四旋翼飞行器自适应滑模控制系统的建立方法
1.本发明属于四旋翼飞行器控制的技术领域,具体涉及一种四旋翼飞行器自适应滑模控制系统的建立方法。
背景技术:
2.近年来,四旋翼无人机在军事和民用领域广泛的应用,如军事检测、灾害监测、农业服务、测绘和摄影等等;与传统的固定翼飞行器相比,四旋翼无人机具有垂直起降、稳定悬停、携带方便、体积小等特点。然而,四旋翼无人机系统本身的多变量、非线性、强耦合和对干扰的敏感性使其难以控制,飞行过程中也会遇到空气阻力和其他外部干扰,因此在设计控制器时需要考虑各种外部干扰问题。此外,四旋翼无人机的动力学模型复杂,其中一些气动参数难以精确测量,这些未知的不确定性进一步增加了四旋翼无人机控制器设计的难度,因此为了实现四旋翼飞行器的自主飞行,满足高可靠性的飞行要求,四旋翼无人机的姿态控制问题越来越重要。
技术实现要素:
3.本发明的目的在于针对现有技术的不足之处,提供一种四旋翼飞行器自适应滑模控制系统的建立方法,该方法能够实时根据扰动大小改变切换项的增益来补偿扰动估计误差,做到大扰动时增大增益值,提升抗扰能力,在外部扰动较小的时候,减小切换项增益,在不改变控制器效果前提下,抑制滑模控制的抖振问题。
4.为解决上述技术问题,本发明采用如下技术方案:
5.一种四旋翼飞行器自适应滑模控制系统的建立方法,包括如下步骤:
6.步骤1,根据四旋翼飞行器的姿态动力学方程,设计用于实时估计整个系统中的扰动线性扩张状态观测器;
7.步骤2,根据四旋翼飞行器的姿态动力学方程和所设计的线性扩张状态观测器设计自适应滑模控制系统,该滑模控制系统的控制律部分包括实时根据扰动大小改变切换项的增益来补偿扰动估计误差的可变增益切换项;
8.步骤3,对四旋翼飞行器自适应滑模控制系统进行稳定性分析。
9.进一步地,步骤1中,根据四旋翼横滚角、俯仰角或偏航角子系统设计扰动线性扩张状态观测器。
10.进一步地,根据牛顿力学和牛顿-拉格朗日方程,四旋翼飞行器的虚拟控制输入和姿态动力学方程分别表示如下:
11.[0012][0013]
其中,u1(t)表示沿z轴作用在机身上的总推力,u2(t)、u3(t)和u4(t)分别表示横滚、俯仰和偏航扭矩,l》0b》0,c》0是升力常数,ωi(t),i=1,2,3,4表示四个转子的角速度,φ(t)、θ(t)和ψ(t)分别表示横滚角、俯仰角和偏航角的角度;φ(t)、θ(t)和ψ(t)分别表示横滚角、俯仰角和偏航角的角度;和分别表示横滚角、俯仰角和偏航角的角速度;和分别表示横滚角、俯仰角和偏航角的角加速度,j
xx
表示为x轴的转动惯量,j
yy
表示为y轴的转动惯量,j
zz
表示为z轴的转动惯量,ki(i=4,5,6)为风阻系数,jr为电机的转子惯量,ωr是四旋翼飞行器电机产生的扰动;
[0014]
横滚角子系统控制设计为:令[x1(t),x2(t)]
t
=[φ(t),p(t)]
t
,将横滚角子系统重写为:
[0015][0016]
其中,x1(t)为横滚角角度φ(t),x2(t)为横滚角角速度u1代表着控制的输入,代表着横滚角系统中的集中不确定性,并考虑到物理位置的有界性,假设f1(t)是二阶连续可微的,是有界的,即
[0017]
假设并根据上述公式(3)的横滚角子系统设计的线性扩张状态观测器为:
[0018][0019]
其中,α1》0,α2》0,α3》0是线性扩张状态观测器的增益,ω为线性扩张状态观测器的带宽;分别对应为z1(t)、z2(t)、z3(t)的导数,分别为的在线估计,分别对应为x1(t)、x2(t)、f1(t)的导数,并且使得最终观测误差e3(t)=|f1(t)-z3(t)|《δ,δ为预设值;
[0020]
根据俯仰角和偏航角子系统设计线性扩张状态观测器方法同上。
[0021]
进一步地,步骤2中控制系统的设计方法为:
[0022]
选取滑模控制的滑模面为
[0023]
[0024]
其中,s1(t)表示滑模面,k表示正常数,e1(t)=x1(t)-x
d,1
(t)表示当前状态x1(t)和参考状态x
d,1
(t)之间的误差,并且x
d,1
(t)二阶连续可微的信号,表示信号误差的一阶微分;
[0025]
设计的自适应滑模控制律如下:
[0026][0027]
其中,k
s,1
》0,饱和函数
[0028]
式中,κ表示接近于0的正数;
[0029]
可变增益切换项为:
[0030][0031]
其中,g(t)=sgn(|s1(t)|-ξ),d1,d2,ξ,δ是正常数;若s1(t)》ξ,此时干扰较大,d(t)快速上升以达到抵消大干扰的效果;若s1(t)《ξ,此时d(t)减小,抵消干扰的同时也减小的控制器的抖振;
[0032]
根据横滚角子系统设计的线性扩张状态观测器得到的滑模控制系统为:
[0033][0034]
其中k》0,k
s,1
》0,z3(t)是线性扩张状态观测器的实时估计值。
[0035]
进一步地,步骤3中借助lyapunov稳定性理论对四旋翼滑膜控制系统进行了稳定性分析,其中,lyapunov函数为:
[0036][0037]
进一步地,对滑膜控制系统进行稳定性分析如下:
[0038]
对lyapunov函数求时间导数:
[0039][0040]
分析一:当|s1(t)|≥κ时,此时sat(s1(t))=sgn(s1(t));
[0041]
(1)δ《d(t)
[0042][0043]
(2)δ≥d(t)
[0044][0045]
求解上述有关v(t)的微分方程为:
[0046][0047]
当时
[0048][0049]
分析二:当|s1(t)|《κ时,此时
[0050][0051]
求解上述有关v(t)的微分方程:
[0052][0053]
当
[0054][0055]
通过以上关于稳定性的分析,可以得到所设计的控制器是稳定且可行的。
[0056]
与现有技术相比,本发明的有益效果为:本发明能够实时根据扰动大小改变切换项的增益d(t)来补偿扰动估计误差,此时s1(t)》ξ,外部扰动较大,d(t)快速上升以达到抵消大干扰的效果;做到大扰动时增大增益值,提升抗扰能力;在外部扰动较小的时候,减小切换项增益,此时s1(t)《ξ,d(t)减小,抑制扰动的同时也减小的控制器的抖振问题。
附图说明
[0057]
图1为本发明实施例搭建的四旋翼飞行器模型;
[0058]
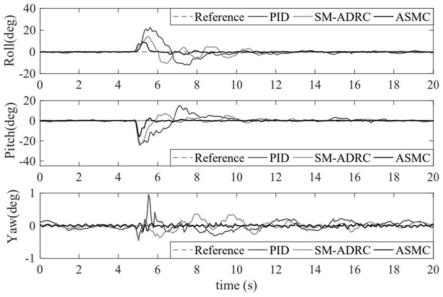
图2表示本发明实施例不同算法在实际实验中的跟踪效果;
[0059]
图3表示本发明实施例不同算法在实际实验中的阶跃扰动下的抗扰效果;
[0060]
图4表示不同算法在强风扰动下不同算法的靠绕效果。
具体实施方式
[0061]
下面将结合本发明实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0062]
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
[0063]
下面结合具体实施例对本发明作进一步说明,但不作为本发明的限定。
[0064]
本发明提供一种四旋翼飞行器自适应滑模控制系统的建立方法,包括以下步骤:
[0065]
步骤1,根据四旋翼飞行器的姿态动力学方程,设计用于实时估计整个系统中的扰动线性扩张状态观测器;
[0066]
根据牛顿力学和牛顿-拉格朗日方程,四旋翼飞行器的虚拟控制输入和姿态动力学方程可分别表示如下:
[0067][0068][0069]
其中,u1(t)表示沿z轴作用在机身上的总推力,u2(t)、u3(t)和u4(t)分别表示横滚、俯仰和偏航扭矩,l》0b》0,c》0是升力常数,ωi(t),i=1,2,3,4表示四个转子的角速度,φ(t)、θ(t)和ψ(t)分别表示横滚角、俯仰角和偏航角的角度;φ(t)、θ(t)和ψ(t)分别表示横滚角、俯仰角和偏航角的角度;和分别表示横滚角、俯仰角和偏航角的角速度;和分别表示横滚角、俯仰角和偏航角的角加速度,j
xx
表示为x轴的转动惯量,j
yy
表示为y轴的转动惯量,j
zz
表示为z轴的转动惯量,ki(i=4,5,6)为风阻系数,jr为电机的转子惯量,ωr是四旋翼飞行器电机产生的扰动。
[0070]
由于四旋翼横滚角、俯仰角和偏航角三个通道的控制器设计相似,这里仅以如下的横滚角子系统为例进行控制器的设计:
[0071][0072]
令可将横滚角子系统(3)可重写为:
[0073][0074]
其中,x1(t)为横滚角角度φ(t),x2(t)为横滚角角速度u1(t)代表着控制的输入,代表着横滚角系统中的集中不确定性。并考虑到物理位置的有界性,假设f1(t)是二阶连续可微的,是有界的,即
[0075]
根据上述公式(4)的横滚角子系统,可设计线性扩张状态观测器为:
[0076][0077]
其中,α1》0,α2》0,α3》0是线性扩张状态观测器的增益,ω为线性扩张状态观测器的带宽。分别为的在线估计,其中,为z1(t)、z2(t)、z3(t)的导数,分别对应为x1(t)、x2(t)、f1(t)的导数,并且可以使得最终观测误差e3(t)=|f1(t)-z3(t)|《δ,δ为一个很小的正常数,可以事先预设一个值。
[0078]
步骤2,根据四旋翼飞行器的姿态动力学方程和所设计的线性扩张状态观测器设计自适应滑模控制系统,该滑模控制系统的控制律部分包括实时根据扰动大小改变切换项的增益来补偿扰动估计误差的可变增益切换项;
[0079]
在该步骤中,滑模控制器的设计主要包括如下:
[0080]
选取滑模控制的滑模面为
[0081][0082]
其中,s1(t)表示滑模面,k表示正常数,e1(t)=x1(t)-x
d,1
(t)表示当前状态x1(t)和参考状态x
d,1
(t)之间的误差,并且x
d,1
(t)为二阶连续可微的信号,表示信号误差的一阶微分。
[0083]
设计的自适应滑模控制律如下
[0084][0085]
其中,k
s,1
》0,饱和函数表示如下
[0086][0087]
其中,κ表示接近于0的正数;
[0088]
可变增益切换项为:
[0089][0090]
其中,g(t)=sgn(|s1(t)|-ξ),d1,d2,ξ,δ是正常数。若s1(t)》ξ,此时系统的外部扰动较大,d(t)将会已2d1的速率快速上升以达到抑制大扰动的效果,当增益变大的控制器因为抑制扰动使得s1(t)《ξ,此时对于系统来说外部的扰动相对较小,d(t)会以-2d2的速率缓慢的减小。通过这种方式,实时变化的d(t)不仅提升了整个控制器在外部大扰动下的自抗扰能力,而且还减小了外部小扰动下控制器大增益造成的抖振问题。
[0091]
根据以上的分析,联立等式(4)、(5)、(6)、(7)、(8)和(9),可以设计系统的自适应滑模控制器u1(t)为
[0092][0093]
其中k》0,是参考信号x
d,1
(t)的二阶微分,z3(t)是线性扩张状态观测器对外部扰动的实时估计值。
[0094]
步骤3,对四旋翼飞行器自适应滑模控制系统进行稳定性分析:
[0095]
在本实施例中,借助lyapunov稳定性理论对四旋翼飞行器滑模控制系统进行了稳定性分析,lyapunov函数为:
[0096][0097]
对其求时间导数可得:
[0098][0099]
其中,表示状态误差e1(t)的二阶导,e3(t)线性扩张状态观测器的观测误差。
[0100]
分析一:
[0101]
当|s1(t)|≥κ时,由等式(8)可知,此时sat(s1(t))=sgn(s1(t));
[0102]
(1)δ《d(t)
[0103][0104]
(2)δ≥d(t)
[0105][0106]
求解(14)的微分方程得到:
[0107][0108]
当时
[0109][0110]
分析二:当|s1(t)|《κ时,由等式(8)可知,此时
[0111][0112]
求解(17)的微分方程可得
[0113][0114]
当
[0115][0116]
通过以上关于稳定性的分析,可以得到所设计的控制器是稳定且可行的。
[0117]
此外,相同的控制器设计也可以用于俯仰角和偏航角控制子系统的设计。
[0118][0119][0120]
和
[0121][0122]
[0123]
其中,x
d,2
(t),x
d,3
(t)分别为俯仰角子系统和偏航角子系统的参考信号;z4(t),z5(t)分别为横滚角子系统和俯仰角子系统的总干扰的扩张状态观测器实时估计值。
[0124]
为了说明本发明的有益效果,搭建如图1所示的实验平台,其包括一台装有上位机的笔记本电脑,一个遥控器,一个信号接收器和一个四旋翼姿态控制的验证装置,用200g砝码来模拟阶跃干扰,用吹尘枪吹出的风来模拟强风干扰,其最高风速可达到21m/s。通过与pid和smadrc算法相对比,对比结果表现如下图所示图2-图4。参考信号给定为ψr(t)=0。
[0125]
图2表示不同算法在实际实验中的跟踪效果,可以看出本实施例提出的算法相比较pid来说,具有明显的跟踪效果。图3表示不同算法在实际实验中的阶跃扰动下的抗扰效果,此时在t=5s时刻加入了阶跃扰动,外部扰动较大,本实施例随着变增益的迅速增大,可以快速的抑制扰动,可以从图中明显看出因扰动加大所造成的超调相较于pid和smadrc小,在扰动抑制过程结束后,本实施例算法的变增益慢慢减小,减弱了滑模控制的抖振,从图3中可以明显看出smadrc具有强烈的抖振,而本实施例算法并无此现象。图4表示不同算法在强风扰动下不同算法的抗扰效果,也可以明显看出本发明算法的因强风扰动所带来的超调较小。
[0126]
以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1