机房协作运维机器人和系统的制作方法
1.本发明涉及机房运维机器人的技术领域,尤其是涉及一种机房协作运维机器人和系统。
背景技术:
2.在机器人机房应用场景中,最为关键是需要帮助解决现有人员所面临的困境,比如目前机房现场维修工具的管理、机房内系列钥匙串的管理,对于一些无显示器的服务器,如果发生问题,运维人员需要专门从外部携带显示器进入机房,接入服务器进行检修,十分耗时耗力。对于设备检修人员来说,遇到解决不了的问题时,也无法及时获得现场或远程的解决方案。
技术实现要素:
3.本发明的目的在于提供一种机房协作运维机器人和系统,以缓解了现有技术中存在的维修工具管理以及解决方案无法及时获取的技术问题。
4.第一方面,本发明实施例提供了一种机房协作运维机器人,包括机器人主体、设置所述机器人主体内部的主控模块和人机协作模块;所述人机协作模块包括识别装置和提示装置;
5.所述识别装置,用于识别待取出物体的类别信息,并将所述类别信息发送至所述主控模块;
6.所述主控模块,用于根据所述类别信息,向所述提示装置发出相应的控制信号;
7.所述提示装置,用于根据所述控制信号,提示所述待取出物体的类别、所述待取出物体对应的应用设备以及所述应用设备在机房的设置位置。
8.结合第一方面,本发明实施例提供了第一方面的第一种可能的实施方式,其中,所述人机协作模块还包括工具箱和钥匙柜,所述识别装置还用于识别出来自于所述工具箱或所述钥匙柜的待取出物体的类别信息。
9.结合第一方面,本发明实施例提供了第一方面的第二种可能的实施方式,其中,所述识别装置设置于所述工具箱的箱门或所述钥匙柜的柜门上。
10.结合第一方面,本发明实施例提供了第一方面的第三种可能的实施方式,其中,还包括设置在所述机器人主体内部的监控模块,用于实时采集环境信息和待维护设备的运行信息,并将所述环境信息和所述运行信息发送到后台监控中心。
11.结合第一方面,本发明实施例提供了第一方面的第四种可能的实施方式,其中,所述主控模块还用于控制机器人进行自主巡逻、定点值守和远程控制功能。
12.结合第一方面,本发明实施例提供了第一方面的第五种可能的实施方式,其中,还包括设置在所述机器人主体内部的导航避障模块,用于根据对所述机房中障碍物的位置检测,自主规划出机器人的移动线路。
13.结合第一方面,本发明实施例提供了第一方面的第六种可能的实施方式,其中,还
包括与所述机器人主体相连接的动力机械底盘,用于在所述主控模块的控制下按照所述移动线路进行移动。
14.结合第一方面,本发明实施例提供了第一方面的第七种可能的实施方式,其中,还包括设置在所述机器人主体内部的计算模块,用于对待维护设备的故障情况进行分析。
15.结合第一方面,本发明实施例提供了第一方面的第八种可能的实施方式,其中,所述人机协作模块还包括显示切换装置,通过连接键盘、视频或鼠标端口,访问和控制计算机。
16.第二方面,本发明实施例还提供一种机房协作运维机器人系统,包括如上所述的机房协作运维机器人,还包括云平台,所述云平台与所述机房协作运维机器人通讯连接。
17.云平台提供基于机房现场设备的即时分析数据以及设备知识库数据,通过把设备日常故障信息、各类检测监测数据转换成大数据云端知识库,建立可靠、高效的大数据处理模型、算法及分析处理体系,结合现有设备状态、历史数据等进行数据挖掘分析,通过协作运维机器人为现场的检修人员提供强大的知识库支持,提供检修解决方案,协助现场检修人员完成检修工作。
18.云端知识库的获取是检修人员与协作运维机器人通过语音互动、视频、体感、触摸屏、鼠标键盘等进行。
19.本发明实施例带来了一种机房协作运维机器人和系统,通过对待取出物体的类别进行识别,以便用户取出目标物体时,提示装置能够及时对该目标物体的应用功能、应用设备以及应用设备在机房中是所在位置进行提示,以便用户能够实现快速运维操作,即使在运维过程中遇到问题,也能根据提示装置快速获知解决方案。
20.本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书以及附图中所特别指出的结构来实现和获得。
21.为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
22.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
23.图1为本发明实施例提供的一种机房协作运维机器人中功能结构示意图;
24.图2为本发明实施例提供的一种机房协作运维机器人的结构框图;
25.图3为本发明实施例提供的一种机房协作运维机器人的结构爆炸图;
26.图4为本发明实施例提供的一种机房协作运维机器人的外观结构示意图;
27.图5为本发明实施例提供的另一种机房协作运维机器人的结构示意图。
具体实施方式
28.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明
的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.目前巡检机器人在idc机房得到一定的推广和应用,但大部分是应用于机房的日常巡检工作,机房日常运维中有部分其他功能,比如接待、辅助运维、应急等,机器人在协作配合运维人员作业,减轻工作人员劳动频度、强度,降低运维成本方面,具有巨大的可挖掘性。
30.现有的机房巡检机器人系统是一套通过自主行走机器人结合实时视频采集、声音采集、安全巡检、异常情况检测,做到机房设备实时动态检测。起到的作用,仅仅是一个移动式远程监控工具。
31.但是机房的业务是复杂的、多方面的,比如对于进入机房检修人员的管理、协作问题,还有一些低频的业务应用,如应急管理问题、标杆机房的接待问题等等,这些业务需求,现有的巡检机器人无法胜任。
32.而且机器人巡检应用当中,由于现有机器人功能单一,着重于巡检应用,但因为机房环境影响、机房设备的复杂度,目前应用于机器人算法受各种因素的局限,在实际替代人巡检方面还有很长的路要走,所以导致机房巡检机器人无法全面铺开应用。
33.基于此,本发明实施例提供的一种机房协作运维机器人,可以缓解了现有技术中存在的维修工具管理以及解决方案无法及时获取的技术问题。
34.下面通过实施例进行详细描述。
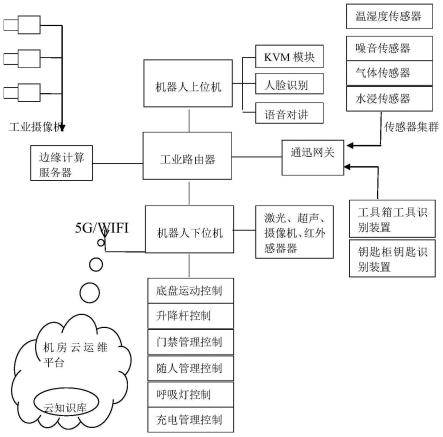
35.图1为本发明实施例提供的一种机房协作运维机器人示意图。
36.该机房协作运维机器人,包括机器人主体、设置所述机器人主体内部的主控模块和人机协作模块;主控模块包括边缘计算服务器、机器人上位机和机器人下位机;边缘计算服务器、机器人上位机和机器人下位机通过工业路由器进行连接,所述人机协作模块包括识别装置和提示装置;
37.所述机器人上位机,可理解为一款带触屏的具备较好性能的工业控制计算机,是机器人的业务应用层软件汇集点,接入kvm模块、人脸识别模块、语音对讲模块,kvm模块,其中kvm模块是一个kvm多计算机切换器,通过它可实现用一套键盘、鼠标、显示器来控制多台计算机,为在机器人上操作控制机房内其他无显示器的服务器提供了方便。
38.人脸识别模块是在上位机接入的一款高清摄像机,人脸识别模组自研或采用成熟厂家的人脸识别组件,本发明实施例采用是虹软人脸识别模组,对于超过十万个人脸可以进行有效识别,准确率达99.5%。通过人脸识别可以辨别进入机房的相关人员是否具有合法性,非法人员无法进入机器人操作平台,并且传输到机房云运维平台报警。
39.语音对讲模块是接入专业麦克风阵列,采用成熟的8麦克风阵列模块,具备主动降噪功能,安装在机器人顶部。麦克风阵列模块通过usb接口连接上位机,上位机获取语音数据后调取云运维平台中的nlp服务进行语义识别,进行自然语言人机交互对话。智能语音控制软件可以自研,也可以采用成熟产品,本发明实施例采用科大讯飞语音软件模块。
40.所述工业路由器位于机器人系统的中心,是数据接入、传输、交互的枢纽。
41.所述边缘计算服务器是集成ai芯片的微小型工控机,本发明实施例采用英伟达jetson tx2方案,自研的机房设备状态灯算法群运行于其中,外部多路工业摄像机通过usb
口接入边缘计算服务,算法检测到工业摄像机原始视频流,将进行自主编码分析,并将分析结果告知机房云运维平台。
42.所述通讯网关包括串口、usb、lora网关、rfid接入器等,根据外部接入不同传感器及不同设备,采用、适配不同的通讯网关,网关采集的数据汇入工业路由器。
43.所述传感器集群是指机器人所集成的各类传感器总集,包括并不限制温湿度传感器、噪声传感器、气体传感器、水浸传感器等,其中温湿度传感器、气体传感器、噪音传感器属于机器人内部传感器,用串口接入通讯网关,安装在机器人外壳面板上,检测当前环境温湿度、环境气体量标值、环境噪声等数值。水浸传感器是外部传感器,在机器人外部,一般安装在的机房内管道边缘,传感器通讯端通过lora或wifi或5g网络,将采集的水浸数据传输到机器人通讯网关。
44.所述工具箱工具识别装置、钥匙柜钥匙识别装置,是安装在机器人侧面的工具箱及钥匙柜中,采用超高频rfid技术,硬件结构上具体采用舵机+射频读卡器方案,在工具及钥匙上贴上rfid标签,实现对工具、钥匙的快速盘点,自动识别进出。
45.所述机器人下位机是一款性能较优的工业控制计算机,机器人控制系统均布置在这里,下位机特点是保障机器人各种运动响应的实时性。包括底盘运动控制、升降杆控制、门禁管理控制、随人管理控制、呼吸灯控制、充电管理控制等等。其中,底盘运动控制采用agv技术,融合了激光、超声、摄像头、红外等传感器,对运动、避障、防跌落等机器人运动功能进行管理控制;升降杆控制是根据业务需要,运维平台控制下位机对升降杆进行上升,下降操作,并进行升降位置指定限制;门禁管理是机器人在机房内运动时,对机房内外部模块门禁,进行指定位置开关操作,保证机器人顺利进出大门,门禁管理安装在下位机上,运动响应比较快速;随人管理控制是机器人跟随人的管理控制,随人模块安装在下位机上,随人发生器带在相关人员身上,随人模块检测到相关人员的发生器发出的信号,就调整位置,紧随相关人员方向做运动,达到在机房人机协作互动的效果;呼吸灯控制管理是对机器人状态指示灯进行控制,设置状态逻辑是,待机状态为绿灯、工作状态为蓝灯、故障时为红灯;充电管理是对电池进行管理控制,采集蓄电池的状态数据,并在受命或电池容量低于阈值时,主动控制机器人去充电桩充电。
46.所述机房云运维平台是机器人运维的后台,所有数据在这里汇集、处理、分析,云平台系统分析了机房设备的故障征兆,进行本体建模,建立了相关故障诊断系统模型,构造了扩展指数查询混合代理结构。主要针对数据采集、诊断、事例分析及管理等核心模块,分析设计了故障诊断协商交互序列。最后,根据铁路设备故障处理的实际状况,开发了系统模型,实现了运维故障诊断决策管理系统,实现了历史诊断数据的管理,并且为运维维修人员提供了良好的决策支持。
47.云平台还提供基于机房现场设备的即时分析数据以及设备知识库数据,通过把设备日常故障信息、各类检测监测数据转换成大数据云端知识库,建立可靠、高效的大数据处理模型、算法及分析处理体系,结合现有设备状态、历史数据等进行数据挖掘分析,通过协作运维机器人为现场的检修人员提供强大的知识库支持,提供检修解决方案,协助现场检修人员完成检修工作。
48.云端知识库的获取是检修人员与协作运维机器人通过语音互动、视频、体感、触摸屏、鼠标键盘等进行。
49.本发明的创新点还在于,克服了当前巡检服务机器人仅仅是综合巡检场景,发现问题,呈现上报问题的简单模式。提出了新的raat(robot as a tool机器人即工具)、raas(robot as a service机器人即服务)模式,不但融合了基础的巡检功能,更侧着重于人机友好协作,实现包括人机协作的导引、语音交互、工具箱、钥匙柜、知识库等人机协作,实现从一个巡检机器人到智能运维机器人功能转变,成为人们的得力工具、有益的助手,减轻人们工作强度,利用其云上运维大数据知识库,使得运维维修质量和效率得到显著的提高。
50.其中,机器人主体的外设部分具体可如图4所示,机器人的结构爆炸图可如图3所示。需要说明的是,本发明实施例的重点并不在于其具体的结构组装,图3和图4也仅为一种示范例,并不局限于此。
51.所述识别装置,用于识别待取出物体的类别信息,并将所述类别信息发送至所述主控模块;
52.所述主控模块,用于根据所述类别信息,向所述提示装置发出相应的控制信号;
53.所述提示装置,用于根据所述控制信号,提示所述待取出物体的类别、所述待取出物体对应的应用设备以及所述应用设备在机房的设置位置。
54.在实际应用的优选实施例中,通过对待取出物体的类别进行识别,以便用户取出目标物体时,提示装置能够及时对该目标物体的应用功能、应用设备以及应用设备在机房中是所在位置进行提示,以便用户能够实现快速运维操作,即使在运维过程中遇到问题,也能根据提示装置快速获知解决方案。
55.在一些实施例中,所述人机协作模块还包括工具箱和钥匙柜,所述识别装置还用于识别出来自于所述工具箱或所述钥匙柜的待取出物体的类别信息。
56.其中,所述识别装置设置于所述工具箱的箱门或所述钥匙柜的柜门上。作为一种可选的实施例,待取出物体上设置有射频标签,当待取出物体从工具箱或钥匙柜中取出,箱门或柜门中的识别装置(如读卡器)能够对射频标签中的待取出物体的类别信息进行识别,进而进行语音播放或其他控制操作。
57.在一些实施例中,如图2所示,还包括设置在所述机器人主体内部的监控模块,用于在巡逻过程中,实时采集环境信息和待维护设备的运行信息,并将所述环境信息和所述运行信息发送到后台监控中心。
58.其中,该监控模块可包括双仓云台、可见光摄像机和工业相机等等。
59.在实际应用过程中,机器人可配备一个双仓云台,云台搭载一个5-160mm32倍光学变倍,16倍数字变倍1080p的可见光高清摄像头及原始分辨率640
×
512红外热成像摄像机,通过对视频智能分析模块可实现在白天进行人员身份检测、夜间人体检测及全天候的异常热源检测。
60.其中,可见光摄像机参数:5-160mm32倍光学变倍,16倍数字变倍,支持自动光圈、自动聚焦、自动白平衡、背光补偿、宽动态、3d数字降噪、日夜转换、支持强光抑制。
61.在应用过程中,缩支架上可架设3组500万像素的cmos usb3.0工业面阵相机,通过usb3.0接口实时传输非压缩数据,最高帧率可达71.8fps,运用工业级摄像机实现对机柜内设备的高分辨率图像抓拍,为能够实现对机柜内设备的信号灯进行智能识别打下基础。
62.在一些实施例中,所述主控模块还用于控制机器人进行自主巡逻、定点值守和远程控制功能。
63.其中,主控模块是机器人的核心业务模块,机器人主要任务需要通过主控模块进行执行,包括自主巡逻、定点值守、智能识别和远程控制功能。
64.在一些实施例中,还包括通讯模块,该通讯模块包括内部通讯和外部通讯模块,其中内部通讯模块的设置用于防止外部网络异常,确保机器人运行过程中的所有数据上传后台。
65.示例性地,机器人与后台进行数据传输的时候可以通过机器人的内部私有无线模块实现与外部无线基站的实时通讯,完成对巡检过程中的对巡检过程中的视频、音频以及告警等信息的传输,同时后台终端发出的控制指令也可以通过该无线模块进行传输给机器人。
66.在实际应用过程中,若机器人因为网络问题,在不能实时与后台互联通讯时,机器人本体会保持机器人运行过程中的所有的音视频信息、环境数据信息,在网络通畅时上传后台。
67.在一些实施例中,还包括设置在所述机器人主体内部的导航避障模块,用于根据对所述机房中障碍物的位置检测,自主规划出机器人的移动线路。若遇到障碍物,可通过拾音器、扩音器、对讲控制系统组合等远程对讲的应用,实现避障提示。
68.其中,导航避障模块采用自主研发的激光导航算法,已实现众多场景的应用验证,包括部队、博物馆、工厂、看守所等复杂的、大面积的场所应用,在室内环境下能够实现2cm的精准定位,复杂环境中的多线路自主规划,在室外环境中,导航误差不大于8cm,且能够满足30%的地图容错率,算法的精度和容错率达到业内领先水平。
69.激光导航设备参数如表1所示:
70.表1
71.激光扫描仪25米西克tim571激光定位精度
±
4cm地图大小最大10万平米空间
72.在一些实施例中,还包括与所述机器人主体相连接的动力机械底盘,用于在所述主控模块的控制下按照所述移动线路进行移动。
73.机器人采用纯电力驱动方式,采用24v,25ah可选锂电池,最高充电功率达800w,电量不足时能自主返回充电站充电。
74.在一些实施例中,还包括接入控制模块,该模块配置的工业服务器,可以接入控制外部摄像机、云台、升降杆、呼吸灯等外部设备。
75.在一些实施例中,还包括环境感知模块,机器人可配置温湿度、so2等气体传感器、水浸传感器等,实现了温湿度监测、供蓄电池泄漏监测、漏水检测等功能。
76.在一些实施例中,还包括设置在所述机器人主体内部的计算模块,用于对待维护设备的故障情况进行分析。
77.在一些实施例中,所述人机协作模块还包括显示切换装置(keyboard video mouse,kvm),通过连接键盘、视频或鼠标端口,访问和控制计算机。
78.需要说明的是,在实际应用过程中,除上述模块的设置,机房协作运维机器人还可能包括其他模块,机器人的模块设置可如下表2所示:
79.表2
[0080][0081]
[0082][0083]
在一些实施例中,还提供一种如图5所示的机房协作运维机器人,机器人的底盘上设置有供电口、rj45接口、usb接口和dc接口;供电口通过24v电压与电源板相连接,电源板分别为触摸屏、交换机、云台、nvidia-nx、路由器供电;其中,触摸屏可通过hdmi和usb与kvm切换器相连接,kvm切换器再分别与键鼠套装、切换按钮和hdmi接口相连接;kvm切换器还与工控机相连接,工控机还连接麦克风、人脸识别、rfid识别、音响和usb拓展坞;usb拓展坞连接气体传感器、噪声传感器和升降驱动器,该升降驱动器与升降步进电机和接近传感器相连接;
[0084]
rj45接口通过rj45协议与路由器相连接,以使路由器通过交换机与nvidia-nx相连接;该交换机还与云台和工控机相连接;nvidia-nx还通过三个usb3.0接口与三个工业相机相连接;该、usb接口用于连接3d摄像头和跟随基站;该dc接口用于连接急停按钮。
[0085]
本发明实施例以人机协作智能巡检机器人为核心,整合人工智能、云计算、大数据、多传感器融合技术、激光导航定位技术以及物联网技术等。以人机协作为核心,集成环境感知、动态决策、行为控制和报警装置,图像感知。具备自主感知、自主行走、自主保护、自主识别等能力,能够实现全天候、全方位、全自主智能巡检和监控。通过运维、快速的接入方式兼容不同工业协议、不同数据格式的设备,提供低延时、低成本、高可用性、易扩展的本地计算服务。同时它与云端大数据、智能学习模型等相结合,提供最佳的数据应用模式,打造云边端(云平台、边缘计算、设备端)三位一体的智能工业互联网体系。
[0086]
在一些实施例中,本发明实施例还提供一种机房协作运维机器人系统,包括如上所述的机房协作运维机器人,还包括云平台,所述云平台与所述机房协作运维机器人通讯连接。
[0087]
本发明实施例基于人机协作的机房辅助运维机器人,着重于机房现场处理问题,不但具备一般的实时视音频采集、安全巡检、异常监测等功能,还具备了入侵检测、随工监察、远程知识库、远程协助、接待引导、应急管理等工作业务模式功能,在结构上,内部配置了工具箱、钥匙柜、kvm显示切换等装置,解决了机房现场人机协作应用的切实的问题。
[0088]
本发明实施例提供的机房协作运维机器人系统,与上述实施例提供的机房协作运
维机器人具有相同的技术特征,所以也能解决相同的技术问题,达到相同的技术效果。
[0089]
在本发明实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0090]
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0091]
在本技术所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,又例如,多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些通信接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
[0092]
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0093]
另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
[0094]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1