一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法
本发明涉及智能车辆路径跟踪控制领域,具体涉及一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法。
背景技术:
1、智能车辆的路径跟踪控制是实现自动驾驶的关键技术之一,其主要功能是控制车辆的前轮转角,使车辆能够沿着既定的参考路径行驶,尽量减小受控车辆与参考路径之间的偏差。
2、目前智能车的路径跟踪控制研究大多采用mpc算法,但该算法计算量大,无法满足无人车行驶时的实时性要求。而lqr控制方法虽然计算速度快,实时性好,但跟踪精度次于mpc控制方法,并且受车速变化影响大。因此,具体如何在车辆前轮转角控制时,既能加快计算速度,又能保证路径跟踪控制器的稳定性,同时具有较高的跟踪精度,就成为了本领域技术人员亟待解决的技术问题。
技术实现思路
1、本发明针对以上问题,提出了一种一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法,运用lyapunov稳定性理论,保证了路径跟踪控制器的稳定性,同时具有较高的跟踪精度。
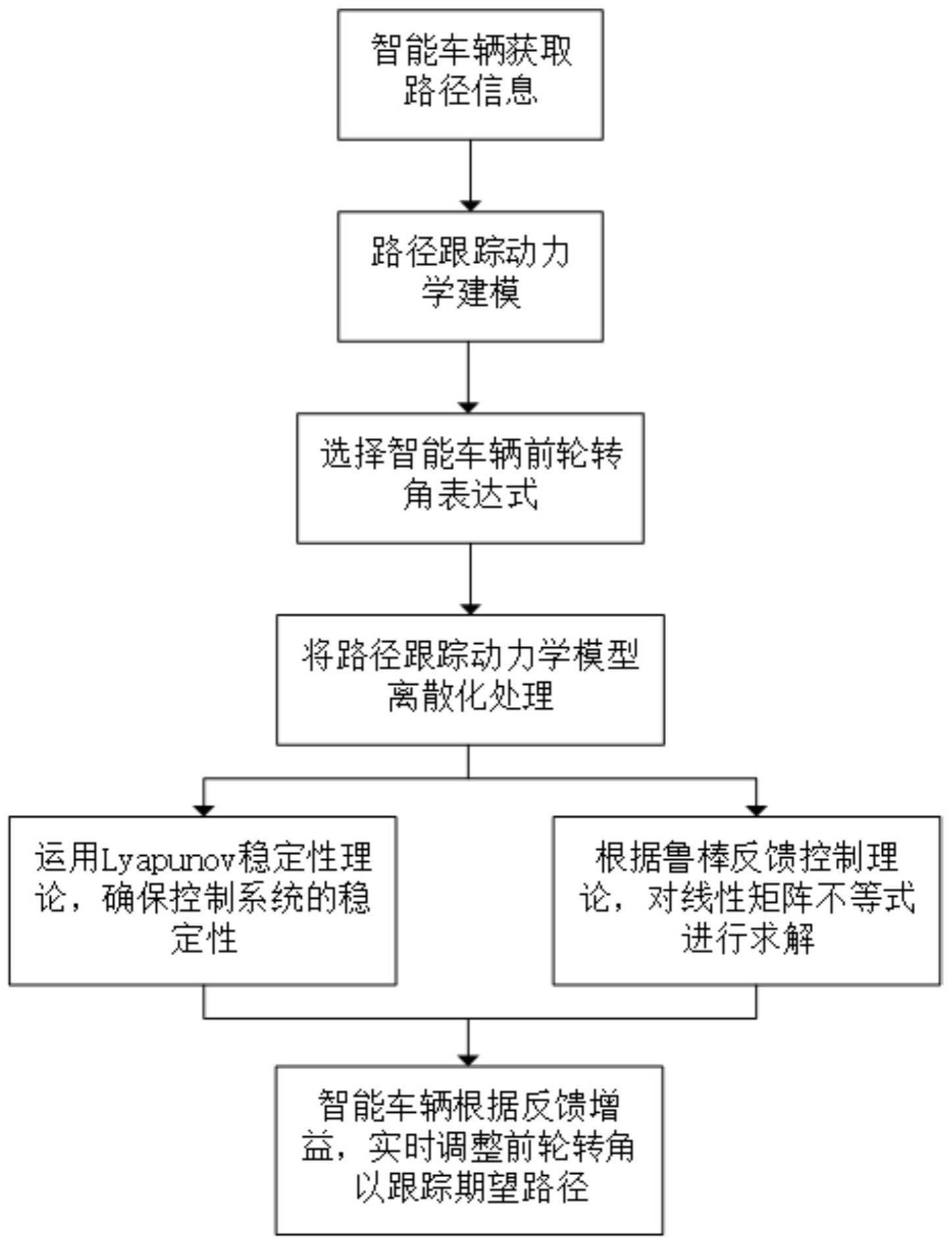
2、本发明的技术方案为:包括以下步骤:
3、步骤1:获取路径信息,智能车辆通过自身的传感器器获取参考路径的横向位移和参考航向角;
4、步骤2:基于二自由度车辆动力学模型,建立路径跟踪动力学模型;
5、
6、式中,a是状态矩阵;b是反馈矩阵;δf为智能车辆的前轮转角;x为误差状态矩阵;
7、步骤3:设计鲁棒反馈路径跟踪控制器,选择智能车辆前轮转角δf的表达式,即:
8、δf(k)=kx(k) (2)
9、式中,x(k)为输入的误差状态矩阵;k为反馈矩阵;
10、步骤4:建立路径跟踪误差模型,设计鲁棒反馈路径跟踪控制器对离散系统进行控制,通过求解合适的控制量,使目标函数的值最小;
11、步骤5:利用lyapunov稳定性理论,设计鲁棒反馈路径跟踪控制器,通过求解线性矩阵不等式,得到控制系统的反馈矩阵k;
12、步骤6:根据反馈增益k,智能车辆按照步骤3中前轮转角的表达式,根据步骤1获取的参考路径的信息,实时控制智能车辆的前轮转角,以实现车辆的路径跟踪。
13、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
14、本发明提供了一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法,在一定程度上改善了智能车辆路径跟踪时的实时性差,精确度较低等缺陷。本发明设计了一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法,通过建立车辆动力学模型和路径跟踪误差模型,利用lyapunov稳定性理论设计鲁棒反馈路径跟踪控制器,通过求解线性矩阵不等式求得反馈增益矩阵,不仅能够保证系统的稳定性,而且能够使智能车辆能够很好地跟踪期望路径。
技术特征:
1.一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法,其特征在于,步骤1中,状态矩阵a、反馈矩阵b、误差状态矩阵x表示为:
3.根据权利要求1所述的一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法,其特征在于,步骤4中的路径跟踪误差模型为:
4.根据权利要求1所述的一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法,其特征在于,步骤5中路径跟踪控制器的设计过程为:
5.根据权利要求1所述的一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法,其特征在于,步骤5中路径跟踪控制器的设计过程为:
技术总结
本发明公开了一种基于鲁棒反馈控制理论的智能车辆路径跟踪控制方法,涉及智能车辆路径跟踪控制领域。运用Lyapunov稳定性理论,保证了路径跟踪控制器的稳定性,同时具有较高的跟踪精度。包括以下步骤:获取路径信息;建立路径跟踪动力学模型;选择智能车辆前轮转角的表达式;建立路径跟踪误差模型;设计鲁棒反馈路径跟踪控制器,通过求解线性矩阵不等式,得到控制系统的反馈矩阵;根据反馈增益,最终动态调整前轮转角,实现车辆的路径跟踪。利用Lyapunov稳定性理论设计鲁棒反馈路径跟踪控制器,通过求解线性矩阵不等式求得反馈增益矩阵,不仅能够保证系统的稳定性,而且能够使智能车辆能够很好地跟踪期望路径。
技术研发人员:沈亚伟,赵又群,孙馨雨,李丹阳
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!