一种任意时间到达的固定翼无人机制导方法
1.本发明属于无人机控制技术领域,特别是涉及一种任意时间到达的固定翼无人机制导方法。
背景技术:
2.20世纪90年代以来,无人机在军用和民用领域得到了广泛的关注与发展。相比于旋翼无人机,固定翼无人机具有飞行速度快、飞行距离远、飞行高度高等特点。在执行某些任务时,固定翼无人机具有不可取代的优势。目前来看,随着任务的复杂程度越来越高,单个无人机难以满足任务的需求,通过多无人机协同可以有效提高执行任务的能力。这就要求多无人机能够同时到达指定的任务区域,而对于单无人机来说,就要求无人机能够控制其到达指定任务区域的时间。
3.时间控制制导律能够控制无人机的飞行时间,实现无人机以期望时间到达任务区域,但是通过详细研究发现,目前的时间控制制导律能在有限范围内控制飞行时间,但是很难实现飞行时间的任意控制,当多无人机与指定的任务区域距离相差比较大时,制导律难以实现多无人机同时到达指定任务区域。
技术实现要素:
4.针对以上技术问题,本发明提供一种任意时间到达的固定翼无人机制导方法。
5.本发明解决其技术问题采用的技术方案是:
6.一种任意时间到达的固定翼无人机制导方法,方法包括以下步骤:
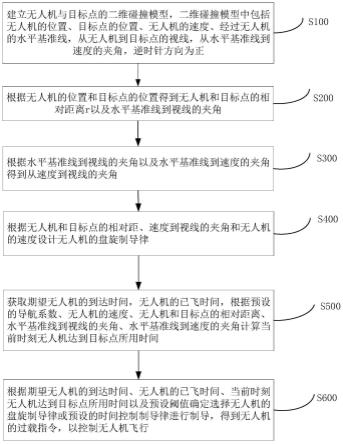
7.步骤s100:建立无人机与目标点的二维碰撞模型,二维碰撞模型中包括无人机的位置、目标点的位置、无人机的速度v、经过无人机的水平基准线ref,从无人机到目标点的视线los,从水平基准线ref到速度v的夹角θ,逆时针方向为正;
8.步骤s200:根据无人机的位置和目标点的位置得到无人机和目标点的相对距离r以及水平基准线ref到视线los的夹角q;
9.步骤s300:根据水平基准线到视线的夹角q以及水平基准线ref到速度v的夹角θ得到从速度v到视线los的夹角η;
10.步骤s400:根据无人机和目标点的相对距离r、速度v到视线los的夹角η和无人机的速度v设计无人机的盘旋制导律;
11.步骤s500:获取期望无人机的到达时间为td,无人机的已飞时间为t,根据预设的导航系数、无人机的速度v、无人机和目标点的相对距离r、水平基准线ref到视线los的夹角q、水平基准线到速度的夹角θ计算当前时刻无人机达到目标点所用时间t
go
;
12.步骤s600:根据期望无人机的到达时间td、无人机的已飞时间t、当前时刻无人机达到目标点所用时间t
go
以及预设阈值确定选择无人机的盘旋制导律或预设的时间控制制导律进行制导,得到无人机的过载指令,以控制无人机飞行。
13.优选地,步骤s200中根据无人机的位置和目标点的位置得到无人机和目标点的相
对距离r,具体为:
[0014][0015]
具体地,(x,y)为无人机的位置,(x
t
,y
t
)为目标点的位置。
[0016]
优选地,步骤s200中根据无人机的位置和目标点的位置得到水平基准线ref到视线los的夹角q,具体为:
[0017]
若x
t
≥x,则
[0018]
若x
t
<x,y
t
≥y,则
[0019]
若x
t
<x,y
t
<y,则
[0020]
其中,q为水平基准线ref到视线los的夹角。
[0021]
优选地,步骤s300具体为:
[0022]
η=q-θ
[0023]
其中,θ为水平基准线ref到速度v的夹角,η为速度v到视线los的夹角。
[0024]
优选地,步骤s400包括:
[0025]
步骤s410:根据无人机和目标点的相对距离r、速度v到视线los的夹角η和无人机的速度v得到水平基准线ref到视线los的角速率
[0026]
步骤s420:根据无人机的速度v、速度v到水平基准线ref的夹角η以及水平基准线ref到视线los的角速率设计无人机的盘旋制导律。
[0027]
优选地,步骤s410具体为:
[0028][0029]
其中,为水平基准线ref到视线los的角速率;
[0030]
步骤s420具体为:
[0031][0032]
其中,a为无人机的过载指令。
[0033]
优选地,步骤s500中根据预设的导航系数、无人机的速度v、无人机和目标点的相对距离r、水平基准线ref到视线los的夹角q、水平基准线到速度的夹角θ计算当前时刻无人机达到目标点所用时间t
go
,具体为:
[0034][0035]
其中,t
go
为当前时刻无人机达到目标点所用时间,n为预设的导航系数。
[0036]
优选地,步骤s600中预设的时间控制制导律,具体为:
[0037][0038]
其中,td为期望无人机的到达时间、t为无人机的已飞时间、t
go
为当前时刻无人机达到目标点所用时间。
[0039]
优选地,步骤s600具体为:
[0040]
若则使用盘旋制导律进行制导;
[0041]
若则使用预设的时间控制制导律进行制导。
[0042]
优选地,步骤s600之后还包括:
[0043]
步骤s700:当无人机和目标点的相对距离r小于预设距离阈值时,制导停止。
[0044]
上述一种任意时间到达的固定翼无人机制导方法,通过建立无人机与目标点的二维碰撞模型,计算其中的参数,并设计得到盘旋制导律,通过盘旋制导律与预设的时间控制制导律的切换实现飞行时间的任意控制。
附图说明
[0045]
图1为本发明一种任意时间到达的固定翼无人机制导方法的流程图;
[0046]
图2为本发明一实施例中无人机与目标点的二维碰撞模型示意图。
具体实施方式
[0047]
为了使本技术领域的人员更好地理解本发明的技术方案,下面结合附图对本发明作进一步的详细说明。
[0048]
在一个实施例中,如图1所示,一种任意时间到达的固定翼无人机制导方法,方法包括以下步骤:
[0049]
步骤s100:建立无人机与目标点的二维碰撞模型,二维碰撞模型中包括无人机的位置、目标点的位置、无人机的速度v、经过无人机的水平基准线ref,从无人机到目标点的视线los,从水平基准线ref到速度v的夹角θ,逆时针方向为正。
[0050]
具体地,如图2所示为无人机与目标点的二维碰撞模型的示意图,其中,xoy代表惯性坐标系。
[0051]
步骤s200:根据无人机的位置和目标点的位置得到无人机和目标点的相对距离r以及水平基准线ref到视线los的夹角q。
[0052]
在一个实施例中,步骤s200中根据无人机的位置和目标点的位置得到无人机和目标点的相对距离r,具体为:
[0053][0054]
具体地,(x,y)为无人机的位置,(x
t
,y
t
)为目标点的位置。
[0055]
在一个实施例中,步骤s200中根据无人机的位置和目标点的位置得到水平基准线ref到视线los的夹角q,具体为:
[0056]
若x
t
≥x,则
[0057]
若x
t
<x,y
t
≥y,则
[0058]
若x
t
<x,y
t
<y,则
[0059]
其中,q为水平基准线ref到视线los的夹角。
[0060]
步骤s300:根据水平基准线到视线的夹角q以及水平基准线ref到速度v的夹角θ得到从速度v到视线los的夹角η。
[0061]
在一个实施例中,步骤s300具体为:
[0062]
η=q-θ
[0063]
其中,θ为水平基准线ref到速度v的夹角,η为速度v到视线los的夹角。
[0064]
步骤s400:根据无人机和目标点的相对距离r、速度v到视线los的夹角η和无人机的速度v设计无人机的盘旋制导律。
[0065]
在一个实施例中,步骤s400包括:
[0066]
步骤s410:根据无人机和目标点的相对距离r、速度v到视线los的夹角η和无人机的速度v得到水平基准线ref到视线los的角速率
[0067]
步骤s420:根据无人机的速度v、速度v到水平基准线ref的夹角η以及水平基准线ref到视线los的角速率设计无人机的盘旋制导律。
[0068]
在一个实施例中,步骤s410具体为:
[0069][0070]
其中,为水平基准线ref到视线los的角速率。
[0071]
进一步地,步骤s420具体为:
[0072][0073]
其中,a为无人机的过载指令。
[0074]
步骤s500:获取期望无人机的到达时间为td,无人机的已飞时间为t,根据预设的导航系数、无人机的速度v、无人机和目标点的相对距离r、水平基准线ref到视线los的夹角q、水平基准线到速度的夹角θ计算当前时刻无人机达到目标点所用时间t
go
。
[0075]
在一个实施例中,步骤s500中根据预设的导航系数、无人机的速度v、无人机和目标点的相对距离r、水平基准线ref到视线los的夹角q、水平基准线到速度的夹角θ计算当前时刻无人机达到目标点所用时间t
go
,具体为:
[0076][0077]
其中,t
go
为当前时刻无人机达到目标点所用时间,n为预设的导航系数。
[0078]
具体地,在本技术中,n=3。
[0079]
步骤s600:根据期望无人机的到达时间td、无人机的已飞时间t、当前时刻无人机达到目标点所用时间t
go
以及预设阈值确定选择无人机的盘旋制导律或预设的时间控制制导律进行制导,得到无人机的过载指令,以控制无人机飞行。
[0080]
在一个实施例中,步骤s600中预设的时间控制制导律,具体为:
[0081][0082]
其中,td为期望无人机的到达时间、t为无人机的已飞时间、t
go
为当前时刻无人机达到目标点所用时间。
[0083]
在一个实施例中,步骤s600具体为:
[0084]
若则使用盘旋制导律进行制导;
[0085]
若则使用预设的时间控制制导律讲行制导。
[0086]
具体地,预设阈值为可以根据实际需求设置其他值。想要控制无人机到达指定任务区域的时间,就需要时间控制制导律,但是时间控制制导律对时间的控制能力是有限的,假如时间控制制导律可以控制无人机到达指定区域的时间范围为(30-100)秒,当我们需要无人机120秒飞到指定区域,单纯使用时间控制制导律就无法满足要求,所以此时考虑先使用盘旋制导律,控制无人机绕目标区域盘旋飞行,消耗掉一部分时间,再使用时间控制制导律,即可以实现无人机到达目标点的时间可以在最短飞行时间与无穷时间之间任意选择。
[0087]
在一个实施例中,步骤s600之后还包括:
[0088]
步骤s700:当无人机和目标点的相对距离r小于预设距离阈值时,制导停止。
[0089]
具体地,预设距离阈值为3,当r<3,则视为无人机已到达目标点,制导停止。
[0090]
上述一种任意时间到达的固定翼无人机制导方法,通过建立无人机与目标点的二维碰撞模型,计算其中的参数,并设计得到盘旋制导律,通过盘旋制导律与预设的时间控制制导律的切换实现飞行时间的任意控制。
[0091]
以上对本发明所提供的一种任意时间到达的固定翼无人机制导方法进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1