一种煤矿井下运输安全预控方法及系统与流程
1.本发明属于煤矿安全技术领域,具体涉及一种煤矿井下运输安全预控方法及系统。
背景技术:
2.煤矿是人类在富含煤炭的矿区开采煤炭资源的区域,一般分为井工煤矿和露天煤矿。当煤层离地表远时,一般选择向地下开掘巷道采掘煤炭,此为井工煤矿。当煤层距地表的距离很近时,一般选择直接剥离地表土层挖掘煤炭,此为露天煤矿。我国绝大部分煤矿属于井工煤矿,煤矿范围包括地上地下以及相关设施的很大区域。煤矿是人类在开掘富含有煤炭的地质层时所挖掘的合理空间,通常包括巷道、井硐和采掘面等等。在煤矿采掘的过程中,需要大量的人员和车辆参与到煤矿井下的作业中,井下的运输车辆会对运输线路上的作业人员带来一定的安全威胁。
3.为了防止发生井下运输车辆撞伤作业人员,目前矿井主要采取的是制定相关的安全规定,通过制度约束驾车人员和巷道作业人员的行为来达到安全运输的目的。但是由于在导致安全事故发生的4个条件中,人的不安全行为是非常重要的一方面,占事故发生起因的主要方面。由于人的主观意识、思想、心理以及性格等方面的影响,作业人员产生不安全行为的原因是多方面的,所以仅仅通过安全管理规定的约束不能完全杜绝运输事故的发生。目前,矿井配备了人员和车辆的定位技术装备,但是并没有应用于防止运输事故方面的系统装备及相关运输安全事故的预防控制方法。
技术实现要素:
4.本发明要解决的技术问题是:提供一种煤矿井下运输安全预控方法及系统,能够对井下作业的人员、车辆进行精确定位、身份识别和智能管控,有效预防煤矿井下运输事故的发生。
5.本发明为解决上述技术问题所采取的技术方案为:
6.一种煤矿井下运输安全预控方法,包括如下步骤:
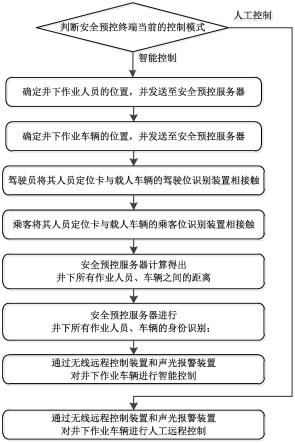
7.s1,判断安全预控终端当前的控制模式,若为“智能控制”模式;则执行步骤s2,若为“人工控制”模式,则执行步骤s9。
8.s2,通过人员定位卡和定位分站确定井下作业人员的位置,并通过交换机将人员位置信息发送至安全预控服务器;
9.s3,通过车辆定位卡和定位分站确定井下作业车辆的位置,并通过交换机将车辆位置信息发送至安全预控服务器;
10.s4,载人车辆的驾驶员将其人员定位卡与所在车辆的驾驶位识别装置相接触,所述驾驶位识别装置将驾驶位配对信息通过交换机发送至安全预控服务器;
11.s5,载人车辆的乘客将其人员定位卡与所在车辆的乘客位识别装置相接触,所述乘客位识别装置将乘客位配对信息通过交换机发送至安全预控服务器;
12.s6,安全预控服务器根据所述人员位置信息和所述车辆位置信息,计算得出井下所有作业人员、车辆之间的距离;
13.s7,安全预控服务器根据所述驾驶位配对信息和所述乘客位配对信息进行井下所有作业人员、车辆的身份识别;
14.其中,人员身份包括:司机、乘客和行人;车辆身份包括:载人车辆和运料车辆;
15.s8,安全预控服务器对井下所有作业人员、车辆之间的距离以及人员身份、车辆身份进行智能分析,并通过车辆上安装的无线远程控制装置和声光报警装置进行井下作业车辆智能控制;
16.s9,安全预控服务器接收安全预控终端发送的车辆远程控制指令,并通过车辆上安装的无线远程控制装置和声光报警装置进行井下作业车辆人工远程控制。
17.进一步的,所述人员定位卡由煤矿井下所有作业人员携带,所述车辆定位卡安装于井下所有运输车辆上;所述定位分站设有多个,多个定位分站根据预设的位置安装于煤矿井下的辅助运输巷道中,所述定位分站具备无线信号传输功能。
18.进一步的,人员/车辆位置信息的确定过程包括:根据人员/车辆定位卡信号的传输速度和信号强弱判断人员/车辆定位卡与多个定位分站的距离,结合多个定位分站的预设位置,确定人员/车辆定位卡在煤矿井下的实际位置。
19.进一步的,所述驾驶位识别装置和乘客位识别装置均为rfid射频识别装置,所述驾驶位识别装置安装于载人车辆和运料车辆的驾驶位,所述乘客位识别装置安装于载人车辆的乘客位。
20.进一步的,在步骤s7中,所述身份识别的具体过程为:
21.当人员位置与处于静止状态(行驶速度为0)的车辆位置重合,且接收到驾驶位配对信息时,则将对应的人员确定为“司机”;
22.当人员位置与处于静止状态(行驶速度为0)的车辆位置重合,且接收到乘客位配对信息时,则将对应的人员确定为“乘客”,并将对应的车辆确定为“载人车辆”;
23.当人员位置与处于静止状态(行驶速度为0)的车辆位置重合,且只接收到驾驶位配对信息而未接收到乘客位配对信息时,则将对应的车辆确定为“运料车辆”;
24.当人员位置未与车辆位置重合时,则将对应的人员确定为“行人”。
25.进一步的,在步骤s8中,所述井下作业车辆智能控制的具体步骤为:
26.s81,判断“行人”与处于运动状态(行驶速度大于0)的“载人车辆”/“运料车辆”的距离是否小于预设报警距离l1,若是,则执行步骤s82,若否,则不进行智能控制;
27.s82,判断“行人”与处于运动状态(行驶速度大于0)的“载人车辆”/“运料车辆”的距离是否小于预设安全距离l2,若否,则声光报警装置发出声光报警信号,若是,则执行步骤s83;
28.s83,判断“行人”与处于运动状态(行驶速度大于0)的“载人车辆”/“运料车辆”的距离是否小于最小安全距离l3,若否,则无线远程控制装置控制对应的“载人车辆”/“运料车辆”发出声光报警信号的同时减速运行,若是,则无线远程控制装置控制对应的“载人车辆”/“运料车辆”紧急停车;
29.其中,l1>l2>l3。
30.进一步的,所述无线远程控制装置安装于井下作业的车辆上,用于接收安全预控
服务器发送的指令对车辆的车速和启停进行控制;
31.所述声光报警装置安装于井下作业的车辆上,用于接收安全预控服务器发送的指令发出声光报警信号。
32.本发明与现有技术相比具有以下主要的优点:
33.1、通过定位卡信号的传输速度和信号强弱判断定位卡与多个定位分站的距离,结合多个定位分站的预设位置,能够准确定位人员、车辆在煤矿井下的实际位置,同时,根据定位卡与车辆上识别装置的配对信息,能够快速识别井下作业人员、车辆的身份;
34.2、提出了井下作业车辆的智能控制方法,对井下所有作业人员、车辆之间的距离以及人员身份、车辆身份进行智能分析,并通过车辆上安装的无线远程控制装置控制车辆减速和急停,并通过声光报警装置发出警报提醒司机和行人,能够有效预防煤矿井下运输事故的发生;
35.3、预控系统具有“智能控制”和“人工控制”两种控制模式,且可以快速切换,进一步拓展了本系统的应用情景,能够更方便的对井下作业人员、车辆进行管控。
附图说明
36.图1为本发明预控方法的整体流程图;
37.图2为本发明车辆智能控制的流程图;
38.图3为本发明预控系统的系统示意图。
具体实施方式
39.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
40.需要指出,根据实施的需要,可将本技术中描述的各个步骤/部件拆分为更多步骤/部件,也可将两个或多个步骤/部件或者步骤/部件的部分操作组合成新的步骤/部件,以实现本发明的目的。
41.一、一种煤矿井下运输安全预控方法
42.如图1所示,本技术实施例提供了一种煤矿井下运输安全预控方法,具体包括如下步骤:
43.s1,判断安全预控终端当前的控制模式,若为“智能控制”模式,则执行步骤s2,若为“人工控制”模式,则执行步骤s9;
44.s2,通过人员定位卡和定位分站(基站)确定井下作业人员的位置,并通过交换机将人员位置信息发送至安全预控服务器;
45.s3,通过车辆定位卡和定位分站(基站)确定井下作业车辆的位置,并通过交换机将车辆位置信息发送至安全预控服务器;
46.(具体的,所述人员定位卡由煤矿井下所有作业人员携带,所述车辆定位卡安装于井下所有运输车辆上;所述定位分站设有多个,多个定位分站根据预设的位置安装于煤矿井下的辅助运输巷道中,根据人员/车辆定位卡信号的传输速度和信号强弱判断人员/车辆
定位卡与多个定位分站的距离,结合多个定位分站的预设位置,确定人员/车辆定位卡在煤矿井下的实际位置)。
47.s4,载人车辆的驾驶员将其人员定位卡与所在车辆的驾驶位识别装置相接触,所述驾驶位识别装置将驾驶位配对信息通过交换机发送至安全预控服务器;
48.s5,载人车辆的乘客将其人员定位卡与所在车辆的乘客位识别装置相接触,所述乘客位识别装置将乘客位配对信息通过交换机发送至安全预控服务器;
49.(所述驾驶位识别装置安装于载人车辆和运料车辆的驾驶位,所述乘客位识别装置安装于载人车辆的乘客位)。
50.s6,安全预控服务器根据所述人员位置信息和所述车辆位置信息,计算得出井下所有作业人员、车辆之间的距离;
51.s7,安全预控服务器根据所述驾驶位配对信息和所述乘客位配对信息进行井下所有作业人员、车辆的身份识别;
52.(其中,人员身份包括:司机、乘客和行人;车辆身份包括:载人车辆和运料车辆;所述身份识别的具体过程为:
53.当人员位置与处于静止状态(行驶速度为0)的车辆位置重合,且接收到驾驶位配对信息时,则将对应的人员确定为“司机”;
54.当人员位置与处于静止状态(行驶速度为0)的车辆位置重合,且接收到乘客位配对信息时,则将对应的人员确定为“乘客”,并将对应的车辆确定为“载人车辆”;
55.当人员位置与处于静止状态(行驶速度为0)的车辆位置重合,且只接收到驾驶位配对信息而未接收到乘客位配对信息时,则将对应的车辆确定为“运料车辆”;
56.当人员位置未与车辆位置重合时,则将对应的人员确定为“行人”)。
57.s8,安全预控服务器对井下所有作业人员、车辆之间的距离以及人员身份、车辆身份进行智能分析,并通过车辆上安装的无线远程控制装置和声光报警装置进行井下作业车辆智能控制;
58.s9,安全预控服务器接收安全预控终端发送的车辆远程控制指令,并通过车辆上安装的无线远程控制装置和声光报警装置进行井下作业车辆人工远程控制。
59.如图2所示,在步骤s8中,所述井下作业车辆智能控制的具体步骤为:
60.s81,判断“行人”与处于运动状态(行驶速度大于0)的“载人车辆”/“运料车辆”的距离是否小于预设报警距离l1,若是,则执行步骤s82,若否,则不进行智能控制;
61.s82,判断“行人”与处于运动状态(行驶速度大于0)的“载人车辆”/“运料车辆”的距离是否小于预设安全距离l2,若否,则声光报警装置发出声光报警信号,若是,则执行步骤s83;
62.s83,判断“行人”与处于运动状态(行驶速度大于0)的“载人车辆”/“运料车辆”的距离是否小于最小安全距离l3,若否,则无线远程控制装置控制对应的“载人车辆”/“运料车辆”发出声光报警信号的同时减速运行,若是,则无线远程控制装置控制对应的“载人车辆”/“运料车辆”紧急停车;
63.其中,l1>l2>l3。
64.更进一步的,所述无线远程控制装置安装于井下作业的车辆上,用于接收安全预控服务器发送的指令对车辆的车速和启停进行控制;
65.所述声光报警装置安装于井下作业的车辆上,用于接收安全预控服务器发送的指令发出声光报警信号。
66.二、一种煤矿井下运输安全预控系统
67.基于同一发明构思,本技术实施例还提供了一种煤矿井下运输安全预控系统,用于实现如上所述的预控方法,如图3所示,包括:
68.1)安全预控终端
69.安装在监控中心大厅,生产管理人员通过安全预控终端(具体为监控中心的监控大屏及远程控制平台)访问安全预控服务器实现对井下作业的人员、车辆的位置监控和远程管控,监控终端具有地图显示,车辆远程控制,人员位置及资料显示查询,车辆位置及资料显示查询,人员、车辆的历史位置追踪查询等功能;
70.所述安全预控终端有“智能控制”和“人工控制”两种控制模式,可通过对应的虚拟按键进行选择,并将所选的控制模式信息发送给安全预控服务器。
71.2)安全预控服务器
72.安装在监控中心机房,主要功能如下:
73.a.接收定位分站和定位卡发送的数据,确定井下人员、车辆的位置,并计算人员与车辆的距离;
74.b.结合定位卡与识别装置的配对信息进行井下作业人员、车辆的身份识别;
75.c.根据井下作业人员、车辆的身份和位置,发送相应指令给车辆的无线远程控制装置和声光报警装置;
76.d.提供数据给安全预控终端,并将安全预控终端发送的车辆控制指令转发给车辆的无线远程控制装置和声光报警装置;
77.e.接收速度传感器发送的车速信息,确定井下作业车辆的运动状态。
78.3)交换机
79.安装在监控中心机房,作为通信网络的交换设备,负责所有接入通信网络的设备的数据交换,具体为以太网络交换机设备,通过通信线缆与井下定位分站电连接。
80.4)定位分站(基站)
81.(设有x个,定位分站的数量根据煤矿井下人员、车辆活动区域的范围确定)
82.多个定位分站(基站)根据预设的位置安装在煤矿井下辅助运输巷道中,负责对定位卡及其它无线通信设备提供无线通信网络接入服务,并作为定位卡的参考定位节点为其提供定位服务,通过通信线缆连接交换机。
83.所述定位服务具体为:根据定位卡信号的传输速度和信号强弱判断定位卡与多个定位分站的距离,结合多个定位分站的预设位置,确定定位卡在煤矿井下的实际位置。
84.5)定位卡(设有n个,n为井下作业人员、车辆的总数量)
85.用于监测井下作业人员、车辆的位置,通过定位分站实现定位和无线通信,将自身位置数据发送给安全预控服务器;
86.包括人员定位卡和车辆定位卡,所述人员定位卡由煤矿井下所有作业人员携带,所述车辆定位卡安装于井下所有运输车辆上。
87.6)识别装置(设有m个,m为井下作业车辆驾驶位和乘客位的总数量)
88.具体采用rfid射频识别装置,用于配合定位卡进行井下作业人员、车辆的身份识
别,并将自身与定位卡的配对信息发送给安全预控服务器;
89.包括驾驶位识别装置和乘客位识别装置,所述驾驶位识别装置安装于载人车辆(人车)和运料车辆的驾驶位,所述乘客位识别装置安装于载人车辆(人车)的乘客位。
90.所述身份识别的具体过程如下:
91.司机驾驶载人车辆启动前通过将自己身上佩戴的人员定位卡与驾驶位识别装置进行配对接触,则人员确定为“司机”;
92.需要乘坐载人车辆的作业人员在乘车时将自己身上佩戴的人员定位卡与乘客位识别装置进行配对接触,则人员确定为“乘客”,且车辆确定为“载人车辆(人车)”;
93.其他只有“司机”配对信息没有“乘客”配对信息的车辆,确定为“运料车辆(料车)”;
94.其他未上车的井下作业人员未与识别装置进行配对,确定为“行人”。
95.7)无线远程控制装置
96.安装于井下作业的车辆上,用于接收安全预控服务器发送的指令对车辆的车速和启停进行控制。
97.8)声光报警装置
98.安装于井下作业的车辆上,用于接收安全预控服务器发送的指令发出声光报警信号,对井下作业人员进行提醒。
99.9)速度传感器(设有y个,y为载人车辆和运料车辆的总数量)
100.安装于井下作业的车辆(载人车辆和运料车辆)上,用于监测车辆的行驶速度,并将车速信息发送给安全预控服务器,通过安全预控服务器判断车辆是否处于运动状态。
101.综上所述,采用本发明的一种煤矿井下运输安全预控方法及系统:
102.1、通过定位卡信号的传输速度和信号强弱判断定位卡与多个定位分站的距离,结合多个定位分站的预设位置,能够准确定位人员、车辆在煤矿井下的实际位置,同时,根据定位卡与车辆上识别装置的配对信息,能够快速识别井下作业人员、车辆的身份;
103.2、提出了井下作业车辆的智能控制方法,对井下所有作业人员、车辆之间的距离以及人员身份、车辆身份进行智能分析,并通过车辆上安装的无线远程控制装置控制车辆减速和急停,并通过声光报警装置发出警报提醒司机和行人,能够有效预防煤矿井下运输事故的发生;
104.3、预控系统具有“智能控制”和“人工控制”两种控制模式,且可以快速切换,进一步拓展了本系统的应用情景,能够更方便的对井下作业人员、车辆进行管控。
105.以上实施例仅用于说明本发明的设计思想和特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,本发明的保护范围不限于上述实施例。所以,凡依据本发明所揭示的原理、设计思路所作的等同变化或修饰,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1