机器人的三闭环鲁棒预测函数控制方法
1.本发明涉及一种控制方法,特别是一种机器人的三闭环鲁棒预测函数控制方法。
背景技术:
2.机器人逆运动学控制是一种经典的机器人运动及动力控制方法,然而实施精确描述的逆动力学控制方法的一个缺点是,系统参数必须是明确已知的,如果参数具有不确定性,例如当机械臂抓起一个未知负载,那么并不能保证逆动力学控制器能够实现理想性能,因此,需要一种鲁棒性强,能够在参数有不确定性、外部干扰等因素的干扰下保持系统稳定的机器人控制方法。
技术实现要素:
3.本发明的目的是为了解决上述现有技术的不足而提供一种鲁棒性强,执行简单的机器人的三闭环鲁棒预测函数控制方法。
4.为了实现上述目的,本发明所设计的机器人的三闭环鲁棒预测函数控制方法,它包括使用预测函数控制方法、极点配置、鲁棒逆运动学等内环/外环控制架构,并有以下步骤:
5.i.建立机器人模型,并简化为欧拉-拉格朗日运动方程的形式:
6.ii.向预测控制模型输入k+i时刻的参考轨迹c(k+i);
7.iii.选择预测控制模型的目标函数;
8.iv.预测控制模型计算出外环控制计算参数δa,并将之输入外环控制器;预测控制模型采用的目标函数及计算方式均为现有技术。
9.v.外环控制量为将外环控制量输入内环控制器;式中是指给定的关节角加速度。
10.vi.依据步骤i中的机器人模型,推导出内环控制器输出量其中等以的形式表示的参数为m、c、g的计算值或表征值,即因为系统中的不确定性,导致存在误差,因此表示的值只是计算值。
11.vii.利用内环控制器输出量u控制机器人运动,测量机器人输出的运动变量q、
12.viii.计算实际跟踪误差将实际跟踪误差e返回外环控制器,从而实现对外环控制量计算公式的调整;式中
η为系统的不确定性,η为系统的不确定性,
13.ix.建立跟踪误差的标准模型em(k+i)=β
kem
(k)+(1-βk)
·
c(k+i);式中β为参考轨迹收敛速度系数,0≤β≤1;
14.x.将步骤iv中计算出的外环控制计算参数δa输入跟踪误差的标准模型,计算得到标准跟踪误差em;
15.xi.将e及em作为误差预测反馈返回预测控制模型,优化预测控制模型的目标函数;
16.xii.转至步骤i,持续执行,直至输出的运动变量q、与输入参考轨迹之间的误差满足预设标准。
17.预测控制模型的目标函数采用二次型目标函数,公式为(i=0,1,
……
,p-1),其中p是预测步数。
18.本发明得到的机器人的三闭环鲁棒预测函数控制方法,将预测函数控制器、极点配置、鲁棒逆运动学运用于机器人的内外环控制架构中,提高了机器人控制系统的抗干扰能力、实用性和可靠性。
附图说明
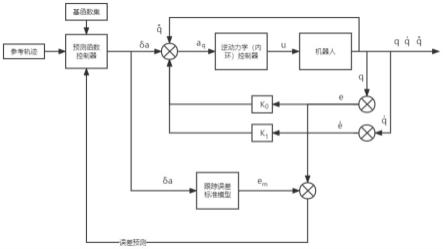
19.图1是本发明机器人的三闭环鲁棒预测函数控制方法的控制框图。
具体实施方式
20.为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效,详细说明如后。
21.实施例1:
22.本实施例描述的机器人的三闭环鲁棒预测函数控制方法,如图1所示,它包括使用预测函数控制方法、极点配置、鲁棒逆运动学等内环/外环控制架构,并有以下步骤:
23.i.建立机器人模型,并简化为欧拉-拉格朗日运动方程的形式:
24.ii.向预测控制模型输入k+i时刻的参考轨迹c(k+i);
25.iii.选择预测控制模型的目标函数;
26.iv.预测控制模型计算出外环控制计算参数δa,并将之输入外环控制器;预测控制模型采用的目标函数及计算方式均为现有技术。
27.v.外环控制量为将外环控制量输入内环控制器;式中是指给定的关节角加速度,为线性反馈项,用于稳定双积分环节,外环控制计算参数δa则能够用于克服下文不确定性η中潜在的不稳定影响。
28.vi.依据步骤i中的机器人模型,推导出内环控制器输出量
其中等以的形式表示的参数为m、c、g的计算值或表征值,即因为系统中的不确定性,导致存在误差,因此表示的值只是计算值或表征值;本实施例中是通过机器人本身参数进行运算得到的理论值。
29.vii.利用内环控制器输出量u控制机器人运动,测量机器人输出的运动变量q、该运动变量分别表示位移、速度及加速度,运用于机械臂时,测量对象为机械臂末端;
30.viii.计算实际跟踪误差将实际跟踪误差e返回外环控制器,从而实现对外环控制量计算公式的调整;式中η为系统的不确定性,η为系统的不确定性,即同理;
31.ix.建立跟踪误差的标准模型
32.同时,根据标准模型得到的em(k)和设定值c(k+i),得到下面em(k+i),em(k+i)=β
kem
(k)+(1-βk)
·
c(k+i);式中β为参考轨迹收敛速度系数,0≤β≤1;
33.x.将步骤iv中计算出的外环控制计算参数δa输入跟踪误差的标准模型,计算得到标准跟踪误差em;
34.xi.将e及em(k+i)作为误差预测反馈返回预测控制模型,优化预测控制模型的目标函数;
35.xii.转至步骤i,持续执行,直至输出的运动变量q、与输入参考轨迹之间的误差满足预设标准。
36.预测控制模型的目标函数采用二次型目标函数,公式为(i=0,1,
……
,p-1),式中的e(k+i)即步骤xi中返回的e。
37.本实施例提供的机器人的三闭环鲁棒预测函数控制方法,将预测函数控制器、极点配置、鲁棒逆运动学运用于机器人的内外环控制架构中,提高了机器人控制系统的抗干扰能力、实用性和可靠性。
38.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明,任何本领域技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
技术特征:
1.一种机器人的三闭环鲁棒预测函数控制方法,它包括使用了预测函数控制方法、极点配置、鲁棒逆运动学的内环/外环控制架构,其特征是有以下步骤:i.建立机器人模型,并简化为欧拉-拉格朗日运动方程的形式;ii.向预测控制模型输入参考轨迹c(k+i);iii.选择预测控制模型的目标函数;iv.预测控制模型计算出外环控制计算参数δa,并将之输入外环控制器;v.外环控制量为将外环控制量输入内环控制器;vi.依据步骤i中的机器人模型,推导出内环控制器输出量u;vii.利用内环控制器输出量u控制机器人运动,测量机器人输出的运动变量q、viii.计算实际跟踪误差将实际跟踪误差e返回外环控制器,从而实现对外环控制量计算公式的调整;ix.建立跟踪误差的标准模型ix.建立跟踪误差的标准模型x.将步骤iv中计算出的外环控制计算参数δa输入跟踪误差的标准模型,计算得到标准跟踪误差e
m
;xi.将e及e
m
作为误差预测反馈返回预测控制模型,优化预测控制模型的目标函数;xii.转至步骤i,持续执行,直至输出的运动变量q、与输入参考轨迹之间的误差满足预设标准。2.根据权利要求1所述的机器人的三闭环鲁棒预测函数控制方法,其特征是预测控制模型的目标函数采用二次型目标函数。
技术总结
本发明公开了一种机器人的三闭环鲁棒预测函数控制方法,它包括以下步骤:i.建立机器人模型;ii.输入参考轨迹;iii.选择目标函数;iv.计算外环控制计算参数,输入外环控制器;v.计算外环控制量并输入内环控制器;vi.推导内环控制器输出量;vii.控制机器人运动,测量运动变量;viii.将实际跟踪误差返回外环控制器,调整外环控制量计算公式;ix.建立跟踪误差的标准模型;x.计算标准跟踪误差;xi.将误差预测反馈返回预测控制模型,优化预测控制模型的目标函数;xii.转至步骤i持续执行,直至误差满足预设标准。本发明将预测函数控制器、极点配置、鲁棒逆运动学运用于三闭环控制架构中,提高了控制系统的抗干扰能力、实用性和可靠性。实用性和可靠性。实用性和可靠性。
技术研发人员:张智焕
受保护的技术使用者:浙大宁波理工学院
技术研发日:2022.08.17
技术公布日:2022/11/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1