一种用于三自由度水面无人艇跟踪控制方法
本发明属于水面无人艇跟踪控制领域,尤其涉及一种用于三自由度水面无人艇跟踪控制方法。
背景技术:
1、随着科学技术的进步以及陆地上自然资源的不断消耗,对海洋的探索和开发已成为社会发展的需求,进而推动水面无人艇(unmanned surface vehicle)的跟踪控制领域迅速发展。水面无人艇具有小体积、高机动、智能化和模块化等优势,应用领域越来越广泛,比如水质监测、水上垃圾清理、水岸堤坝看护、水中资源及水产品观测、海上通信中继,以及其他军事应用等,作为探索海洋领域的一种重要工具,受到了各个领域学者的广泛关注。
2、海洋环境具有严重的不确定性,无人水面艇在水面工作时,难以避免受到洋流、风浪、漩涡等外部时变扰动的影响,并且无人水面艇系统模型常常存在未知动态部分,以及本身结构的复杂性,导致对水面无人艇建立精确的等效模型的难度加大,使得水面无人艇的跟踪控制仍然是一项富有挑战性的任务。未知动态和外部时变扰动的影响使得水面无人艇的跟踪性能大大降低,为了保证水面无人艇的跟踪期望轨迹的能力,所以对其抗干扰性以及处理未知动态的研究是必要的。
3、随着计算机和网络技术的发展,网络化控制系统凭借其拓展性强、灵活度高等优点受到诸多领域的青睐。然而在现有的控制方法中,大多数都是基于周期性采样或时间触发的,传统的时问触发控制方法由于在等间隔的离散时刻点上周期性地传输并更新控制信号,网络传输的数据量也越来越大,将导致大量不必要的冗余信息被传输,进而造成有限网络资源的浪费。对于网络控制系统而言,周期采样除了会产生过高的计算成本之外,还会加重通信负担。如何有效地减少网络中的数据传输量,降低通信通道的占用,进而节省网络带宽资源成为一个具有重要意义的研究课题。
技术实现思路
1、有鉴于此,为解决上述现有技术的不足,本发明的目的在于提供了一种用于三自由度水面无人艇跟踪控制方法,该控制法不仅提高系统的跟踪精度,改善系统的瞬态性能,而且使系统输出在有限时间内被限制在预设的范围内,实现跟踪误差在固定时间内收敛到零的小邻域内;并且显著降低了通讯成本和通信通道的占用,节省网络带宽资源。
2、为实现上述目的,本发明所采用的技术方案是:一种用于三自由度水面无人艇跟踪控制方法,包括以下步骤:
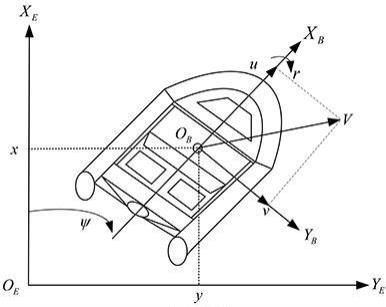
3、s1、根据三自由度水面无人艇的动力学模型,考虑未知动态和外部时变扰动的情况下,构造出水面无人艇的状态方程;
4、s2、根据步骤s1所构造出的状态方程,设计有限时间预设性能函数vi(t),同时定义误差转换函数ti(εi),使受到性能函数约束的信号转换为不受约束的变量,然后经过坐标变化得到二级系统的误差方程;
5、s3、针对s2所得到的不受约束的变量和第一级系统,构建第一个李雅普诺夫函数v1,将v1对时间求导得到其一阶导数,然后基于反步法设计使第一级系统趋于稳定的第一虚拟控制信号α1和第一自适应律
6、s4、采用事件触发通信策略,针对三自由度水面无人艇第二级系统,构建第二个李雅普诺夫函数v2,将v2对时间求导得到其一阶导数,然后基于反步法设计第二虚拟控制信号α2、第二自适应律和复合扰动自适应律将第一个李雅普诺夫函数v1和第二个李雅普诺夫函数v2合并得到使得系统闭环稳定得总李雅普诺夫函数结合引理,该控制器保证闭环系统中所有信号固定时间半全局最终一致有界;
7、s5、采用自触发通信策略,针对三自由度水面无人艇第二级系统,构建第三个李雅普诺夫函数v3,将v3对时间求导得到其一阶导数,然后基于反步法设计第二虚拟控制信号α3、第二自适应律和复合扰动自适应律将第一个李雅普诺夫函数v1和第三个李雅普诺夫函数v3合并得到使得系统闭环稳定得总李雅普诺夫函数结合引理,该控制器保证闭环系统中所有信号固定时间半全局最终一致有界;
8、s6、结合事件/自触发通信机制的触发条件构造出一位编码解码信号传输机制,证明1位编码解码信号传输机制的鲁棒性。
9、进一步的,所述步骤s3的具体过程为:
10、s3.1、结合步骤s1得到的状态方程和步骤s2得到误差方程进行求导,求到第一级系统的误差动态方程;
11、s3.2、针对三自由度水面无人艇的第一级系统,根据第一级系统的误差动态方程构造出第一个李雅普诺夫函数v1,并对其进行求导,得到第一个李雅普诺夫函数的导数式;
12、s3.3、针对在步骤s2所得到的不受约束的变量中所包含的偏导项,使用径向基函数神经网络进行逼近,然后使用杨氏不等式进行放缩处理,解决第一个李雅普诺夫函数的导数式中存在的未知函数;
13、s3.4、基于反步法设计使得第一级系统趋于稳定的第一个虚拟控制信号α1和第一自适应律并将第一个虚拟控制信号α1和第一自适应律带入第一个李雅普诺夫函数的导数式中,得到第一级系统趋于稳定的不等式方程。
14、进一步地,所述步骤s4的具体过程为:
15、s4.1、结合步骤s1得到的状态方程和步骤s2得到的误差方程,对误差方程求导,得到第二级的误差动态方程;
16、s4.2、针对三自由度水面无人艇系统中所包含的未知动态和外部时变扰动的非线性因素,使用径向基函数神经网络进行逼近,将逼近误差和外部时变扰动合并为复合扰动项θ1,然后使用杨氏不等式进行放缩处理,解决第二个李雅普诺夫函数的导数式中包含的未知函数;
17、s4.3、针对三自由度水面无人艇的第二级系统,根据第二级系统的误差动态方程构造出第二个李雅普诺夫函数v2;
18、s4.4、引入事件触发通信机制;
19、s4.5、对第二个李雅普诺夫函数v2求导,得到第二个李雅普诺夫函数的导数式;
20、s4.6、基于反步法设计第二个虚拟控制信号α2、第二个自适应律和复合扰动的自适应律将第二个虚拟控制信号α2、第二个自适应律和复合扰动的自适应律带入第二个李雅普诺夫函数的导数式中;
21、s4.7、将构建的第一个李雅普诺夫函数v1和第二个李雅普诺夫函数v2合并得到使得系统闭环稳定得总李雅普诺夫函数对总李雅普诺夫函数求导使导数式满足则表明三自由度水面无人艇系统的所有闭环信号是固定时间有界。
22、进一步地,步骤s5的具体过程为:
23、s5.1、结合步骤s1得到的状态方程和步骤s2得到的误差方程,对误差方程求导,得到第二级的误差动态方程;
24、s5.2、针对三自由度水面无人艇系统中所包含的未知动态和外部时变扰动的非线性因素,使用径向基函数神经网络进行逼近,将逼近误差和外部时变扰动合并为复合扰动项θ2,然后使用杨氏不等式进行放缩处理,解决第三个李雅普诺夫函数的导数式中包含的未知函数;
25、s5.3、针对三自由度水面无人艇的第二级系统,根据第二级系统的误差动态方程构造出第三个李雅普诺夫函数v3;
26、s5.4、引入自触发通信机制;
27、s5.5、对第三个李雅普诺夫函数v3求导,得到第三个李雅普诺夫函数的导数式;
28、s5.6、基于反步法设计第二个虚拟控制信号α3、第二个自适应律和复合扰动的自适应律将第二个虚拟控制信号α3、第二个自适应律和复合扰动的自适应律带入第三个李雅普诺夫函数的导数式中;
29、s5.7、将构建的第一个李雅普诺夫函数v1和第三个李雅普诺夫函数v3合并得到使得系统闭环稳定得总李雅普诺夫函数对总李雅普诺夫函数求导使导数式满足则表明三自由度水面无人艇系统的所有闭环信号是固定时间有界。
30、进一步地,所述步骤s6的具体过程为:
31、s6.1、根据事件触发机制的触发条件设计1位编码解码信号传输机制;
32、s6.2、根据自触发机制的触发条件设计1位编码解码信号传输机制;
33、s6.3、对所设计的1位编码解码信号传输机制进行鲁棒性分析。
34、进一步地,步骤s3中,设使第一级系统趋于稳定的第一虚拟控制信号α1和第一自适应律为:
35、
36、
37、
38、其中,χ1,σ1i,σ2i为设计参数,i=1,2,3;
39、φ1为第一个径向基神经网络的基函数,为未知参数θ1的估计值,z1为未限制的误差变量,为系统的旋转矩阵,
40、进一步地,步骤s4中,设第二虚拟控制信号α2、第二自适应律和复合扰动自适应律为:
41、
42、
43、
44、
45、其中,bi,χ2i,c1i,c2i,c3i,c4i,g1i,g2i为设计参数,i=1,2,3;δi(t)为时变的设计参数,φ2i为第二个径向基神经网络的基函数,z2i为速度跟踪误差,为未知参数θ2i的估计值,为未知参数θ1i的估计值。
46、进一步地,步骤s5中,设计的第三虚拟控制信号α3、第三自适应律和复合扰动自适应律为:
47、
48、
49、
50、其中,mi,d1i,d2i,d3i,d4i,g1i,g2i为设计参数,i=1,2,3;为时变的设计参数,φ3i为第三个径向基神经网络的基函数,为未知参数θ3i的估计值,为未知参数θ2i的估计值。
51、本发明的有益效果是:
52、第一,本发明通过使用李雅普诺夫泛函(lyapunov-krasovskii function,lkf),使未知动态和外部时变扰动成为径向基神经网络(radial basis function neuralnetworks,rbfnns)逼近的有界函数,通过误差转换将有限时间预设性能函数(finite-timeprescribed performance function,ftppf)应用到三自由度水面无人艇的跟踪控制策略中,最终证明闭环系统的所有状态都是有界的,而且系统输出在有限时间内被限制在预设的范围内,实现跟踪误差在固定时间内收敛到零的小邻域内,使得跟踪误差快速收敛,稳态效果更好;
53、第二,设计了事件/自触发两种自适应控制器,减少网络中的数据传输量,降低通信通道的占用。然后,针对事件/自触发的两种触发机制,设计了1位解码编码机制,进一步的节省网络带宽资源。本发明显著降低了通讯成本,且具有较高的工程实用价值。
- 还没有人留言评论。精彩留言会获得点赞!