线控系统调试方法、装置、终端设备及存储介质与流程
1.本技术实施例涉及智能驾驶技术领域,特别是涉及一种线控系统调试方法、装置、终端设备及存储介质。
背景技术:
2.在智能驾驶功能开发过程中,线控的对手件软件根据双方握手协议约定开发后第一次释放时,双方需要进行接口联调。
3.现有技术中,在进行接口联调时,主要是通过canoe模拟信号收发或者采用嵌入式软件直接控制。但是,嵌入式软件开发周期较长,而且改动较为困难,这些都导致联调效率较低;canoe模拟信号收发,需要通过人工控制信号发送,而且能够发出的信号数量有限,导致联调效率较低,新手难以上手。
技术实现要素:
4.本技术实施例提供一种线控系统调试方法、装置、终端设备及存储介质,有助于提高联调效率。
5.为了解决上述问题,第一方面,本技术实施例提供了一种线控系统调试方法,应用于终端设备,所述终端设备和车辆底盘can总线连接,包括:
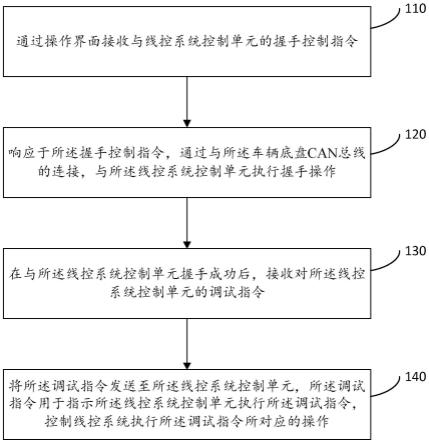
6.通过操作界面接收与线控系统控制单元的握手控制指令;
7.响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,与所述线控系统控制单元执行握手操作;
8.在与所述线控系统控制单元握手成功后,接收对所述线控系统控制单元的调试指令;
9.将所述调试指令发送至所述线控系统控制单元,所述调试指令用于指示所述线控系统控制单元执行所述调试指令,控制线控系统执行所述调试指令所对应的操作。
10.第二方面,本技术实施例提供了一种线控系统调试装置,应用于终端设备,所述终端设备和车辆底盘can总线连接,包括:
11.握手指令接收模块,用于通过操作界面接收与线控系统控制单元的握手控制指令;
12.握手模块,用于响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,与所述线控系统控制单元执行握手操作;
13.调试指令接收模块,用于在与所述线控系统控制单元握手成功后,接收对所述线控系统控制单元的调试指令;
14.调试指令发送模块,用于将所述调试指令发送至所述线控系统控制单元,所述调试指令用于指示所述线控系统控制单元执行所述调试指令,控制线控系统执行所述调试指令所对应的操作。
15.第三方面,本技术实施例还提供了一种终端设备,包括存储器、处理器及存储在所
brake,综合电子制动器)中的至少一种。
34.可以使用通信数据线连接终端设备和车辆底盘can总线,这样便可以对eps、vcu、idb进行测试验证。其中,所述通信数据线是vector工具,例如可以是canoe硬件。所述车辆底盘can总线可以是真实车辆上的底盘can总线,这样可以在真实车辆上进行调试,以在真实场景中进行调试。
35.本技术实施例中的车辆控制调试方法可以通过canoe工程实现,当然,也可以使用其他can总线工具实现。canoe工程可以通过capl(communication access programming language,通信接口编程语言)脚本实现。
36.在该线控系统调试方法通过canoe工程实现时,终端设备需要安装canoe软件,在该终端设备安装的canoe软件中打开canoe工程,终端设备可以显示hmi(human machine interface,人机接口)操作界面,通过操作界面,用户可以输入调试指令,便可以与线控的对手件软件进行联调。所述终端设备作为虚拟apa(automated parking assist,自动泊车辅助系统),用于模拟apa,即作为线控软件,来实现与线控软件的对手件软件的联调。所述对手件软件包括eps控制软件、vcu控制软件、idb控制软件,如转向控制软件、换挡控制软件、加减速控制软件等。
37.在操作界面上设置有与线控系统控制单元对应的使能按钮,如果检测到使能按钮被按下,则确定接收到与线控系统控制单元的握手控制指令。
38.步骤120,响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,与所述线控系统控制单元执行握手操作。
39.终端设备在接收到握手控制指令时,通过与车辆底盘can总线的连接,与线控系统控制单元进行通信,以执行与线控系统控制单元的握手操作。
40.可以基于状态机与信号发送时序,来控制握手操作过程中的信号发送,不需要人为控制每个信号的发送,可以提高联调效率。
41.步骤130,在与所述线控系统控制单元握手成功后,接收对所述线控系统控制单元的调试指令。
42.在与线控系统控制单元握手成功后,用户可以在操作界面上输入对线控系统控制单元的调试指令,终端设备便可以接收到对线控系统控制单元的调试指令。其中,调试指令可以是对方向盘转角的调试指令、对档位的调试指令或者加减速度调试指令等。
43.步骤140,将所述调试指令发送至所述线控系统控制单元,所述调试指令用于指示所述线控系统控制单元执行所述调试指令,控制线控系统执行所述调试指令所对应的操作。
44.在接收到对线控系统控制单元的调试指令后,通过与车辆底盘can总线的连接,将调试指令发送至线控系统控制单元,线控系统控制单元接收到调试指令后,可以执行该调试指令,以控制线控系统执行调试指令所对应的操作,用户可以观察车辆的情况,以了解到线控系统执行调试指令所带来的结果。
45.本技术实施例提供的线控系统调试方法,通过操作界面接收与线控系统控制单元的握手控制指令,执行与线控系统控制单元的握手操作,在与线控系统控制单元握手成功后,接收对线控系统控制单元的调试指令,将调试指令发送至线控系统控制单元,线控系统控制单元可以控制线控系统执行相应的操作,通过操作界面便可以实现线控软件与对手件
软件的联调,而且可以自动执行握手操作并发送调试指令,不需要人工控制每个信号的发送,可以提高联调效率。
46.图2是本技术实施例提供的一种线控系统调试方法的流程图,本实施例中以对eps进行联调的过程进行说明,所述线控系统控制单元包括eps,所述操作界面包括eps控制界面。如图2所示,该方法包括:
47.步骤210,通过操作界面接收与线控系统控制单元的握手控制指令。
48.eps控制界面中包括使能按钮,在检测到用户对该使能按钮的触发操作时,确定接收到与eps的握手控制指令。
49.步骤220,响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,向所述eps发送握手请求信号。
50.在接收到与eps的握手控制指令时,向车辆底盘can总线发送与eps的握手请求信号,车辆中的eps可以从车辆底盘can总线上获取到该握手请求信号。
51.步骤230,通过与所述车辆底盘can总线的连接,接收所述eps反馈的自检状态。
52.eps接收到握手请求信号后,对自身状态进行自检,得到自检状态,将自检状态发送至车辆底盘can总线,终端设备通过与车辆底盘can总线的连接,可以从车辆底盘can总线上获取到eps反馈的自检状态。eps反馈自检状态的信号可以表示如下:
53.eps2_pa_available=1
54.eps反馈的自检状态如上为1时,表示eps为可用状态,如果反馈的自检状态不为1,例如为0,则表示不可用状态。如果终端设备接收到eps反馈的自检状态为不可用状态,则与eps握手失败。
55.步骤240,在所述自检状态为eps可用状态时,通过与所述车辆底盘can总线的连接,向所述eps发送握手信号。
56.终端设备在接收到eps反馈的自检状态为eps可用状态时,可以通过与车辆底盘can总线的连接,向车辆底盘can总线发送与eps的握手信号。终端设备发送的与eps的握手信号可以表示为:adcs11_pa_epsanglereqst=1。
57.步骤250,通过与所述车辆底盘can总线的连接,接收所述eps发送的握手反馈信号。
58.eps在车辆底盘can总线中接收到握手信号后,进行反馈,将握手反馈信号发送至车辆底盘can总线上。终端设备通过与车辆底盘can总线的连接,从车辆底盘can上获取到eps反馈的握手反馈信号。eps反馈的握手反馈信号可以表示如下:
59.eps_adas_strangres=1
60.如果接收到的eps反馈的握手反馈信号如上为1,则为握手成功信号,确定握手成功,如果握手反馈信号为其他信号,则握手失败。
61.在本技术的一个实施例中,在所述接收所述eps发送的握手反馈信号之后,还包括:在所述握手反馈信号为握手成功信号时,点亮所述eps控制界面中的指示灯。
62.eps控制界面中还包括指示灯。终端设备在接收到的eps反馈的握手反馈信号为握手成功信号时,点亮eps控制界面中的指示灯,用于提示用户已握手成功。
63.步骤220-步骤250可以通过状态机和时序来控制信号的发送,这样可以自动发送信号,避免了人工控制每个信号的发送。
64.步骤260,在所述握手反馈信号为握手成功信号时,响应于对键盘中第一预设按键的触发指令,确定方向盘旋转方向和转角,并生成包括所述方向盘旋转方向和转角的调试指令。
65.在握手反馈信号为握手成功信号时,确定与eps握手成功,可以进入线控状态。这时用户可以触发键盘中的第一预设按键,来控制方向盘的旋转方向和转角。第一预设按键可以包括两个按键,用于控制不同旋转方向的转角,例如可以使用a键和d键来控制,a键被触发时,表示左打方向盘,每点击一下左打一定的转角,比如10度,d键被触发时表示右打方向盘,每点击一下右打一定的转角,比如10度。
66.在检测到用户对第一预设按键的触发指令时,根据触发指令所针对的目标第一预设按键,确定方向盘旋转方向,并根据对目标第一预设按键的触发次数,确定方向盘的转角。例如,目标第一预设按键为a键,触发次数为3次,触发一次对应的转角为10度,则可以确定方向盘旋转方向为左打方向盘,左打方向盘的转角为30度。在确定方向盘旋转方向和转角后,生成包括方向盘旋转方向和转角的调试指令。
67.步骤270,将所述调试指令发送至所述线控系统控制单元,所述调试指令用于指示所述线控系统控制单元执行所述调试指令,控制线控系统执行所述调试指令所对应的操作。
68.通过与车辆底盘can总线的连接,将包括方向盘旋转方向和转角的调试指令发送至车辆底盘can总线上,eps可以从车辆底盘can总线上获取到该包括方向盘旋转方向和转角的调试指令,并控制方向盘按照所述旋转方向旋转,旋转的角度为所述转角,用户在操作键盘控制方向盘旋转方向和转角后,可以观察车辆方向盘的旋转。
69.本实施例提供的线控系统调试方法,通过在接收到握手控制指令时,向eps发送握手请求信号,并接收eps反馈的自检状态,在自检状态为eps可用状态时,可以自动向eps发送握手信号,并接收eps发送的握手反馈信号,在握手反馈信号为握手成功信号时,可以基于键盘来接收到方向盘旋转方向和转角,并生成包括方向盘旋转反向和转角的调试指令,将调试指令发送至eps,整个过程中用户只需要触发握手控制指令,便可以实现与eps的自动握手调试,握手成功后,用户可以通过键盘控制方向盘进行旋转,实现了对eps的自动调试,全程自动化程度较高,可以提高开发调试效率,而且可以单独对eps进行调试控制,便于发现eps存在的问题,精确性较高,而且系统成本较低,新手通过操作界面也很容易上手。
70.在上述技术方案的基础上,在所述确定方向盘旋转方向和转角之后,还包括:在所述eps控制界面中显示所述方向盘旋转方向和转角。
71.控制界面中还可以包括方向盘给定转角显示窗口,在基于用户对第一预设按键的触发指令确定方向盘方向和转角后,在方向盘给定转角显示窗口显示确定的方向盘旋转方向和转角,方向盘方向可以用正负号来表示,例如,正号可以表示右打方向盘,负号可以表示左打方向盘。通过在eps控制界面中显示方向盘旋转方向和转角,用户可以看到已经给出的方向盘方向和转角。
72.在上述技术方案的基础上,在所述将所述调试指令发送至所述线控系统控制单元之后,还包括:接收所述eps反馈的方向盘实际旋转方向和实际转角,并在所述eps控制界面中显示所述实际旋转方向和实际转角。
73.在将包括方向盘旋转方向和转角的调试指令发送至eps后,eps控制方向盘向所述
旋转方向旋转,旋转的角度为所述转角,并获取方向盘当前的实际旋转方向和实际转角,将方向盘实际旋转方向和实际转角通过车辆底盘can总线发送至终端设备,终端设备接收eps反馈的方向盘实际旋转方向和实际转角。在eps控制界面中还包括方向盘实际转角显示窗口,在方向盘实际转角显示窗口显示eps反馈的方向盘实际旋转方向和实际转角,在方向盘实际转角显示窗口显示方向盘实际旋转方向和实际转角,方向盘实际旋转方向可以用正负号来表示,例如,正号可以表示右打方向盘,负号可以表示左打方向盘。通过在eps控制界面中显示方向盘实际旋转方向和转角,用户可以看到在给定的方向盘旋转方向和转角下,方向盘实际旋转情况,便于了解到eps控制情况。
74.在上述技术方案的基础上,所述方法还包括:通过所述eps控制界面接收目标eps测试模式,所述目标eps测试模式包括键盘控制模式、阶跃响应模式、斜坡响应模式或正弦响应模式;
75.所述在与所述线控系统控制单元握手成功后,接收对所述线控系统控制单元的调试指令,包括:在与所述eps握手成功后,在所述目标eps测试模式为阶跃响应模式、斜坡响应模式或正弦响应模式时,通过所述目标eps测试模式所对应的输入框获取方向盘的调试指令。
76.在eps控制界面中还包括性能测试界面,在性能测试界面中可以选择eps测试模式,eps测试模式包括键盘控制模式、阶跃响应模式、斜坡响应模式和正弦响应模式。其中,键盘控制模式就是上述的通过第一预设按键来控制方向盘方向和转角的模式,键盘控制模式作为默认模式。对于阶跃响应模式、斜坡响应模式和正弦响应模式分别有对应的输入框,用于供用户输入方向盘旋转方向和转角。在阶跃响应模式下,用户可以在阶跃响应模式对应的输入框中输入一个方向盘转角(范围
±
500
°
),之后可以观察方向盘的响应情况,例如,输入的方向盘转角可以是10
°
、50
°
、100
°
、300
°
、500
°
、-10
°
、-50
°
、100
°
、-300
°
、-500
°
,当然,也可以输入其他转角,其中正数可以表示右打方向盘,负数可以表示左打方向盘。在斜坡响应模式下,用户可以斜坡响应模式对应的输入框中输入方向盘每个周期的增量,之后可以观察方向盘的响应情况,例如,输入的增量可以是2
°
、4
°
、5
°
、6
°
、8
°
,当然,也可以输入其他转角增量。在正弦响应模式下,输出的是正弦函数状的方向盘转角,正弦响应模式对应有两个输入框,分别是幅值输入框和频率输入框,幅值输入框用于供用户输入正弦函数的幅值,例如可以输入10
°
、50
°
、100
°
、300
°
、500
°
等,频率输入框用于供用户输入方向盘的旋转速度,例如可以输入2、3、4、5、6,其中,输入n相当于n秒打了方向盘一个8字来回,也就是4*幅值这么大的角度。
77.在性能测试界面中包括模式选择控件,模式选择控件可以是下拉菜单或者拉横轴的形式,可以使用不同的数字标识来表示各个模式,例如可以用0表示键盘控制模式,用1表示阶跃响应模式,用2表示斜坡响应模式,用3表示正弦响应模式。在eps控制界面中,通过性能测试界面中的模式选择控件获取用户选择的目标eps测试模式,如果用户没有选择eps测试模式,则默认目标eps测试模式为键盘控制模式,如果用户选择的目标eps测试模式为阶跃响应模式、斜坡响应模式或正弦响应模式,则在与eps握手成功后,将目标eps测试模式所对应的输入框中的数据作为方向盘的调试指令,并将调试指令发送至eps,之后可以观察eps控制方向盘的响应情况。
78.需要说明的是,用户在选择目标eps测试模式之前,可以先在目标eps测试模式对
应的输入框中输入对应的值,这样可以避免出现错误控制。
79.通过在eps控制界面中设置多种eps测试模式供用户选择,可以满足用户对不同测试模式的需求,实现对eps全方位的调试。
80.图3是本技术实施例中eps控制界面的示意图,如图3所示,eps控制界面可以包括使能按钮31、指示灯32、方向盘给定转角显示窗口33、方向盘实际转角显示窗口34、性能测试界面35,性能测试界面35中包括模式选择控件351、阶跃响应对应的输入框352、斜坡响应对应的输入框353、正弦响应对应的幅值输入框354和频率输入框355。其中,使能按钮31用于接收握手控制指令,指示灯32用于进行握手成功提示,方向盘给定转角显示窗口33用于显示用户给定的方向盘转角,方向盘实际转角显示窗口34用于显示实际的方向盘转角,性能测试界面35中各个部分可参考上文描述,这里不再赘述。
81.图4是本技术实施例提供的一种线控系统调试方法的流程图,本实施例中以对vcu进行联调的过程进行说明,所述线控系统控制单元包括vcu,所述操作界面包括vcu控制界面。如图4所示,该方法包括:
82.步骤410,通过操作界面接收与线控系统控制单元的握手控制指令。
83.vcu控制界面中包括使能按钮,在检测到用户对该使能按钮的触发操作时,确定接收到与vcu的握手控制指令。
84.步骤420,响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,向所述vcu发送握手请求信号。
85.在接收到与vcu的握手控制指令时,向车辆底盘can总线发送与vcu的握手请求信号,车辆中的vcu可以从车辆底盘can总线上获取到该握手请求信号。
86.步骤430,通过与所述车辆底盘can总线的连接,接收所述vcu反馈的自检状态,并接收idb综合电子制动器发送的车辆状态。
87.vcu接收到握手请求信号后,对自身状态进行自检,得到自检状态,将自检状态发送至车辆底盘can总线,终端设备通过与车辆底盘can总线的连接,可以从车辆底盘can总线上获取到vcu反馈的自检状态。vcu反馈自检状态的信号可以表示如下:
88.vcu14_paavailable=0
89.vcu反馈的自检状态如上为0时,表示vcu为可用状态,如果反馈的自检状态不为0,例如为1,则表示不可用状态。如果终端设备接收到vcu反馈的自检状态为不可用状态,则与vcu握手失败。
90.idb按照一定频率获取车辆状态,并将车辆状态通过车辆底盘can总线发送至终端设备,车辆状态包括静止状态和行驶状态,车辆状态为静止状态时,idb发送的车辆状态的信号可以表示如下:
91.idb9_pastandstill=1
92.如果idb发送的车辆状态如上为1时,表示车辆状态为静止状态,如果车辆状态为其他值,则表示车辆状态为非静止状态,例如为行驶状态。
93.步骤440,在所述自检状态为vcu可用状态且所述车辆状态为静止状态时,通过与所述车辆底盘can总线的连接,向所述vcu发送握手信号。
94.终端设备在接收到vcu反馈的自检状态为vcu可用状态,且idb发送的车辆状态为静止状态时,可以通过与车辆底盘can总线的连接,向车辆底盘can总线发送与vcu的握手信
号。终端设备发送的与vcu的握手信号可以表示为:adcs11_pa_gearreq=1。
95.步骤450,通过与所述车辆底盘can总线的连接,接收所述vcu发送的握手反馈信号。
96.vcu在车辆底盘can总线中接收到握手信号后,进行反馈,将握手反馈信号发送至车辆底盘can总线上。终端设备通过与车辆底盘can总线的连接,从车辆底盘can总线上获取到vcu反馈的握手反馈信号。vcu反馈的握手反馈信号可以表示如下:
97.vcu14_paactive=1
98.如果接收到的vcu反馈的握手反馈信号如上为1,则为握手成功信号,确定握手成功,如果握手反馈信号为其他信号,则握手失败。
99.在本技术的一个实施例中,在所述接收所述vcu发送的握手反馈信号之后,还包括:在所述握手反馈信号为握手成功信号时,点亮所述vcu控制界面中的指示灯。
100.vcu控制界面中还包括指示灯。终端设备在接收到的vcu反馈的握手反馈信号为握手成功信号时,点亮vcu控制界面中的指示灯,用于提示用户已与vcu握手成功。
101.步骤420-步骤450可以通过状态机和时序来控制与vcu握手过程中信号的发送,这样可以自动发送信号,避免了人工控制每个信号的发送,可以提高与vcu的握手调试效率。
102.步骤460,在所述握手反馈信号为握手成功信号时,通过所述vcu控制界面中的档位输入框接收目标档位,并生成包括所述目标档位的调试指令。
103.vcu控制界面中还包括档位输入框,用于供用户输入目标档位,档位可以包括p档、r档、n档、d档,用户可以输入其中一个档位作为目标档位。在vcu反馈的握手反馈信号为握手成功信号时,点亮vcu控制界面中的指示灯,以提示用户已与vcu握手成功,用户可以在vcu控制界面中的档位输入框输入目标档位,终端设备接收到用户输入的目标档位,生成包括目标档位的调试指令。生成的包括目标档位的调试指令可以表示如下:
104.adcs11_pa_gearposreq=x
105.其中,x可以是用户输入的具体的目标档位所对应的数字标识。
106.步骤470,将所述调试指令发送至所述线控系统控制单元,所述调试指令用于指示所述线控系统控制单元执行所述调试指令,控制线控系统执行所述调试指令所对应的操作。
107.通过与车辆底盘can总线的连接,将包括目标档位的调试指令发放至车辆底盘can总线上,vcu可以从车辆底盘can总线上获取到该包括目标档位的调试指令,并控制换挡机构切换至目标档位,用户在档位输入框输入目标档位后,可以观察车辆档位的切换情况。
108.图5是本技术实施例中vcu控制界面的示意图,如图5所示,vcu控制界面可以包括使能按钮51、指示灯52、档位输入框53,还可以包括档位说明54,其中,使能按钮51用于接收与vcu的握手控制指令,指示灯52用于进行握手成功提示,档位输入框53用于供用户输入目标档位,档位说明54用于说明数字标识与档位的对应关系,例如输入1表示p档,输入2表示r档,输入3表示n档,输入4表示d档。
109.本实施例提供的线控系统调试方法,通过在接收到对vcu的握手控制指令时,向vcu发送握手请求信号,并接收vcu反馈的自检状态以及idb发送的车辆状态,在自检状态为vcu可用状态且车辆状态为静止状态时,可以自动向vcu发送握手信号,并接收vcu发送的握手反馈信号,在握手反馈信号为握手成功信号时,可以通过档位输入框接收目标档位,并生
成包括目标档位的调试指令,将调试指令发送至vcu,整个过程中用户只需要触发握手控制指令,便可以实现与vcu的自动握手调试,握手成功后,用户可以通过档位输入框输入目标档位,实现了对vcu的自动调试,全程自动化程度较高,可以提高开发调试效率,而且可以单独对vcu进行调试控制,便于发现vcu存在的问题,精确性较高,而且系统成本较低,新手通过操作界面也很容易上手。
110.图6是本技术实施例提供的一种线控系统调试方法的流程图,本实施例中以对idb进行联调的过程进行说明,所述线控系统控制单元包括idb,所述操作界面包括idb控制界面。如图6所示,该方法包括:
111.步骤610,通过操作界面接收与线控系统控制单元的握手控制指令。
112.idb控制界面中包括使能按钮,在检测到用户对该使能按钮的触发操作时,确定接收到与idb的握手控制指令。
113.步骤620,响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,向所述idb发送握手请求信号。
114.在接收到与idb的握手控制指令时,向车辆底盘can总线发送与idb的握手请求信号,车辆中的idb可以从车辆底盘can总线上获取到该握手请求信号。
115.步骤630,通过与所述车辆底盘can总线的连接,接收所述idb反馈的自检状态,并接收所述idb发送的车辆状态。
116.idb接收到握手请求信号后,对自身状态进行自检,得到自检状态,将自检状态发送至车辆底盘can总线,终端设备通过与车辆底盘can总线的连接,可以从车辆底盘can总线上获取到idb反馈的自检状态。idb反馈自检状态的信号可以表示如下:
117.idb9_pa_parkingavailable=0
118.idb反馈的自检状态如上为0时,表示idb为可用状态,如果反馈的自检状态不为0,例如为1,则表示不可用状态。如果终端设备接收到idb反馈的自检状态为不可用状态,则与idb握手失败。
119.idb按照一定频率获取车辆状态,并将车辆状态通过车辆底盘can总线发送至终端设备,车辆状态包括静止状态和行驶状态,车辆状态为静止状态时,idb发送的车辆状态的信号可以表示如下:
120.idb9_pastandstill=1
121.如果idb发送的车辆状态如上为1时,表示车辆状态为静止状态,如果车辆状态为其他值,则表示车辆状态为非静止状态,例如为行驶状态。
122.步骤640,在所述自检状态为idb可用状态且所述车辆状态为静止状态时,通过与所述车辆底盘can总线的连接,向所述idb发送握手信号。
123.终端设备在接收到idb反馈的自检状态为idb可用状态,且idb发送的车辆状态为静止状态时,可以通过与车辆底盘can总线的连接,向车辆底盘can总线发送与idb的握手信号。终端设备发送的与idb的握手信号可以表示为:adcs11_pa_idbcontrolreq=1。
124.步骤650,通过与所述车辆底盘can总线的连接,接收所述idb发送的握手反馈信号。
125.idb在车辆底盘can总线中接收到握手信号后,进行反馈,将握手反馈信号发送至车辆底盘can总线上。终端设备通过与车辆底盘can总线的连接,从车辆底盘can总线上获取
到idb反馈的握手反馈信号。idb反馈的握手反馈信号可以表示如下:
126.idb9_pa_apactrlsts=1
127.如果接收到的idb反馈的握手反馈信号如上为1,则为握手成功信号,确定握手成功,如果握手反馈信号为其他信号,则握手失败。
128.在本技术的一个实施例中,在所述接收所述idb发送的握手反馈信号之后,还包括:在所述握手反馈信号为握手成功信号时,点亮所述idb控制界面中的指示灯。
129.idb控制界面中还包括指示灯。终端设备在接收到的idb反馈的握手反馈信号为握手成功信号时,点亮idb控制界面中的指示灯,用于提示用户已与idb握手成功。
130.步骤660,在所述握手反馈信号为握手成功信号时,通过与所述车辆底盘can总线的连接,向所述idb发送加速度建压信号。
131.在idb发送的握手反馈信号为握手成功信号时,通过与车辆底盘can总线的连接,终端设备向idb发送加速度建压信号,加速度建压信号可以包括多个信号,表示如下:
132.adcs11_pa_stopreq=1;
133.adcs11_pa_idbcontrolreq=2;//assist
134.adcs11_pa_tardecelreq=1;
135.第一个信号为车辆刹停信号,第二个信号为智能驾驶控制idb的状态,第三个信号为加速度有效位。
136.步骤670,在接收到所述idb反馈的建压完成信号时,向所述idb发送epb释放指令。
137.idb接收到终端设备发送的加速度建压信号后,执行建压操作,在建压完成后,反馈建压完成信号至车辆底盘can总线,idb反馈的建压完成信号表示如下:
138.idb9_pa_apactrlsts=4
139.若接收到上述建压完成信号,说明idb已完成建压,可以释放epb(electrical park brake,电子驻车制动系统)。
140.终端设备从车辆底盘can总线上获取到idb反馈的建压完成信号后,向idb发送epb释放指令,以指示idb释放epb,epb释放指令表示如下:adcs11_pa_epbreq=1。
141.步骤680,接收所述idb反馈的epb释放完成信号。
142.idb接收到终端设备发送的epb释放指令后,执行epb的释放操作,在epb释放完成后,反馈epb释放完成信号,通过与车辆底盘can总线的连接,终端设备接收到idb反馈的epb释放完成信号。idb反馈的epb释放完成信号可以包括多个信号,表示如下:
143.idb6_epbstatus=1;(epb释放)
144.idb1_brakepedalapplied=0;(刹车踏板没有被踩下)
145.idb9_pa_apactrlsts=2(idb的泊车状态信号,2代表车速控制)。
146.在接收到上述epb释放完成信号时,终端设备和idb的起步前握手和释放epb操作已经完成,可以进行加减速度控制。
147.步骤620-步骤680可以通过状态机和时序来控制与idb握手过程中信号的发送以及建压过程信号的发送,这样可以自动发送信号,避免了人工控制每个信号的发送,可以提高与idb的握手调试效率。
148.步骤690,在接收到所述epb释放完成信号后,响应于对键盘中第二预设按键的触发指令,确定加速度值和加速度方向,并生成包括所述加速度值和加速度方向的调试指令。
149.终端设备在接收到epb释放完成信号后,确定可以进入加减速度控制状态。这时用户可以触发键盘中的第二预设按键,来控制加速度值和加速度方向,加速度方向可以包括加速度或者减速度。第二预设按键可以包括两个按键,用于控制不同加速度方向的加速度值,例如可以使用w键和s键来控制,w键被触发时,表示加速度,每点击一下往上加一定的加速度值,比如0.05m/s2,s键被触发时表示减速度,每点击一下往下减一定的加速度值,比如0.05m/s2。本技术实施例用于对低速泊车时的调试,加速度值一般不会太大,可以设置最大的加速度值和最大的减速度值,例如最大的加速度值可以是1,最大的减速度值可以是3。
150.在检测到用户对第二预设按键的触发指令时,根据触发指令所针对的目标第二预设按键,确定加速度方向是加速度还是减速度,并根据对目标第二预设按键的触发次数,确定加速度值。例如,目标第二预设按键为s键,触发次数为3次,触发一次加速度值为0.05m/s2,则可以确定加速度方向为减速度,加速度值为0.15m/s2。在确定加速度值和加速度方向后,生成包括加速度值和加速度方向的调试指令。包括加速度值和加速度方向的调试指令表示如下:
151.adcs11_pa_idbcontrolreq=1;(智能驾驶控制idb的状态)
152.adcs11_pa_stopreq=0;(车辆刹停信号)
153.adcs11_pa_tardecel=xxx;(加速度值)
154.adcs11_pa_epbreq=0;(释放电子手刹信号有效)。
155.在本技术的一个实施例中,在所述确定加速度值和加速度方向之后,还包括:在所述idb控制界面中显示所述加速度值和加速度方向。
156.在idb控制界面中还包括加速度给定显示窗口,加速度给定显示窗口用于显示用户通过触发第二预设按键给出的加速度值和加速度方向,例如可以用正数表示加速度,用负数表示减速度。通过在idb控制界面中显示加速度值和加速度方向,可以提醒到用户已给出的加速度值和加速度方向,便于用户观察车辆加减速度情况。
157.步骤6100,将所述调试指令发送至所述线控系统控制单元,所述调试指令用于指示所述线控系统控制单元执行所述调试指令,控制线控系统执行所述调试指令所对应的操作。
158.通过与车辆底盘can总线的连接,将包括加速度值和加速度方向的调试指令发放至车辆底盘can总线上,idb可以从车辆底盘can总线上获取到该包括加速度值和加速度方向的调试指令,并控制加减速度系统根据加速度值和加速度方向进行加速或减速。用户在键盘中触发第二预设按键后,可以观察车辆的加减速情况。
159.本实施例提供的线控系统调试方法,通过在接收到对idb的握手控制指令时,向idb发送握手请求信号,并接收idb反馈的自检状态以及车辆状态,在自检状态为idb可用状态且车辆状态为静止状态时,可以自动向idb发送握手信号,并接收idb发送的握手反馈信号,在握手反馈信号为握手成功信号时,可以向idb发送加速度建压信号,在接收到idb反馈的建压完成信号时,向idb发送epb释放指令,接收idb反馈的释放完成信号,整个过程中用户只需要触发握手控制指令,便可以实现与idb的自动握手调试以及epb释放操作,epb释放完成后,用户可以通过触发键盘中第二预设按键来控制加减速度,实现了对idb加减速度的自动调试,全程自动化程度较高,可以提高开发调试效率,而且可以单独对idb进行调试控制,便于发现idb存在的问题,精确性较高,而且系统成本较低,新手通过操作界面也很容易
上手。
160.在上述技术方案的基础上,在所述将所述调试指令发送至所述线控系统控制单元之后,还包括:响应于对所述idb控制界面中第一刹停控制按钮的触发操作,通过与所述车辆底盘can总线的连接,向所述idb发送刹停控制信号;接收所述idb反馈的车辆停止信号。
161.idb控制界面中还包括第一刹停控制按钮(也可以叫stop按钮),第一刹停控制按钮的作用是建压刹停车辆。在检测到用户触发idb控制界面中的第一刹停控制按钮后,终端设备通过与车辆底盘can总线的连接,将刹停控制信号发送至车辆底盘can总线上,idb可以从车辆底盘can总线上获取到该刹停控制信号,并对车辆进行刹车控制,在车辆停止后,反馈车辆停止信号。
162.终端设备发送的刹停控制信号可以表示如下:
163.adcs11_pa_stopreq=1;(车辆刹停信号)
164.adcs11_pa_idbcontrolreq=2;//assist(智能驾驶控制idb的状态)
165.adcs11_pa_tardecelreq=1;(加速度有效位)
166.adcs11_pa_tardecel=xxx;(控制加减速度为0)
167.车辆停止后,idb反馈的车辆停止信号表示如下:
168.idb9_pa_apactrlsts=4;(建压完成)
169.idb9_pastandstill=1;(车辆停止)。
170.通过第一刹停按钮刹停车辆后,不会退出线控状态,用户还可以换挡操作,再接着控车走。
171.通过idb控制界面中的第一刹停控制按钮,用户可以快速控制刹停车辆,刹停车辆后还可以换挡操作。
172.在上述技术方案的基础上,在所述将所述调试指令发送至所述线控系统控制单元之后,还包括:响应于对所述idb控制界面中第二刹停控制按钮的触发操作,通过与所述车辆底盘can总线的链接,向所述idb发送刹停控制信号;在接收到所述idb反馈的车辆停止信号后,向所述idb发送手刹拉起控制信号;在接收到所述idb反馈的手刹拉起状态信号后,执行与所述idb的握手退出操作。
173.idb控制界面中还包括第二刹停控制按钮(也可以叫exit按钮),第二刹停控制按钮的作用是刹停车辆、挂p档拉手刹并退出线控状态。在检测到用户触发idb控制界面中的第二刹停控制按钮后,终端设备通过与车辆底盘can总线的连接,将刹停控制信号发送至车辆底盘can总线上;idb可以从车辆底盘can总线上获取到该刹停控制信号,并对车辆进行刹车控制,在车辆停止后,反馈车辆停止信号;终端设备接收到idb反馈的车辆停止信号后,向idb发送手刹拉起控制信号;idb接收到终端设备发送的手刹拉起控制信号后,控制拉起手刹,并在拉起手刹后,反馈手刹拉起状态信号;终端设备接收到idb反馈的手刹拉起状态信号后,退出与idb的握手。
174.终端设备发送的刹停控制信号表示如下:
175.adcs11_pa_stopreq=1;(车辆刹停信号)
176.adcs11_pa_idbcontrolreq=2;//assist(智能驾驶控制idb的状态)
177.adcs11_pa_tardecelreq=1;(加速度有效位)
178.adcs11_pa_tardecel=xxx;(控制加减速度为0)
179.车辆停止后,idb反馈的车辆停止信号表示如下:
180.idb9_pa_apactrlsts=4;(建压完成)
181.idb9_pastandstill=1;(车辆停止)。
182.终端设备发送的手刹拉起控制信号表示如下:
183.adcs11_pa_epbreq=2;(拉手刹)
184.idb反馈的收到拉起状态信号表示如下:
185.idb6_epbstatus=2;(手刹拉起)
186.终端设备接收到idb反馈的手刹拉起状态信号后,执行与idb的握手退出操作,发送的信号表示如下:
187.adcs11_pa_stopreq=0;
188.adcs11_pa_idbcontrolreq=0;
189.adcs11_pa_tardecelreq=0;
190.adcs11_pa_tardecel=0;
191.adcs11_pa_epbreq=0;
192.通过发送上述信号,退出与idb的握手。
193.通过idb控制界面中的第二刹停控制按钮,用户可以快速控制刹停车辆,并退出与idb的握手,即退出idb的线控状态。
194.在上述技术方案的基础上,所述方法还包括:通过所述idb控制界面接收目标加速度测试模式,所述目标加速度测试模式包括键盘控制模式、阶跃响应模式、斜坡响应模式或正弦响应模式;
195.所述在与所述线控系统控制单元握手成功后,接收对所述线控系统控制单元的调试指令,包括:在与所述idb握手成功后,在所述目标加速度测试模式为阶跃响应模式、斜坡响应模式或正弦响应模式时,通过所述目标加速度测试模式所对应的输入框获取加速度的调试指令。
196.在idb控制界面中还包括加速度性能测试界面,在加速度性能测试界面中可以选择加速度测试模式,加速度测试模式可以包括键盘控制模式、阶跃响应模式、斜坡响应模式和正弦响应模式。其中,键盘控制模式就是上述的通过第二预设按键来控制加速度值和加速度方向的模式,键盘控制模式作为默认模式。对于阶跃响应模式、斜坡响应模式和正弦响应模式分别有对应的输入框,用于供用户输入加速度或减速度。在阶跃响应模式下,用户可以在阶跃响应模式对应的输入框中输入一固定加速度,之后可以观察车辆加速度的响应情况,例如,在d档时可以输入0.3m/s2、0.6m/s2、0.9m/s2、1.2m/s2、1.5m/s2、1.8m/s2、2.1m/s2等,在r档时可以输入-0.3m/s2、-0.6m/s2、-0.9m/s2、-1.2m/s2、-1.5m/s2、-1.8m/s2、-2.1m/s2等,当然也可以输入其他值。在斜坡响应模式下,用户可以在斜坡响应模式对应的输入框中输入每个周期加速度的增量,之后可以观察车辆加速度的响应情况,例如,在d档时输入的增量可以是0.001m/s2、0.005m/s2、0.01m/s2、0.02m/s2、0.03m/s2,在r档时输入的增量可以是-0.001m/s2、-0.005m/s2、-0.01m/s2、-0.02m/s2、-0.03m/s2,当然,也可以输入其他加速度增量。在正弦响应模式下,输出的是正弦函数状的加减速度给定,正弦响应模式对应有两个输入框,分别是幅值输入框和频率输入框,幅值输入框用于供用户输入正弦函数的幅值,例如可以输入0.5、1.0、1.5,频率输入框用于供用户输入加速度变换的周期,例如可以输入
0.5、1、2、3、4。
197.在加速度性能测试界面中包括模式选择控件,模式选择控件可以是下拉菜单或者拉横轴的形式,可以使用不同的数字标识来表示各个模式,例如可以用0表示键盘控制模式,用1表示阶跃响应模式,用2表示斜坡响应模式,用3表示正弦响应模式。在idb控制界面中,通过加速度性能测试界面中的模式选择控件获取用户选择的目标加速度测试模式,如果用户没有选择加速度测试模式,则默认目标加速度测试模式为键盘控制模式,如果用户选择的目标加速度测试模式为阶跃响应模式、斜坡响应模式或正弦响应模式,则在与idb握手成功并释放epb后,将目标加速度测试模式所对应的输入框中的数据作为加速度的调试指令,并将调试指令发送至idb,之后可以观察idb控制加减速度的响应情况。
198.需要说明的是,用户在选择目标加速度测试模式之前,可以先在目标加速度测试模式对应的输入框中输入对应的值,这样可以避免出现错误控制。
199.通过在idb控制界面中设置多种加速度测试模式供用户选择,可以满足用户对不同加速度测试模式的需求,实现对idb加减速度全方位的调试。
200.图7是本技术实施例提供的一种线控系统调试方法的流程图,本实施例中以对idb进行联调的过程进行说明,所述线控系统控制单元包括idb,所述操作界面包括idb控制界面。如图7所示,该方法包括:
201.步骤710,通过操作界面接收与线控系统控制单元的握手控制指令。
202.步骤720,响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,向所述idb发送握手请求信号。
203.步骤730,通过与所述车辆底盘can总线的连接,接收所述idb反馈的自检状态,并接收所述idb发送的车辆状态。
204.步骤740,在所述自检状态为idb可用状态且所述车辆状态为静止状态时,通过与所述车辆底盘can总线的连接,向所述idb发送握手信号。
205.步骤750,通过与所述车辆底盘can总线的连接,接收所述idb发送的握手反馈信号。
206.步骤710-步骤750分别与步骤610-步骤650的内容相同,这里不再赘述。
207.步骤760,在所述握手反馈信号为握手成功信号时,响应于对扭矩控制按钮的触发操作,通过与所述车辆底盘can总线的连接,向所述idb发送扭矩控制建压信号。
208.idb控制界面中还包括扭矩控制界面,除了使用加速度控制车辆行驶外,还可以使用扭矩控制车辆行驶,默认使用加速度控制车辆,如果用户需要使用扭矩控制车辆,可以触发扭矩控制界面中的扭矩控制按钮。在idb发送的握手反馈信号为握手成功信号时,如果检测到用户对扭矩控制按钮的触发操作,则通过与车辆底盘can总线的连接,终端设备向idb发送扭矩控制建压信号,扭矩控制建压信号可以包括多个信号,表示如下:
209.adcs11_pa_stopreq=1;
210.adcs11_pa_idbcontrolreq=2;//assist
211.adcs11_pa_tardecelreq=0;
212.第一个信号为车辆刹停信号,第二个信号为智能驾驶控制idb的状态,第三个信号为扭矩有效位。
213.需要说明的是,如果需要对扭矩控制进行调试,需要将车辆档位调整为d档。
214.步骤770,在接收到所述idb反馈的建压完成信号时,向所述idb发送epb释放指令。
215.步骤770与步骤670的内容相同,这里不再赘述。
216.步骤780,接收所述idb反馈的epb释放完成信号。
217.步骤780与步骤680的内容相同,这里不再赘述。
218.步骤790,在接收到所述epb释放完成信号后,响应于对键盘中第三预设按键的触发指令,确定期望扭矩,并生成包括所述期望扭矩的调试指令。
219.终端设备在接收到epb释放完成信号后,确定可以进入扭矩控制状态。这时用户可以触发键盘中的第三预设按键,来控制增加或减少一个扭矩增量。第三预设按键可以包括两个按键,用于控制扭矩增量的增加或减少,第三预设按键可以和第二预设按键相同,例如可以使用w键和s键来控制扭矩,w键被触发时,表示增加扭矩增量,每点击一下增加一定的扭矩增量,s键被触发时减少扭矩增量,每点击一下减少一定的扭矩增量,增加或减少的扭矩增量可以由用户设置,也可以预先设置。本技术实施例用于对低速泊车时的调试,加速度值一般不会太大,可以设置最大的加速度值和最大的减速度值,例如最大的加速度值可以是1,最大的减速度值可以是3。在检测到用户对第三预设按键的触发指令时,根据触发指令所针对的目标第三预设按键,确定是增加扭矩增量还是减少扭矩增量,并根据对目标第三预设按键的触发次数,确定期望扭矩。例如,目标第二预设按键为s键,触发次数为3次,触发一次扭矩增量为5,则可以确定期望扭矩为减少15。在确定期望扭矩后,生成包括期望扭矩的调试指令。
220.步骤7100,将所述调试指令发送至所述线控系统控制单元,所述调试指令用于指示所述线控系统控制单元执行所述调试指令,控制线控系统执行所述调试指令所对应的操作。
221.通过与车辆底盘can总线的连接,将包括期望扭矩的调试指令发放至车辆底盘can总线上,idb可以从车辆底盘can总线上获取到该包括期望扭矩的调试指令,并控制车辆发动机根据期望扭矩进行行驶。用户在键盘中触发第三预设按键后,可以观察车辆的行驶情况。
222.本实施例提供的线控系统调试方法,通过在接收到对idb的握手控制指令时,向idb发送握手请求信号,并接收idb反馈的自检状态以及车辆状态,在自检状态为idb可用状态且车辆状态为静止状态时,可以自动向idb发送握手信号,并接收idb发送的握手反馈信号,在握手反馈信号为握手成功信号时,可以基于用户对扭矩控制按钮的触发操作,向idb发送扭矩控制建压信号,在接收到idb反馈的建压完成信号时,向idb发送epb释放指令,接收idb反馈的epb释放完成信号,整个过程中用户只需要触发握手控制指令,便可以实现与idb的自动握手调试以及epb释放操作,epb释放完成后,用户可以通过触发键盘中第三预设按键来进行扭矩控制,实现了对idb扭矩控制的自动调试,全程自动化程度较高,可以提高开发调试效率,而且可以单独对idb进行扭矩调试控制,便于发现idb存在的问题,精确性较高,而且系统成本较低,新手通过操作界面也很容易上手。
223.在上述技术方案的基础上,在所述确定期望扭矩之后,还包括:在所述idb控制界面中显示所述期望扭矩;
224.在所述将所述调试指令发送至所述线控系统控制单元之后,还包括:接收所述idb反馈的电机实际扭矩,并在所述idb控制界面中显示所述电机实际扭矩。
225.在idb控制界面中的扭矩控制界面中还包括扭矩给定显示窗口,扭矩给定显示窗口用于显示用户通过触发第三预设按键给出的期望扭矩,例如可以用正数表示增加扭矩,用负数表示减少扭矩。通过在idb控制界面中显示期望扭矩,可以提醒到用户已给出的期望扭矩,便于用户观察车辆基于给出的期望扭矩的行驶情况。
226.在idb控制界面中的扭矩控制界面中还包括扭矩反馈显示窗口,扭矩反馈显示窗口用于显示idb反馈的电机实际扭矩。在将包括期望扭矩的调试指令发送至idb后,idb基于期望扭矩控制电机旋转,并获取电机实际扭矩,将电机实际扭矩反馈至终端设备,终端设备接收到idb反馈的电机实际扭矩后,在扭矩控制界面的扭矩反馈显示窗口显示点击实际扭矩,便于用户了解到车辆基于期望扭矩进行控制得到的电机实际扭矩。需要说明的是,电机实际扭矩与期望扭矩可能会不完全一致,可以作为参考。
227.正常接收到idb的反馈,说明idb工作在正常状态,如果idb没有正常响应,说明idb反馈有问题,可以人工分析反馈信息可查看问题所在。
228.在上述技术方案的基础上,在所述响应于对键盘中第三预设按键的触发指令,确定期望扭矩之前,还包括:接收所述第三预设按键所对应的扭矩增量值;
229.响应于对键盘中第三预设按键的触发指令,确定期望扭矩,包括:响应于对所述第三预设按键的触发指令,确定对所述第三预设按键的触发次数,并根据所述触发次数和所述扭矩增量值,确定所述期望扭矩。
230.在idb控制界面中的扭矩控制界面中还包括扭矩增量设置窗口,扭矩增量设置窗口用于供用户设置触发一次第三预设按键所对应的扭矩增量值。通过扭矩增量设置窗口接收用户设置的第三预设按键所对应的扭矩增量值,响应于用户对第三预设按键的触发指令,确定用户对第三预设按键的触发次数,可以将触发次数与扭矩增量值的乘积作为增加或减少的期望扭矩。通过提供扭矩增量设置窗口来接收用户设置的扭矩增量值,便于用户设置不同的扭矩增量值,可以提高扭矩控制的调试效率。
231.图8是本技术实施例中idb控制界面的示意图,如图8所示,idb控制界面包括:使能按钮81、指示灯82、加速度给定显示窗口83、第一刹停控制按钮84、第二刹停控制按钮85、加速度性能测试界面86、扭矩控制界面87。其中,使能按钮81用于接收与idb的握手控制指令,指示灯82用于进行握手成功的提示,加速度给定显示窗口83用于显示用户给定的加速度值和加速度方向。第一刹停控制按钮84和第二刹停控制按钮85可参考上述对第一刹停控制按钮和第二刹停控制按钮的描述,这里不再赘述。加速度测试界面86中包括模式选择控件861、阶跃响应对应的输入框862、斜坡响应对应的输入框863、正弦响应对应的幅值输入框864和频率输入框865,加速度性能测试界面86中各个部分可参考上文描述,这里不再赘述。扭矩控制界面87包括扭矩控制按钮871、扭矩给定显示窗口872、扭矩反馈显示窗口873和扭矩增量设置窗口874,扭矩控制界面87中各个部分可参考上文描述,这里不再赘述。
232.在本技术的一个实施例中,所述操作界面包括工作模式控制界面;所述方法还包括:通过所述工作模式控制界面接收虚拟apa的工作模式,并将所述工作模式发送至所述车辆底盘can总线。
233.其中,所述虚拟apa即当前的终端设备模拟的apa。所述工作模式可以包括一级工作模式和二级工作模式。一级工作模式可以包括关闭(off)模式、待命(standby)模式、泊车(parking)模式和故障(failure)模式;二级工作模式为一级工作模式下更详细的工作模
式,用于控制安全车速,二级工作模式可以包括未激活(no request)模式、低速泊车(parking)模式、巡航(cruising)模式和代客泊车(avp)模式。
234.图9是本技术实施例中工作模式控制界面的示意图,如图9所示,工作模式控制界面包括一级工作模式设置窗口91和二级工作模式设置窗口92。一级工作模式设置窗口91用于供用户设置一级工作模式,用户可以输入数字标识来给定一级工作模式,例如可以用0表示关闭模式,用2表示待命模式,用3表示泊车模式,用10表示故障模式;二级工作模式设置窗口92用于供用户设置二级工作模式,用户可以输入数字标识来给定二级工作模式,例如可以用0表示未激活模式,用1表示低速泊车模式,用2表示巡航模式,用3表示代客泊车模式。
235.在对eps、vcu和idb进行调试之前,用户可以设置虚拟apa的工作模式,终端设备在工作模式控制界面中接收到用户设置的一级工作模式和二级工作模式,得到包括一级工作模式和二级工作模式的虚拟apa的工作模式,将工作模式发送至车辆底盘can总线,之后可以在该工作模式下对eps、vcu和idb中的至少一种进行调试。在正常工作模式下进行调试时,用户可以在一级工作模式下输入除故障模式外的其他模式,如果需要模拟故障状态时,可以在一级工作模式下输入故障模式,这样终端设备可以向eps和vcu发送故障状态,验收eps和vcu的响应。
236.向车辆底盘can总线发送工作模式时,对于一级工作模式的信号可以表示为adcs11_parking_worksts=xxx,这里的xxx是用户输入的一级工作模式所对应的数字标识;对于二级工作模式的信号可以表示为adcs11_pa_parkingfnmd=xxx,这里的xxx是用户输入的二级工作模式所对应的数字标识。
237.通过工作模式控制界面可以针对不同的工作模式对线控系统进行调试。
238.在本技术的一个实施例中,所述操作界面还包括apa故障模拟按钮;所述方法还包括:响应于对所述apa故障模拟按钮的触发操作,通过与所述车辆底盘can总线的连接,向idb发送虚拟apa的故障状态。
239.操作界面中还包括apa故障模拟按钮,用于模拟apa故障。在检测到用户对apa故障模拟按钮的触发操作时,通过与车辆底盘can总线的连接,向idb发送虚拟apa的故障状态。终端设备发送的虚拟apa的故障状态的信号可以表示如下:
240.adcs11_pa_idbcontrolreq=3;//模拟apa控制器故障
241.用户按下apa故障模拟按钮后可模拟apa控制器故障,向idb发送故障状态,可以验收idb对apa控制器故障的响应。
242.在本技术的一个实施例中,所述操作界面还包括重置按钮;所述方法还包括:响应于对所述重置按钮的触发操作,断开与所述线控系统控制单元的握手。
243.操作界面中还包括重置(reset)按钮,用于接收重置指令。在检测到用户对重置按钮的触发操作时,对终端设备模拟apa发送的所有信号都进行重置,并且断开与线控系统控制单元的所有握手。通过在操作界面中设置重置按钮,便于用户在调试过程中进行重置。
244.需要说明的是,上述的eps控制界面、vcu控制界面、idb控制界面、工作模式控制界面、apa故障模拟按钮和重置按钮可以显示在同一操作界面中,也可以显示在不同操作界面中。
245.图10是本技术实施例提供的一种线控系统调试装置的结构框图,该线控系统调试
装置应用于终端设备,所述终端设备和车辆底盘can总线连接,如图10所示,所述装置包括:
246.握手指令接收模块1010,用于通过操作界面接收与线控系统控制单元的握手控制指令;
247.握手模块1020,用于响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,与所述线控系统控制单元执行握手操作;
248.调试指令接收模块1030,用于在与所述线控系统控制单元握手成功后,接收对所述线控系统控制单元的调试指令;
249.调试指令发送模块1040,用于将所述调试指令发送至所述线控系统控制单元,所述调试指令用于指示所述线控系统控制单元执行所述调试指令,控制线控系统执行所述调试指令所对应的操作。
250.可选的,所述线控系统控制单元包括eps电动助力转向系统,所述操作界面包括eps控制界面;
251.所述握手模块包括:
252.第一握手请求发送单元,用于响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,向所述eps发送握手请求信号;
253.eps状态接收单元,用于通过与所述车辆底盘can总线的连接,接收所述eps反馈的自检状态;
254.第一握手信号发送单元,用于在所述自检状态为eps可用状态时,通过与所述车辆底盘can总线的连接,向所述eps发送握手信号;
255.第一握手反馈接收单元,用于通过与所述车辆底盘can总线的连接,接收所述eps发送的握手反馈信号。
256.可选的,所述装置还包括:
257.eps指示灯点亮模块,用于在所述握手反馈信号为握手成功信号时,点亮所述eps控制界面中的指示灯。
258.可选的,所述调试指令接收模块包括:
259.第一方向盘调试指令接收单元,用于在所述握手反馈信号为握手成功信号时,响应于对键盘中第一预设按键的触发指令,确定方向盘旋转方向和转角,并生成包括所述方向盘旋转方向和转角的调试指令。
260.可选的,所述装置还包括:
261.方向盘给定转角显示模块,用于在所述eps控制界面中显示所述方向盘旋转方向和转角。
262.可选的,所述装置还包括:
263.方向盘实际转角显示模块,用于接收所述eps反馈的方向盘实际旋转方向和实际转角,并在所述eps控制界面中显示所述实际旋转方向和实际转角。
264.可选的,所述装置还包括:
265.eps测试模式接收模块,用于通过所述eps控制界面接收目标eps测试模式,所述目标eps测试模式包括键盘控制模式、阶跃响应模式、斜坡响应模式或正弦响应模式;
266.所述调试指令接收模块包括:
267.第二方向盘调试指令接收单元,用于在与所述eps握手成功后,在所述目标eps测
试模式为阶跃响应模式、斜坡响应模式或正弦响应模式时,通过所述目标eps测试模式所对应的输入框获取方向盘的调试指令。
268.可选的,所述线控系统控制单元包括vcu车辆控制单元,所述操作界面包括vcu控制界面;
269.所述握手模块包括:
270.第二握手请求发送单元,用于响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,向所述vcu发送握手请求信号;
271.vcu状态接收单元,用于通过与所述车辆底盘can总线的连接,接收所述vcu反馈的自检状态,并接收idb综合电子制动器发送的车辆状态;
272.第二握手信号发送单元,用于在所述自检状态为vcu可用状态且所述车辆状态为静止状态时,通过与所述车辆底盘can总线的连接,向所述vcu发送握手信号;
273.第二握手反馈接收单元,用于通过与所述车辆底盘can总线的连接,接收所述vcu发送的握手反馈信号。
274.可选的,所述装置还包括:
275.vcu指示灯点亮单元,用于在所述握手反馈信号为握手成功信号时,点亮所述vcu控制界面中的指示灯。
276.可选的,所述调试指令接收模块包括:
277.档位指令接收单元,用于在所述握手反馈信号为握手成功信号时,通过所述vcu控制界面中的档位输入框接收目标档位,并生成包括所述目标档位的调试指令。
278.可选的,所述线控系统控制单元包括idb,所述操作界面包括idb控制界面;
279.所述握手模块包括:
280.第三握手请求发送单元,用于响应于所述握手控制指令,通过与所述车辆底盘can总线的连接,向所述idb发送握手请求信号;
281.idb状态接收单元,用于通过与所述车辆底盘can总线的连接,接收所述idb反馈的自检状态,并接收所述idb发送的车辆状态;
282.第三握手信号发送单元,用于在所述自检状态为idb可用状态且所述车辆状态为静止状态时,通过与所述车辆底盘can总线的连接,向所述idb发送握手信号;
283.第三握手反馈接收单元,用于通过与所述车辆底盘can总线的连接,接收所述idb发送的握手反馈信号。
284.可选的,所述装置还包括:
285.idb指示灯点亮模块,用于在所述握手反馈信号为握手成功信号时,点亮所述idb控制界面中的指示灯。
286.可选的,所述装置还包括:
287.第一建压信号发送模块,用于在所述握手反馈信号为握手成功信号时,通过与所述车辆底盘can总线的连接,向所述idb发送加速度建压信号;
288.第一epb释放指令发送模块,用于在接收到所述idb反馈的建压完成信号时,向所述idb发送epb释放指令;
289.第一释放完成信号接收模块,用于接收所述idb反馈的epb释放完成信号。
290.可选的,所述调试指令接收模块包括:
291.第一加速度调试指令接收单元,用于在接收到所述epb释放完成信号后,响应于对键盘中第二预设按键的触发指令,确定加速度值和加速度方向,并生成包括所述加速度值和加速度方向的调试指令。
292.可选的,所述装置还包括:
293.给定加速度显示模块,用于在所述idb控制界面中显示所述加速度值和加速度方向。
294.可选的,所述装置还包括:
295.第一刹停信号发送模块,用于响应于对所述idb控制界面中第一刹停控制按钮的触发操作,通过与所述车辆底盘can总线的连接,向所述idb发送刹停控制信号;
296.停止信号接收模块,用于接收所述idb反馈的车辆停止信号。
297.可选的,所述装置还包括:
298.第二刹停信号发送模块,用于响应于对所述idb控制界面中第二刹停控制按钮的触发操作,通过与所述车辆底盘can总线的链接,向所述idb发送刹停控制信号;
299.拉手刹信号发送模块,用于在接收到所述idb反馈的车辆停止信号后,向所述idb发送手刹拉起控制信号;
300.握手退出模块,用于在接收到所述idb反馈的手刹拉起状态信号后,执行与所述idb的握手退出操作。
301.可选的,所述装置还包括:
302.加速度模式接收模块,用于通过所述idb控制界面接收目标加速度测试模式,所述目标加速度测试模式包括键盘控制模式、阶跃响应模式、斜坡响应模式或正弦响应模式;
303.所述调试指令接收模块包括:
304.第二加速度调试指令接收单元,用于在与所述idb握手成功后,在所述目标加速度测试模式为阶跃响应模式、斜坡响应模式或正弦响应模式时,通过所述目标加速度测试模式所对应的输入框获取加速度的调试指令。
305.可选的,所述装置还包括:
306.第二建压信号发送模块,用于在所述握手反馈信号为握手成功信号时,响应于对扭矩控制按钮的触发操作,通过与所述车辆底盘can总线的连接,向所述idb发送扭矩控制建压信号;
307.第二epb释放指令发送模块,用于在接收到所述idb反馈的建压完成信号时,向所述idb发送epb释放指令;
308.第二释放完成信号接收模块,用于接收所述idb反馈的epb释放完成信号。
309.可选的,所述调试指令接收模块包括:
310.扭矩指令接收单元,用于在接收到所述epb释放完成信号后,响应于对键盘中第三预设按键的触发指令,确定期望扭矩,并生成包括所述期望扭矩的调试指令。
311.可选的,所述装置还包括:
312.期望扭矩显示模块,用于在所述idb控制界面中显示所述期望扭矩;
313.实际扭矩显示模块,用于接收所述idb反馈的电机实际扭矩,并在所述idb控制界面中显示所述电机实际扭矩。
314.可选的,所述装置还包括:
315.扭矩增量接收模块,用于接收所述第三预设按键所对应的扭矩增量值;
316.所述扭矩指令接收单元包括:
317.期望扭矩确定子单元,用于响应于对所述第三预设按键的触发指令,确定对所述第三预设按键的触发次数,并根据所述触发次数和所述扭矩增量值,确定所述期望扭矩。
318.可选的,所述操作界面包括工作模式控制界面;所述装置还包括:
319.虚拟apa模式发送模块,用于通过所述工作模式控制界面接收虚拟apa的工作模式,并将所述工作模式发送至所述车辆底盘can总线。
320.可选的,所述操作界面还包括apa故障模拟按钮;所述装置还包括:
321.虚拟apa故障发送模块,用于响应于对所述apa故障模拟按钮的触发操作,通过与所述车辆底盘can总线的连接,向idb发送虚拟apa的故障状态。
322.可选的,所述操作界面还包括重置按钮;所述装置还包括:
323.重置模块,用于响应于对所述重置按钮的触发操作,断开与所述线控系统控制单元的握手。
324.本技术实施例提供的线控系统调试装置,用于实现本技术实施例所述的线控系统调试方法的各步骤,装置的各模块的具体实施方式参见相应步骤,此处不再赘述。
325.本技术实施例提供的线控系统调试装置,通过操作界面接收与线控系统控制单元的握手控制指令,执行与线控系统控制单元的握手操作,在与线控系统控制单元握手成功后,接收对线控系统控制单元的调试指令,将调试指令发送至线控系统控制单元,线控系统控制单元可以控制线控系统执行相应的操作,通过操作界面便可以实现线控软件与对手件软件的联调,而且可以自动执行握手操作并发送调试指令,不需要人工控制每个信号的发送,可以提高联调效率。
326.图11是本技术实施例提供的一种终端设备的结构框图,如图11所示,该终端设备1100可以包括一个或多个处理器1110以及与处理器1110连接的一个或多个存储器1120。终端设备1100还可以包括输入接口1130和输出接口1140,用于与另一装置或系统进行通信。被处理器110执行的程序代码可存储在存储器1120中。
327.终端设备1100中的处理器1110调用存储在存储器1120的程序代码,以执行上述实施例中的线控系统调试方法。
328.本技术实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本技术实施例所述的线控系统调试方法的步骤。
329.本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。对于装置实施例而言,由于其与方法实施例基本相似,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
330.以上对本技术实施例提供的一种线控系统调试方法、装置、终端设备及存储介质进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
331.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到各实施方式可
借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件实现。基于这样的理解,上述技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行各个实施例或者实施例的某些部分所述的方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1