示多航天器博弈系统中第i个航天器在第k+1步的状态;x
i,k
表示多航天器博弈系统中第i个航天器在第k步的状态;u
i,k
是第i个航天器在第k步的控制输入;d
i,k
表示第i个航天器在第k步受到的扰动;μ表示步长;i为介于1至n之间的一个正整数。
[0063]
具体地,图6示意性示出了一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方法的流程图。如图6所示,本发明的方案提出的一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方法,实现步骤包括:
[0064]
步骤1、建立多航天器博弈系统的航天器模型,具体是建立多航天器博弈系统中单个航天器的模型,该单个航天器的模型如下:
[0065]
x
i,k+1
=x
i,k
+μ(u
i,k
+d
i,k
)
ꢀꢀꢀ
(1)。
[0066]
该模型中,x
i,k+1
表示第i个航天器在第k+1步的状态;x
i,k
表示第i个航天器在第k步的状态;u
i,k
是第i个航天器在第k步的控制输入;d
i,k
表示第i个航天器在第k步受到的扰动;μ表示步长,在本发明的方案中步长是定值;i为正整数。
[0067]
在多航天器博弈系统中,每个航天器都会有与多航天器博弈系统的状态相关的成本函数。第i个航天器的成本函数,定义为ji(xk)。
[0068]
其中,这里,xk是包含n个航天器状态的向量,n为正整数,表示一个定义式。
[0069]
另外,代表第i个航天器的成本函数j i
(xk)对自身状态的偏导数。基于此,定义
[0070]
在步骤s120处,在已建立的多航天器系统中所有航天器的模型的基础上,基于滑膜控制逻辑,设计多航天器系统的干扰观测器。
[0071]
在步骤s120中,在已建立的多航天器系统中所有航天器的模型的基础上,基于滑膜控制逻辑,设计多航天器系统的干扰观测器的具体过程,参见以下示例性说明。
[0072]
下面结合图2所示本发明的方法中基于滑膜控制逻辑设计干扰观测器的一实施例流程示意图,进一步说明步骤s120中基于滑膜控制逻辑设计干扰观测器的具体过程,包括:步骤s210至步骤s230。
[0073]
步骤s210,基于滑膜控制逻辑,确定多航天器系统中相邻两步扰动的扰动差与每步的步长之间的对应关系;相邻两步为第k+1步和第k步,k表示步数。具体地,确定多航天器系统中第k+1步扰动与第k步扰动的扰动差,并基于滑膜控制逻辑,定义该扰动差与每步的
步长之间的对应关系,如定义k表示步数。
[0074]
步骤s220,基于已建立的多航天器系统中所有航天器的模型、已经已定义的多航天器系统中相邻两步扰动的扰动差与每步的步长之间的对应关系,将第k步扰动扩张为新的状态,得到扩张后的多航天器系统的状态方程。
[0075]
步骤s230,基于扩张后的多航天器系统的状态方程,建立干扰观测器,作为多航天器系统的干扰观测器:
[0076][0077]
其中,z
1,i,k+1
、z
2,i,k+1
分别是在第k+1步时干扰观测器对航天器状态x
i,k+1
和航天器扰动d
i,k+1
的估计量,同理z
1,i,k
、z
2,i,k
是第k步的对x
i,k
和d
i,k
的估计量;μ表示步长;α1、α2、α3、α4是干扰观测器的参数;e
1,i,k
是干扰观测器对航天器状态x
i,k+1
的观测误差,定义为e
1,i,k
=z
1,i,k-x
1,i,k
。
[0078]
具体地,如图6所示,本发明的方案提出的一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方法,实现步骤还包括:
[0079]
步骤2、基于步骤1建立的航天器模型,设计干扰观测器。
[0080]
在各种抗干扰的方法中,干扰观测器可以实现未知扰动的准确估计并提供一个前馈补偿项对扰动进行抵消,同时也有着很好的动态响应。而滑模控制能够克服系统的不确定性,对干扰和未建模动态具有很强的鲁棒性,对非线性系统也有良好的控制效果。因此,本发明的方案,基于滑膜控制设计扰动观测器,以克服多航天器博弈系统的不确定性,对干扰和未建模动态具有很强的鲁棒性,实现更好的控制效果。
[0081]
为了基于滑膜控制设计扰动观测器,首先需要建立多航天器博弈系统的扩张状态方程。为了建立多航天器博弈系统的扩张状态方程,需要进行如下定义:
[0082][0083]
其中,d
i,k+1
表示第i个航天器在第k+1步所受到的扰动,f
i,k
代表在第i步时扰动的变化率。
[0084]
然后,基于已建立的单个航天器的模型x
i,k+1
=x
i,k
+μ(u
i,k
+d
i,k
)、以及已定义的通过将扰动d
i,k
扩张为新的状态,得到扩张后多航天器博弈系统的状态方程:
[0085][0086]
对扩张后多航天器博弈系统的状态方程,建立干扰观测器:
[0087][0088]
其中,z
1,i,k+1
、z
2,i,k+1
分别是在第k+1步时干扰观测器对航天器状态x
i,k+1
和航天器扰动d
i,k+1
的估计量,同理z
1,i,k
、z
2,i,k
是第k步的对x
i,k
和d
i,k
的估计量;α1、α2、α3、α4是干扰观测器的参数;e
1,i,k
是干扰观测器对航天器状态x
i,k+1
的观测误差,定义为e
1,i,k
=z
1,i,k-x
i,k
。
[0089]
另外,定义干扰观测器对扰动d
i,k
的观测误差为e
2,i,k
,然后建立干扰观测器的观测误差系统:
[0090][0091]
其中,e
1,i,k+1
是干扰观测器对航天器状态x
i,k+1
的观测误差,e
2,i,k+1
是干扰观测器对航天器扰动d
i,k+2
的观测误差。这里,建立干扰观测器误差系统,以方便从理论上分析干扰观测器的误差收敛性。
[0092]
进一步地,通过以下定义,得到式(4)的简化形式即式(5),以在后续确认相关参数时,方便将参数正定到一个矩阵中:
[0093][0094]ei,k+1
=φe
i,k
+ψsign(e
1,i,k
)
[0095]
其中,φ、ψ均表示参数矩阵。
[0096]
在步骤s130处,在已建立的多航天器系统中所有航天器的模型的基础上,设计多航天器系统中多航天器在博弈时的策略,记为多航天器系统的梯度博弈策略。
[0097]
在步骤s130中,在已建立的多航天器系统中所有航天器的模型的基础上,设计多航天器系统中多航天器在博弈时的策略,记为多航天器系统的梯度博弈策略的具体过程,参见以下示例性说明。
[0098]
下面结合图3所示本发明的方法中设计多航天器在博弈时的策略的一实施例流程示意图,进一步说明步骤s130中设计多航天器在博弈时的策略的具体过程,包括:步骤s310至步骤s330。
[0099]
步骤s310,基于已建立的多航天器系统中所有航天器的模型,定义多航天器系统中第i个航天器的成本函数为j i
(xk)。
[0100]
步骤s320,确定第i个航天器的成本函数j i
(xk)对自身状态的偏导数即
[0101]
步骤s330,采用梯度博弈策略,定义多航天器系统的梯度博弈策略为:
[0102][0103]
其中,ug代表控制器中的博弈策略项。
[0104]
具体地,如图6所示,本发明的方案提出的一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方法,实现步骤还包括:
[0105]
步骤3、基于步骤1建立的航天器模型,设计博弈策略。
[0106]
在多航天器博弈系统中,每个航天器都是一个自私的决策者,他们会尽力优化自己的成本函数,而每个航天器的成本函数之间又存在着耦合关系。因此需要设计博弈策略对航天器自身的成本函数进行优化使多航天器博弈系统达到纳什均衡。
[0107]
其中,纳什均衡是指:如果航天器状态x
*
能使多航天器博弈系统中每一个航天器的成本函数都满足j i
(x
*
)≤j i
(xk),则称航天器状态x
*
是多航天器博弈系统的一个纳什均衡点。
[0108]
本发明的方案,采用梯度博弈策略其中ug代表控制器中的博弈策略项,代表第i个航天器的成本函数对自身状态的偏导数,定义为:
[0109]
基于本发明的方案中对于多航天器博弈系统的假设,该多航天器博弈系统有且只有唯一的纳什均衡点。采用梯度博弈可以使多航天器博弈系统达到纳什均衡。
[0110]
优选地,第i个航天器的成本函数是凸函数。本发明的方案,对于多航天器博弈系统做出几点假设。其中,该几点假设,包括:第1点假设:第i个航天器的成本函数j i
(xk)也称为第i个航天器的代价函数j i
(xk)。假设多航天器博弈系统中航天器的代价函数j i
(xk)对于自身的状态xi,如多航天器博弈系统中第i个航天器的代价函数j i
(xk)多对于自身在第k步的状态x
i,k
,是严格的凸函数。
[0111]
优选地,在多航天器系统的梯度博弈策略中:
[0112]
其中,f(x)是强单调且lipschitz连续的。
[0113]
具体地,结合图6所示的例子,另外,定义具体地,结合图6所示的例子,另外,定义本发明的方案,对于多航天器博弈系统做出几点假设。其中,该几点假设,还包括:第2点假设:假设f(x)是强单调且lipschitz连续(即利普希茨连续)的。这里,定义f(x),是为了方便表达整个多航天器系统。
[0114]
在步骤s140处,基于设计得到的多航天器系统的干扰观测器、以及设计得到的多航天器系统的梯度博弈策略,设计多航天器系统的抗干扰控制器。
[0115]
在步骤s140中,基于设计得到的多航天器系统的干扰观测器、以及设计得到的多航天器系统的梯度博弈策略,设计多航天器系统的抗干扰控制器,包括:基于设计得到的多航天器系统的干扰观测器、以及设计得到的多航天器系统的梯度博弈策略,设计多航天器系统中第i个航天器的控制律为:
[0116][0117]
其中,u
i,k
表示多航天器系统中第i个航天器的控制律,表示多航天器系统中第i个航天器的成本函数对自身状态的偏导数,z
2,i,k
表示多航天器系统的干扰观测器对扰动d
i,k+1
的估计量。
[0118]
具体地,本发明的方案,基于扰动观测器和博弈论,针对离散多航天器系统设计抗
扰动博弈控制策略。如图6所示,本发明的方案提出的一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方法,实现步骤还包括:
[0119]
步骤4、基于步骤2设计的干扰观测器、以及步骤3设计的梯度博弈策略,设计多航天器博弈系统的抗干扰控制器。
[0120]
多航天器博弈系统的抗干扰控制器的设计,主要考虑实现两个功能:第一是优化每个航天器自身的成本函数ji(xk),这是因为在多航天器博弈中,每个航天器都具有自私性,也就是首先要优化自身的性能;第二是对于存在的未知匹配扰动进行估计并消除扰动。
[0121]
基于前边设计的干扰观测器和梯度博弈策略,第i个航天器的控制律设计如下:
[0122][0123]
其中,第一项即是按照每个航天器成本函数的梯度方向对对应航天器的性能进行优化,第二项即-z
2,i,k
是将干扰观测器对扰动d
i,k+1
的估计量z
2,i,k
引入控制中对扰动进行抑制消除。
[0124]
在步骤s150处,基于设计得到的多航天器系统的抗干扰控制器,确定多航天器系统的抗干扰控制器中参数需要满足的约束。
[0125]
本发明的方案,针对受到未知扰动的离散多航天器博弈系统,提供的一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方法,通过设计扰动观测器对未知扰动进行观测估计,再结合梯度博弈策略设计抗干扰的博弈控制策略,实现了基于扰动观测器的博弈控制策略的设计,该基于扰动观测器的博弈控制策略可以让多航天器博弈系统在存在未知扰动的情况下仍能达到唯一的纳什均衡状态,从而使受到干扰的多航天器博弈系统最终达到纳什均衡。
[0126]
从而,克服多航天器博弈系统存在于博弈动力学的扰动会对博弈的结果造成影响的不足,充分考虑可能出现的匹配扰动,基于干扰观测器设计抗干扰博弈控制策略,实现多航天器的纳什均衡寻求,使多航天器博弈系统达到唯一的纳什均衡状态。其中,可能产生匹配扰动的原因包括但不限于控制通道中的信号噪声、执行器故障、多航天器的成本函数不准确、多航天器博弈系统模型误差等。
[0127]
在步骤s150中,基于设计得到的多航天器系统的抗干扰控制器,确定多航天器系统的抗干扰控制器中参数需要满足的约束的具体过程,参见以下示例性说明。
[0128]
下面结合图4所示本发明的方法中确定抗干扰控制器中参数需要满足的约束的一实施例流程示意图,进一步说明步骤s150中确定抗干扰控制器中参数需要满足的约束的具体过程,包括:步骤s410至步骤s420。
[0129]
步骤s410,基于设计得到的多航天器系统的抗干扰控制器、以及多航天器系统中第i个航天器的控制律,建立多航天器系统在闭环下的状态方程。
[0130]
步骤s420,基于多航天器系统在闭环下的状态方程,利用李雅普诺夫定理对多航天器系统的收敛性进行分析,得到多航天器系统的抗干扰控制器中参数需要满足的约束。
[0131]
具体地,如图6所示,本发明的方案提出的一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制方法,实现步骤还包括:
[0132]
步骤5、确定步骤4设计的抗干扰控制器中参数的约束。
[0133]
结合步骤2设计的扰动观测器具体参见公式(3)、以及步骤4设计的第i个航天器的
控制律具体参见公式(6),建立闭环系统的状态方程:
[0134][0135]
进而,将闭环系统的状态方程即公式(7)转化为紧凑形式即公式(8):
[0136][0137]
其中:
[0138][0139][0140][0141][0142][0143][0144][0145]
然后,利用李雅普诺夫定理对多航天器博弈系统的收敛性进行分析,可以得到抗干扰控制器中参数需要满足的约束。这里所说的约束,即约束条件。
[0146]
要保证多航天器博弈系统收敛时,多航天器博弈系统的参数需要满足两个条件。在本发明的方案中,对于参数矩阵需要满足以下两个约束:
[0147]
第1个约束:对于步长μ,要满足其中σ和δ时两个正常数;
[0148]
第2个约束:对于给定的矩阵γ=γ
t
>0,参数矩阵φ使得线性矩阵不等式(lmi)即公式(9)有正定的解h=h
t
>0。
[0149][0150]
其中,参数矩阵σ和δ是两个正的常数,i是单位矩阵,γ为常数且满足0<γ<1。
[0151]
本发明的方案,与相关方案相比,至少具有以下优点:
[0152]
一方面,本发明的方案,可以对扰动进行很好的估计和消除,在多航天器博弈问题中,扰动的存在是不能忽略的,因为未知扰动会对博弈的结果造成影响。本发明的方案所设计的抗干扰控制器可以实现对智能体自身的成本函数进行优化的同时,对扰动进行估计和抵消,使多航天器博弈系统达到唯一的纳什均衡状态。
[0153]
另一方面,与实际工程问题相贴合,采用离散的系统模型进行分析设计,而且设计的抗干扰控制器对扰动的约束和信息要求很少,不需要知道扰动的具体形式,不约束扰动有界,便于工程实现。
[0154]
根据本发明的第二个实施方式,提供一种多航天器系统的抗干扰控制装置。参见图5所示本发明的装置的一实施例的结构示意图。该多航天器系统的抗干扰控制装置可以包括:包括:建模单元102、设计单元104和确定单元106。
[0155]
其中,建模单元102,被配置为建立多航天器系统中每个航天器的模型;多航天器系统中,具有n个航天器,n为正整数;该建模单元的具体功能及处理参见步骤s110及其相关说明,在此不再赘述。
[0156]
设计单元104,被配置为在已建立的多航天器系统中所有航天器的模型的基础上,基于滑膜控制逻辑,设计多航天器系统的干扰观测器;该设计单元的具体功能及处理参见步骤s120及其相关说明,在此不再赘述。
[0157]
以及,设计单元104,还被配置为在已建立的多航天器系统中所有航天器的模型的基础上,设计多航天器系统中多航天器在博弈时的策略,记为多航天器系统的梯度博弈策略;该设计单元的具体功能及处理还参见步骤s130及其相关说明,在此不再赘述。
[0158]
设计单元104,还被配置为基于设计得到的多航天器系统的干扰观测器、以及设计得到的多航天器系统的梯度博弈策略,设计多航天器系统的抗干扰控制器;该设计单元的具体功能及处理还参见步骤s140及其相关说明,在此不再赘述。
[0159]
确定单元106,被配置为基于设计得到的多航天器系统的抗干扰控制器,确定多航天器系统的抗干扰控制器中参数需要满足的约束。该确定单元的具体功能及处理还参见步骤s150及其相关说明,在此不再赘述。
[0160]
另外,由于本实施例的装置所实现的处理及功能基本相应于前述方法的实施例、原理和实例,故本实施例的描述中未详尽之处,可以参见前述实施例中的相关说明,在此不做赘述。
[0161]
本发明的方案,针对受到未知扰动的离散多航天器博弈系统,提供的一种在碎片清理时离散时间下的多航天器抗干扰的纳什均衡寻求控制装置,通过设计扰动观测器对未知扰动进行观测估计,再结合梯度博弈策略设计抗干扰的博弈控制策略,实现了基于扰动观测器的博弈控制策略的设计,该基于扰动观测器的博弈控制策略可以让多航天器博弈系统在存在未知扰动的情况下仍能达到唯一的纳什均衡状态,从而使受到干扰的多航天器博弈系统最终达到纳什均衡。
[0162]
从而,克服多航天器博弈系统存在于博弈动力学的扰动会对博弈的结果造成影响的不足,充分考虑可能出现的匹配扰动,基于干扰观测器设计抗干扰博弈控制策略,实现多航天器的纳什均衡寻求,使多航天器博弈系统达到唯一的纳什均衡状态。其中,可能产生匹配扰动的原因包括但不限于控制通道中的信号噪声、执行器故障、多航天器的成本函数不
准确、多航天器博弈系统模型误差等。
[0163]
根据本发明的第三个实施方式,提供一种多航天器系统,其特征在于,包括:以上的多航天器系统的抗干扰控制装置。
[0164]
由于本实施例的多航天器系统所实现的处理及功能基本相应于前述装置的实施例、原理和实例,故本实施例的描述中未详尽之处,可以参见前述实施例中的相关说明,在此不做赘述。
[0165]
根据本发明的第四个实施方式,提供一种多航天器系统,其特征在于,存储介质包括存储的程序,其中,在程序运行时控制存储介质所在设备执行以上的多航天器系统的抗干扰控制方法。
[0166]
由于本实施例的存储介质所实现的处理及功能基本相应于前述方法的实施例、原理和实例,故本实施例的描述中未详尽之处,可以参见前述实施例中的相关说明,在此不做赘述。
[0167]
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1