一种散货码头关于皮带秤统筹协助的控制方法及系统与流程
1.本发明涉及码头电子秤的软件管理技术领域,具体涉及一种散货码头关于皮带秤统筹协助的控制方法及系统。
背景技术:
2.卸船机、斗轮机、皮带输送机、装船机是相互协作完成散货码头流程装卸船作业的特种设备,在煤矿系统流程作业中是不可或缺的,其中卸船作业流程为:大型煤矿运输船-卸船机-皮带输送机-斗轮机-堆场;装船流程为堆场-斗轮机-皮带输送机-装船机-驳船。煤矿系统使用流程设备完成物料的集散疏运,即通过装卸船作业,完成散料如煤炭、矿砂的码头集散,在港口行业高速流转、集效、滚动式发展中发挥着重要的作用。为进一步响应国家加快推进建设智慧港口的战略方针,促进技术进步,达到科技兴港、科技强港的目的,使港口技术发展的速度能跟上经济快速发展的步伐,也为经营生产的降本提质增效,散货港口迫切需要提升生产管理的智能化水平,向智慧型、节能型转变,达成绿色健康可持续的目标。当前除极小数散货码头外,均依托安装于流程设备的电子称量设备完成生产作业量的监控和计量,电子称量设备包含皮带电子秤及斗轮机臂架秤,其中安装于卸船码头前沿的皮带电子秤可对卸船作业量及生产效率进行及时有效的统计、汇总,为大船卸船作业及靠离港计划制定提供参考;而安装于斗轮机悬臂的臂架秤及装驳码头前沿的皮带电子秤相互校验,互为冗余,可对驳船装载量及装船效率进行及时有效的监控和计量,并反馈至煤矿系统中央控制室(中控室)监控操作系统中,实现对装船作业过程中的物料进行即时、高效的闭环称量及数据反馈,使得“运出去”快速、高效,且“斤两不差”,提升驳船装载效率。但是,因为电子秤生产厂家不同,而每个品牌的产品拥有一套各自建设的独立管理控制系统,所以,散货码头往往因为现场复杂的使用工况而不得不使用不同种类的电子秤产品,从而导致了电子称量系统无法集成统一管理,无法在中控室监控操作系统上直观有效显示并应用于指导生产作业,辅助煤矿系统安全高效完成装卸船任务。种类繁多的电子秤管理控制系统,不仅不方便数据汇总、分析、处理,且管理难度大,还对技术人员要求高,这样大大增加了电子秤使用的人力、物力成本,且不能充分发挥电子秤对生产的辅助作用,提高生产效率。
技术实现要素:
3.有鉴于此,有必要针对上述的问题,提出一种散货码头关于皮带秤统筹协助的控制方法及系统,以解决上述背景技术中的缺点,本发明所解决的技术问题是如何实现对不同品牌、不同工况下使用的电子秤进行统一管控及集成显示,并且方便指导生产,从而提高生产效率,充分调动设备操作司机的主观能动性及减低中控室工作人员的劳动强度,提升码头服务质量。
4.为实现上述目的,本发明采取以下的技术方案:
5.本发明提出一种散货码头关于皮带秤统筹协助的控制方法,应用于一码头电子秤
通信服务系统,码头电子秤通信服务系统包括网关设备、应用服务器、装驳码头前沿地面皮带秤、斗轮机臂架秤和云端网络服务器,所述的应用服务器、装驳码头前沿地面皮带秤与斗轮机臂架秤三者之间均通过网关设备进行相互通信,应用服务器与云端网络服务器进行通信,该控制方法包括:
6.s1,输入与装船实时流程作业或卸船实时流程作业相关的控制指令;
7.s2,所述应用服务器接收于s1输入的相关控制指令并进行处理;
8.s3,所述斗轮机臂架秤将与装卸船实时流程作业对应的斗轮机臂架秤的物理信息发送至网关设备上,并接收网关设备下发的累计量清零指令和与装卸船实时流程作业对应的装驳码头前沿地面皮带秤的物理信息;
9.s4,所述网关设备将接收到的来自斗轮机臂架秤或应用服务器的数据信息进行集中打包,并将打包后的数据包分别发送至云端网络服务器和斗轮机臂架秤中;
10.s5,所述云端网络服务器和/或斗轮机臂架秤将接收到的数据包进行汇总、分析、处理并将其发送到应用服务器上;
11.s6,所述装驳码头前沿地面皮带秤将地面皮带秤的数据发送到应用服务器并接收应用服务器下发的累计量清零指令;
12.s7,所述应用服务器将于s6接收到的数据进行处理,并将数据处理结果进行显示输出。
13.进一步地,于s1之前,该控制方法还包括:
14.s100,于应用服务器内安装操作系统和虚拟化软件;
15.所述操作系统用于实现散货码头所有流程皮带秤统协管控并集成显示;
16.所述虚拟化软件用于对秤数据和虚拟化的应用服务器进行统筹管理。
17.进一步地,该控制方法于s1与s100之间还包括:
18.s200,所述应用服务器将接收到的电子秤数据并汇总于由虚拟化软件拟化出来的共享硬盘中;
19.s300,所述虚拟化软件将根据自身需求接收并分析处理用户所需数据,并将分析处理后的用户所需数据再次存储到回拟化的共享硬盘中;
20.s400,所述操作系统调用于s200中存储到的用户所需数据并完成所有流程皮带秤的集中显示功能、校零去皮功能以及装驳流程作业中斗轮机臂架秤和装驳码头前沿地面皮带秤的对比检验功能;
21.并且所述虚拟化软件调用于s200中存储到的用户所需数据,向云端网络服务器发送装驳码头前沿地面皮带秤的数据。
22.进一步地,所述应用服务器形成若干虚拟机;所述操作系统包括虚拟机操作平台和底层虚拟运行系统;
23.所述虚拟机操作平台作为为虚拟机提供正常运行的生态环境,用于映射虚拟机并完成所有电子秤统筹管控;
24.所述底层虚拟运行系统用于将所述应用服务器的物理硬件进行资源池化。
25.进一步地,所述底层虚拟运行系统将应用服务器的硬件资源池化,从而获得现场数据资源池、虚拟映射资源池和云端映射资源池;所述现场数据资源池为输入指令的集存储、处理及调用功能的资源整合池,用于调用由现场电子秤资源管理模块和指令输入模块
处理好的数据;所述虚拟映射资源池为统筹管控关于虚拟机资源的存储、运行及集成显示过程的现场集控资源池,用于将现场数据资源池中的已处理好的现场电子秤数据及外部输入指令进行数据映射并允许调用;所述云端映射资源池作为实现云端远程查看的资源池。
26.进一步地,所述虚拟化软件包括现场电子秤资源管理模块、数据处理调配模块、指令输入管理模块、虚拟机统筹管理模块、前端监控模块、装船码头前沿地面皮带秤管理模块、卸船码头前沿地面皮带秤管理模块、网络转发模块和远程云端查看管理模块;
27.所述现场电子秤资源管理模块用于将现场电子秤数据进行汇总、分析、处理及解码编译,并将现场电子秤数据发送至数据处理调配模块;
28.所述数据处理调配模块为数据的中转疏运站点,数据处理调配模块分别与虚拟机统筹管理模块、网络转发模块连接,数据处理调配模块用于向虚拟机统筹管理模块下发前端监控模块所需的资源,并发送由现场电子秤编译、处理后的数据及虚拟机统筹管控的数据;
29.所述指令输入管理模块用于将外部输入指令解码、编译,并将指令数据发送至数据处理调配模块;
30.所述虚拟机统筹管理模块用于调用虚拟生态虚拟池的虚拟映射资源池中的映射数据;
31.所述前端监控模块用于调用虚拟机统筹管理模块中的映射数据,并将处理结果分别发送至装船码头前沿地面皮带秤管理模块或卸船码头前沿地面皮带秤管理模块,并将处理好的数据发送至云端映射资源池中;
32.所述装船码头前沿地面皮带秤管理模块用于运用装船流程调度及部署策略对从前端监控模块获得的数据进行分析及处理;
33.所述卸船码头前沿地面皮带秤管理模块用于运用卸船流程调度及部署策略进行分析、处理从前端监控模块获得的数据;
34.所述网络转发模块用于辅助远程云端查看管理模块进行网络通信转发数据;
35.所述远程云端查看管理模块用于借助网络转发模块,运用内网和云端网络服务器,将云端映射资源池中的映射数据上传并存储至云端网络服务器,从而使云端用户借助云端app应用以了解现场电子秤实时作业信息和/或现场装卸船的生产情况。
36.进一步地,所述底层虚拟运行系统还用于运用由装船码头前沿地面皮带秤管理模块和卸船码头前沿地面皮带秤管理模块处理好的现场电子秤实时作业数据,并通过虚拟机操作平台将关于电子秤统筹管控的作业信息在虚拟机中显示出来,从而实现实时监控现场作业进度。
37.进一步地,s7包括以下子步骤:
38.s71,前端监控模块接收管理员的输入指令及中控室集控中心流程指令,若判断为装船流程,则装船码头前沿地面皮带秤管理模块开始投入,并运用装船流程调度及部署策略处理接收到的指令;
39.若判断为卸船流程,则卸船码头前沿地面皮带秤管理模块开始投入,并运用装船流程调度及部署策略处理接收到的指令;
40.s72,于装船流程中,装船码头前沿地面皮带秤管理模块基于不同作业流程的多元数据类型,判断、抽取待作业装船流程及相关电子秤,然后分析处理得到需要统筹管控的装
船流程现场电子秤实时作业数据;
41.s73,于卸船流程中,卸船码头前沿地面皮带秤管理模块基于不同作业流程的多元数据类型,判断、抽取待作业卸流程及相关电子秤,然后分析处理得到需要统筹管控的卸船流程现场电子秤的实时作业数据;
42.s74,前端监控模块在虚拟化层将不同流程的数据流映射到虚拟机内核模块中,并配置并行的队列;然后实时查验作业流程数据传输情况,依据数据流的负载情况优化传输权重并自适应调整和优化;所述不同流程包括装船流程和卸船流程。
43.进一步地,s7包括以下子步骤:
44.s701,接收管理员的输入指令及中控室集控中心流程指令,若为装船流程,则开始装船流程调度及部署策略功能,若为卸船流程,则开始卸船流程调度及部署策略功能;
45.s702,基于不同作业流程的多元数据类型,判断、抽取待作业装卸流程及相关电子秤;
46.s703,在虚拟化层将不同流程的数据流映射到虚拟机内核模块中,并配置并行的队列,实现不同任务进程的同时进行以及网络安全传输的隔离和管理;
47.s704,实时查验作业流程数据传输情况,依据数据流的负载情况优化传输权重并自适应调整和优化。
48.本发明又提出一种散货码头关于皮带秤统筹协助的控制系统,包括网关设备、应用服务器、装驳码头前沿地面皮带秤、斗轮机臂架秤和云端网络服务器,所述的应用服务器、装驳码头前沿地面皮带秤与斗轮机臂架秤三者之间均通过网关设备进行相互通信,应用服务器与云端网络服务器进行通信;所述应用服务器形成若干虚拟机;应用服务器内安装有操作系统和虚拟化软件;所述操作系统软件用于实现散货码头所有流程皮带秤统协管控并集成显示;所述操作系统包括虚拟机操作平台和底层虚拟运行系统;所述虚拟机操作平台作为为虚拟机提供正常运行的生态环境,用于映射虚拟机并完成所有电子秤统筹管控;所述底层虚拟运行系统用于将所述应用服务器的物理硬件进行资源池化;所述底层虚拟运行系统将应用服务器的硬件资源池化,从而获得现场数据资源池、虚拟映射资源池和云端映射资源池;所述现场数据资源池为输入指令的集存储、处理及调用功能的资源整合池,用于调用由现场电子秤资源管理模块和指令输入模块处理好的数据;所述虚拟映射资源池为统筹管控关于虚拟机资源的存储、运行及集成显示过程的现场集控资源池,用于将现场数据资源池中的已处理好的现场电子秤数据及外部输入指令进行数据映射并允许调用;所述云端映射资源池作为实现云端远程查看的资源池;所述虚拟化软件包括现场电子秤资源管理模块、数据处理调配模块、指令输入管理模块、虚拟机统筹管理模块、前端监控模块、装船码头前沿地面皮带秤管理模块、卸船码头前沿地面皮带秤管理模块、网络转发模块和远程云端查看管理模块;所述现场电子秤资源管理模块用于将现场电子秤数据进行汇总、分析、处理及解码编译,并将现场电子秤数据发送至数据处理调配模块;所述数据处理调配模块为数据的中转疏运站点,数据处理调配模块分别与虚拟机统筹管理模块、网络转发模块连接,数据处理调配模块用于向虚拟机统筹管理模块下发前端监控模块所需的资源,并发送由现场电子秤编译、处理后的数据及虚拟机统筹管控的数据;所述指令输入管理模块用于将外部输入指令解码、编译,并将指令数据发送至数据处理调配模块;所述虚拟机统筹管理模块用于调用虚拟生态虚拟池的虚拟映射资源池中的映射数据;所述前端监控模
块用于调用虚拟机统筹管理模块中的映射数据,并将处理结果分别发送至装船码头前沿地面皮带秤管理模块或卸船码头前沿地面皮带秤管理模块,并将处理好的数据发送至云端映射资源池中;所述装船码头前沿地面皮带秤管理模块用于运用装船流程调度及部署策略对从前端监控模块获得的数据进行分析及处理;所述卸船码头前沿地面皮带秤管理模块用于运用卸船流程调度及部署策略进行分析、处理从前端监控模块获得的数据;所述网络转发模块用于辅助远程云端查看管理模块进行网络通信转发数据;所述远程云端查看管理模块用于借助网络转发模块,运用内网和云端网络服务器,将云端映射资源池中的映射数据上传并存储至云端网络服务器,从而使云端用户借助云端app应用以了解现场电子秤实时作业信息和/或现场装卸船的生产情况。
49.本发明的有益效果为:
50.本发明的一种散货码头关于皮带秤统筹协助的控制方法及系统通过将现场所有电子秤表头整合到同一独立系统中,单独对表头进行数据读取、采集,实现对不同品牌、不同工况下使用的电子秤进行整合并统一管控,集成显示,并进一步将各个电子秤的秤表数据收纳、汇总、分析、处理,用于指导生产,提高散货港口的服务质量和水平;本发明实现了对不同工况下使用的不同品牌的电子秤进行整合、统筹管理,集成显示,且易于后续的兼容扩展,并将所有电子秤数据在中控室集成显示并将装船码头前沿地面皮带称数据发送至斗轮机臂架秤秤表,不仅能提高斗轮机司机的主观能动性、指导其完成装船作业任务,且可有效降低中控室工作人员的劳动强度,减低装船控料次数,实现一次控料装船,提高能源利用效率和服务质量,达到降本提质增效的目的。本发明还可与流程装船自动化系统融合,为自动化系统的建设及优化提供科学数据支持,从而提高散货港口的智能化生产管理水平,使散货港口由传统较多依靠人工的生产模式向智慧化的生产模式转变,降低流程作业过程中人员的参与和干预,降低事故的发生率,提高生产安全系数,为智慧化港口的探索和建设提供有力的技术支持。
附图说明
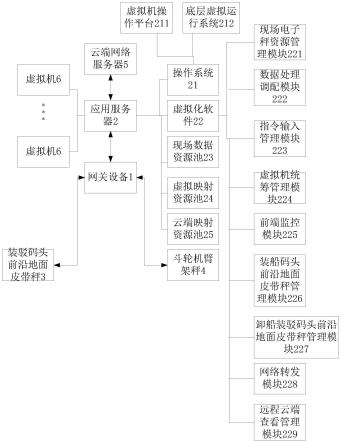
51.图1为本发明的一种散货码头关于皮带秤统筹协助的控制系统的结构示意图;
52.图2为本发明的一种散货码头关于皮带秤统筹协助的控制方法的工作流程图;
53.图3为本发明涉及的虚拟化软件的模块化原理图;
54.图4为本发明涉及的资源池、虚拟机操作平台及虚拟机的模块化原理图;
55.附图标记说明:
56.网关设备1;应用服务器2;装驳码头前沿地面皮带秤3;斗轮机臂架秤4;云端网络服务器5;虚拟机6;操作系统21;虚拟化软件22;现场数据资源池23;虚拟映射资源池24;云端映射资源池25;虚拟机操作平台211;底层虚拟运行系统212;现场电子秤资源管理模块221;数据处理调配模块222;指令输入管理模块223;虚拟机统筹管理模块224;前端监控模块225;装船码头前沿地面皮带秤管理模块226;卸船码头前沿地面皮带秤管理模块227;网络转发模块228;远程云端查看管理模块229。
具体实施方式
57.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发
明的技术方案作进一步清楚、完整地描述。需要说明的是,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
58.需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0059]“第一”、“第二”、“第三”、“第四”等术语仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”、“第四”特征可以明示或者隐含地包括一个或者更多个该特征。
[0060]
实施例1
[0061]
如图1-图4所示:
[0062]
本实施例提出一种散货码头关于皮带秤统筹协助的控制方法,应用于一码头电子秤通信服务系统,码头电子秤通信服务系统包括网关设备1、应用服务器2、装驳码头前沿地面皮带秤3、斗轮机臂架秤4和云端网络服务器5,所述的应用服务器2、装驳码头前沿地面皮带秤3与斗轮机臂架秤4三者之间均通过网关设备1进行相互通信,应用服务器2与云端网络服务器5进行通信,该控制方法包括:
[0063]
s1,输入与装船实时流程作业或卸船实时流程作业相关的控制指令;
[0064]
s2,所述应用服务器2接收于s1输入的相关控制指令并进行处理;
[0065]
s3,所述斗轮机臂架秤4将与装卸船实时流程作业对应的斗轮机臂架秤4的物理信息发送至网关设备1上,并接收网关设备1下发的累计量清零指令和与装卸船实时流程作业对应的装驳码头前沿地面皮带秤3的物理信息;
[0066]
s4,所述网关设备1将接收到的来自斗轮机臂架秤4或应用服务器2的数据信息进行集中打包,并将打包后的数据包分别发送至云端网络服务器5和斗轮机臂架秤4中;
[0067]
s5,所述云端网络服务器5和/或斗轮机臂架秤4将接收到的数据包进行汇总、分析、处理并将其发送到应用服务器2上;
[0068]
s6,所述装驳码头前沿地面皮带秤3将地面皮带秤的数据发送到应用服务器2并接收应用服务器2下发的累计量清零指令;
[0069]
s7,所述应用服务器2将于s6接收到的数据进行处理,并将数据处理结果进行显示输出。
[0070]
于本实施例进一步地,于s1之前,该控制方法还包括:
[0071]
s100,于应用服务器2内安装操作系统21和虚拟化软件22;
[0072]
所述操作系统21用于实现散货码头所有流程皮带秤统协管控并集成显示;另外,所述操作系统利用虚拟化软件并根据自身需求接收并分析处理所需数据,所述的操作系统将会调用该数据并完成所有流程皮带秤的集中显示、校零去皮功能及装驳流程作业中斗轮机臂架秤和装驳码头前沿地面皮带秤对比检验功能;
[0073]
所述虚拟化软件22用于对秤数据和虚拟化的应用服务器2进行统筹管理。
[0074]
具体地,本实施例的码头电子秤通信服务系统还包括与云端网络服务器5连接的液晶触摸显示器,液晶触摸显示器上实时显示设备编号、电子称品牌、型号、皮带带度、瞬时
流量和累计吨数据等;连接应用服务器的液晶触摸显示器具备作业称量预警、统计与信息查询以及计量校验功能,所述作业称量预警为系统设有超流量、比例超限、超吨报警提示功能。当皮带的瞬时流量超过额定流量时,必须在相应皮带的流量显示框中弹出超出额定流量的显示信息,信息持续保留三分钟,三分钟后自动消失;当装驳皮带计量双秤对比值超1%时发出语音报警;当装驳量快达到设置值后的语音提示预报警,装船流程已达到设定值时能够发出更高级别语音报警;所述统计与信息查询为系统可按时间段、驳船名称等查询作业信息,生成作业量信息统计报告、流量曲线报告、超流量信息报告能够保存导出pdf等(散货码头24小时不停工作业,分两个班次,每班次12个小时工作制,其中日班:8:00-20:00,夜班20:00-翌日8:00),其中流量曲线:以每段班(日班:8:00-20:00夜班20:00-翌日8:00)的形式生成流量曲线,供中控室工作人员选择日期、班次、机号)后生成显示;并具有生成pdf格式文件保存、打印功能;作业量信息:以每段班(日班:8:00-20:00夜班20:00-翌日8:00)的形式生成,供中控室工作人员选择日期、班次、机号、驳船名称)后显示;并具有生成pdf格式文件保存、打印功能;超流量信息:以每段班(日班:8:00-20:00夜班20:00-翌日8:00)的形式生成,详细列明超流量作业的机号、次数,每次超流量的起止时间,累计时长(以秒为单位计算,不足10秒可忽略不计),供中控室工作人员选择日期、班次后显示;并具有生成pdf格式文件保存、打印功能。
[0075]
具体地,本实施例的散货码头关于皮带秤统筹协助的控制系统将所有集成统协管理的皮带电子秤信息在液晶触摸显示器的同一界面上显示,同时中控室工作人员也可选择正在装卸船作业的涉及的地面皮带电子秤信息独立一个界面上监控显示。
[0076]
具体地,所述网关设备通过lora或5g通信协议分别与应用服务器、斗轮机臂架秤和云端网络服务器进行通信,不仅能很好的适应码头复杂、恶劣的使用工况,规避堆场料堆对于通讯的影响,且系统安装、维护便捷,能耗低。
[0077]
于本实施例进一步地,该控制方法于s1与s100之间还包括:
[0078]
s200,所述应用服务器2将接收到的电子秤数据并汇总于由虚拟化软件22拟化出来的共享硬盘中;
[0079]
s300,所述虚拟化软件22将根据自身需求接收并分析处理用户所需数据,并将分析处理后的用户所需数据再次存储到回拟化的共享硬盘中;
[0080]
s400,所述操作系统21调用于s200中存储到的用户所需数据并完成所有流程皮带秤的集中显示功能、校零去皮功能以及装驳流程作业中斗轮机臂架秤4和装驳码头前沿地面皮带秤3的对比检验功能;
[0081]
并且所述虚拟化软件22调用于s200中存储到的用户所需数据,向云端网络服务器5发送装驳码头前沿地面皮带秤3的数据。
[0082]
于本实施例进一步地,所述应用服务器2形成若干虚拟机6(具体为vm虚拟机);所述操作系统21包括虚拟机操作平台211和底层虚拟运行系统212;
[0083]
所述虚拟机操作平台211作为在底层虚拟运行平台上建立的为虚拟机6提供正常运行的生态环境,用于映射虚拟机6并完成所有电子秤统筹管控;
[0084]
所述底层虚拟运行系统212用于将所述应用服务器2的物理硬件进行资源池化;另外,底层虚拟运行系统212还用于将应用服务器的物理硬件资源池化,组成多个拥有独立cpu、内存、网络及存储资源的资源池,资源池之间采用网络通讯。
[0085]
于本实施例进一步地,所述底层虚拟运行系统212将应用服务器2的硬件资源池化,从而获得现场数据资源池23、虚拟映射资源池24和云端映射资源池25;所述现场数据资源池23为输入指令的集存储、处理及调用功能的资源整合池,用于调用由现场电子秤资源管理模块221和指令输入模块处理好的数据;所述虚拟映射资源池24为统筹管控关于虚拟机6资源的存储、运行及集成显示过程的现场集控资源池,用于将现场数据资源池23中的已处理好的现场电子秤数据及外部输入指令进行数据映射并允许调用;所述云端映射资源池25作为实现云端远程查看的资源池;而且,上述三个资源池之间通过网络进行数据交互。
[0086]
于本实施例进一步地,所述虚拟化软件22包括现场电子秤资源管理模块221、数据处理调配模块222、指令输入管理模块223、虚拟机统筹管理模块224、前端监控模块225、装船码头前沿地面皮带秤管理模块226、卸船码头前沿地面皮带秤管理模块227、网络转发模块228和远程云端查看管理模块229;
[0087]
所述现场电子秤资源管理模块221用于将现场电子秤数据进行汇总、分析、处理及解码编译,并将现场电子秤数据发送至数据处理调配模块222;
[0088]
所述数据处理调配模块222为数据的中转疏运站点,数据处理调配模块222分别与虚拟机统筹管理模块224、网络转发模块228连接,数据处理调配模块222用于向虚拟机统筹管理模块224下发前端监控模块225所需的资源,并发送由现场电子秤编译、处理后的数据及虚拟机6统筹管控的数据;
[0089]
所述指令输入管理模块223用于将外部输入指令解码、编译,并将指令数据发送至数据处理调配模块222;具体地,系统虚拟池中预先存储所有的装船流程或卸船流程的流程编号,当指令输入管理模块接收到有关流程启动信息时,甄别流程编号和该卸船流程启用到的卸船装驳码头前沿地面皮带秤编号,用于后续的统筹管控和集成显示;
[0090]
所述虚拟机统筹管理模块224用于调用虚拟生态虚拟池的虚拟映射资源池24中的映射数据;
[0091]
所述前端监控模块225用于调用虚拟机统筹管理模块224中的映射数据,并将处理结果分别发送至装船码头前沿地面皮带秤管理模块226或卸船码头前沿地面皮带秤管理模块227,并将处理好的数据发送至云端映射资源池25中;而且,所述前端监控模块225用于在将处理好的映射数据发送至装船码头前沿地面皮带秤管理模块226、卸船码头前沿地面皮带秤管理模块227的同时,前端监控模块225也将处理好的数据发送至云端映射资源池25中;
[0092]
所述装船码头前沿地面皮带秤管理模块226用于运用装船流程调度及部署策略对从前端监控模块225获得的数据进行分析及处理;而且,所述装船码头前沿地面皮带秤管理模块226用于依据多元流程作业信息融合判断并抽取的方法及用户对装船流程现场电子秤的统筹管理需求处理装船流程电子秤相关的实时作业信息;具体的,装船流程为:中控室上位机选定装船流程
‑‑
流程编号通过通讯链路发送至中控室集控cpu
‑‑
cpu流程启动确认
‑‑
现场流程启动安全确认
‑‑
流程启动:码头装船机启动
‑‑
地面皮带启动
‑‑
堆场斗轮机启动,从而完成散料货物由堆场至驳船的疏运过程;
[0093]
所述卸船码头前沿地面皮带秤管理模块227用于运用卸船流程调度及部署策略进行分析、处理从前端监控模块225获得的数据;具体的,卸船流程为:中控室上位机选定卸船流程
‑‑
流程编号通过通讯链路发送至中控室集控cpu
‑‑
cpu流程启动确认
‑‑
现场流程启动
安全确认
‑‑
流程启动:堆场斗轮机启动
‑‑
地面皮带启动
‑‑
卸船机启动,从而完成散料货物由大船至堆场的接卸过程;
[0094]
所述网络转发模块228用于辅助远程云端查看管理模块229进行网络通信转发数据;
[0095]
所述远程云端查看管理模块229用于借助网络转发模块228,运用内网(具体为公司内部网络)和云端网络服务器5完成云端映射资源池25中的映射数据上传并存储至云端网络服务器5,从而使云端用户借助云端app应用以了解现场电子秤实时作业信息和/或现场装卸船的生产情况。
[0096]
于本实施例进一步地,所述底层虚拟运行系统212还用于运用由装船码头前沿地面皮带秤管理模块226和卸船码头前沿地面皮带秤管理模块227处理好的现场电子秤实时作业数据,并通过虚拟机操作平台211将关于电子秤统筹管控的作业信息在虚拟机6中显示出来,从而实现实时监控现场作业进度。
[0097]
于本实施例进一步地,s7包括以下子步骤:
[0098]
s71,前端监控模块225接收管理员的输入指令及中控室集控中心流程指令,若判断为装船流程,则装船码头前沿地面皮带秤管理模块226开始投入,并运用装船流程调度及部署策略处理接收到的指令;
[0099]
若判断为卸船流程,则卸船码头前沿地面皮带秤管理模块227开始投入,并运用装船流程调度及部署策略处理接收到的指令;
[0100]
s72,于装船流程中,装船码头前沿地面皮带秤管理模块226基于不同作业流程的多元数据类型,判断、抽取待作业装船流程及相关电子秤,然后分析处理得到需要统筹管控的装船流程现场电子秤实时作业数据;具体地,相关电子秤包含装船流程前端斗轮机臂架秤和装船流程末端地面皮带秤;存储池内存储的每个流程编号都与装船码头前沿地面皮带秤和对应的斗轮机臂架秤一一对应,即流程一旦被选定,就可确定选用了哪条装船码头前沿地面秤和斗轮机臂架秤;
[0101]
s73,于卸船流程中,卸船码头前沿地面皮带秤管理模块227基于不同作业流程的多元数据类型,判断、抽取待作业卸流程及相关电子秤,然后分析处理得到需要统筹管控的卸船流程现场电子秤的实时作业数据;具体地,相关电子秤包含装船流程前端斗轮机臂架秤和装船流程末端地面皮带秤;存储池内存储的每个流程编号都与卸船码头前沿地面皮带秤一一对应,即流程一旦被选定,就可确定选用了哪条卸船码头前沿地面秤;
[0102]
s74,前端监控模块225在虚拟化层将不同流程的数据流映射到虚拟机6内核模块中,并配置并行的队列;然后实时查验作业流程数据传输情况,依据数据流的负载情况优化传输权重并自适应调整和优化;所述不同流程包括装船流程和卸船流程。
[0103]
如图1所示:
[0104]
本实施例又提出一种散货码头关于皮带秤统筹协助的控制系统,包括网关设备1、应用服务器2、装驳码头前沿地面皮带秤3、斗轮机臂架秤4和云端网络服务器5,所述的应用服务器2、装驳码头前沿地面皮带秤3与斗轮机臂架秤4三者之间均通过网关设备1进行相互通信,应用服务器2与云端网络服务器5进行通信;应用服务器2内安装有操作系统21和虚拟化软件22;所述操作系统21软件用于实现散货码头所有流程皮带秤统协管控并集成显示;所述应用服务器2形成若干虚拟机6;所述操作系统21包括虚拟机操作平台211和底层虚拟
运行系统212;所述虚拟机操作平台211作为在底层虚拟运行平台上建立的为虚拟机6提供正常运行的生态环境,用于映射虚拟机6并完成所有电子秤统筹管控;所述底层虚拟运行系统212用于将所述应用服务器2的物理硬件进行资源池化;所述底层虚拟运行系统212将应用服务器2的硬件资源池化,从而获得现场数据资源池23、虚拟映射资源池24和云端映射资源池25;所述现场数据资源池23为输入指令的集存储、处理及调用功能的资源整合池,用于调用由现场电子秤资源管理模块221和指令输入模块处理好的数据;所述虚拟映射资源池24为统筹管控关于虚拟机6资源的存储、运行及集成显示过程的现场集控资源池,用于将现场数据资源池23中的已处理好的现场电子秤数据及外部输入指令进行数据映射并允许调用;所述云端映射资源池25作为实现云端远程查看的资源池;所述虚拟化软件22包括现场电子秤资源管理模块221、数据处理调配模块222、指令输入管理模块223、虚拟机统筹管理模块224、前端监控模块225、装船码头前沿地面皮带秤管理模块226、卸船码头前沿地面皮带秤管理模块227、网络转发模块228和远程云端查看管理模块229;
[0105]
所述现场电子秤资源管理模块221用于将现场电子秤数据进行汇总、分析、处理及解码编译,并将现场电子秤数据发送至数据处理调配模块222;所述数据处理调配模块222为数据的中转疏运站点,数据处理调配模块222分别与虚拟机统筹管理模块224、网络转发模块228连接,数据处理调配模块222用于向虚拟机统筹管理模块224下发前端监控模块225所需的资源,并发送由现场电子秤编译、处理后的数据及虚拟机6统筹管控的数据;所述指令输入管理模块223用于将外部输入指令解码、编译,并将指令数据发送至数据处理调配模块222;所述虚拟机统筹管理模块224用于调用虚拟生态虚拟池的虚拟映射资源池24中的映射数据;所述前端监控模块225用于调用虚拟机统筹管理模块224中的映射数据,并将处理结果分别发送至装船码头前沿地面皮带秤管理模块226或卸船码头前沿地面皮带秤管理模块227,并将处理好的数据发送至云端映射资源池25中;所述装船码头前沿地面皮带秤管理模块226用于运用装船流程调度及部署策略对从前端监控模块225获得的数据进行分析及处理;所述卸船码头前沿地面皮带秤管理模块227用于运用卸船流程调度及部署策略进行分析、处理从前端监控模块225获得的数据;所述网络转发模块228用于辅助远程云端查看管理模块229进行网络通信转发数据;所述远程云端查看管理模块229用于借助网络转发模块228,运用内网和云端网络服务器5,将云端映射资源池25中的映射数据上传并存储至云端网络服务器5,从而使云端用户借助云端app应用了解现场电子秤实时作业信息和/或现场装卸船的生产情况。
[0106]
具体地,该散货码头关于皮带秤统筹协助的控制系统应用于一数据处理中心,该数据处理中心为可根据用户需求和现场实际工况而自行搭建的数据收集处理中枢,所述数据收集处理中心采用一台高性能的应用服务器2、预置的虚拟化软件22和操作系统21进行搭建;所述高性能应用服务器2的配置:不低于至强银牌,双cpu,每cpu至少10核;内存:4*32gb;电源:双电源,支持热插拔;网口:2*10gbe端口,4*1gbe端口;增加运行速度、运算能力及为后续的扩展提供条件;该数据处理中心可对外提供接口,数据存储安全达到raid10级,保证数据的安全性;将数据处理较多的软件子功能部署于数据处理中心,降低核心自动程序物理机的运算量,保证自动系统中程序数据处理快速性;将软件子功能部署于数据处理中心,虚拟化服务器存储系统应稳定、虚拟系统可复制性,保证数据系统易迁移性;将软件子功能部署于数据处理中心,可灵活扩展存储空间,保证数据存储的可拓展性。
[0107]
具体地,所述操作系统21软件为实现散货码头所有流程皮带秤统协管控并集成显示的操作系统,所述操作系统21采用vmware esxi操作系统为底层虚拟运行系统并将计算服务器物理硬件资源池化,组成多个拥有独立cpu、内存、网络及存储资源的资源池,资源池之间采用网络通讯;采用常用计算机操作系统如windows10为虚拟机操作平台211,在虚拟机操作平台映射虚拟机6并完成所有电子秤统筹管控。
[0108]
具体地,管理员指令及中控室集控指令经过数据链路下发至应用服务器2中,所述应用服务器2中采用底层虚拟运行系统212将其物理硬件资源池化,资源池分为三个:现场数据资源池23、虚拟映射资源池24以及云端映射资源池25;所述现场数据资源池23、虚拟映射资源池24以及云端映射资源池25均具备独立的cpu、内存、网络及存储资源,存储池之间通过网络进行数据交互,可实现数据传输网络隔离,提高数据传输安全及系统稳定性,所述虚拟机操作平台为在底层虚拟运行平台上建立的为虚拟机6提供能正常运行的生态环境,常用windows10;所述虚拟机6共享虚拟映射资源池24的cpu、内存、网络及存储资源,所述虚拟机6可在监控显示单元上单一画面或多画面显示,也可一个虚拟界面在一个显示器上显示,用户可根据需要进行分画面或分屏显示,达到统筹管控所有电子秤的功能。
[0109]
具体地,该散货码头关于皮带秤统筹协助的控制系统应用于一数据处理中心,所述数据处理中心将接收到的电子秤数据汇总于高性能服务器中由预置的虚拟化软件22拟化出来的资源池中,所述的操作系统利用虚拟化软件22并根据自身需求接收并分析处理所需数据,所有运行在上面的虚拟机6共享整个资源池的cpu、内存、网络及存储资源以及处理后得到的用户所需的数据,所述的操作系统将会调用该数据并完成所有流程皮带秤的集中显示、校零去皮功能及装驳流程作业中斗轮机臂架秤4和装驳码头前沿地面皮带秤3对比检验功能,达到指导生产的作用,所述的虚拟化软件22中的远程云端查看管理模块229也将调用处理完后资源池内的数据,依据云端app管理的设置、用户管理等不同条件,向云端网络服务器5发送流程皮带秤数据,方便云端用户远程查看生产作业情况,提高生产统筹协调效率及提高服务质量。
[0110]
具体地,所述指令输入管理模块223与数据处理调配模块222连接,用于捕抓用户使用鼠标及键盘的输入指令,包含下发现场所有电子秤校零、去皮指令;
[0111]
所述虚拟机统筹管理模块224与前端监控模块225连接,可将电子秤统筹管控系统中所需的监管数据发送至前端监控模块225;
[0112]
所述前端监控模块225分别与装船码头前沿地面皮带秤管理模块226和卸船码头前沿地面皮带秤管理模块连接227;
[0113]
所述前端监控模块225可将接受到的数据辨识并按功能队列并行分配置装船码头前沿地面皮带秤管理模块226和卸船码头前沿地面皮带秤管理模块227;
[0114]
所述装船码头前沿地面皮带秤管理模块226为装船流程作业前端显示的数据处理和监控单元,所述卸船码头前沿地面皮带秤管理模块227为卸船流程作业前端显示的数据处理和监控单元;
[0115]
所述网络转发模块228分别与数据处理调配模块、前端监控模块连接,用于转发现场电子秤、作业流程编译、处理后的数据及前端监控模块225统筹管控信息;
[0116]
所述远程云端查看管理模块229连接与网络转发模块228连接,借助公司内网与云端网络服务器5完成数据上传云端,并根据个性化需求,依据不同用户等级分类编辑、处理,
并在云端应用上显示来自现场电子秤资源管理模块221的数据;
[0117]
所述云端应用将根据不同用户等级(一般用户、管理员、操作员),在远程云端查看管理模块229中获取相应数据并显示;其中装船码头前沿地面皮带秤管理模块226的数据处理流程包含以下与功能相关的物理量:瞬时流量(t/h)、累计流量(t)、皮带带速(m/s)、装驳起止时间、装驳效率(t/h),卸船码头前沿地面皮带秤管理模块227的处理数据包含:瞬时流量(t/h)、累计卸船量(t)、皮带带速(m/s)、卸船起止时间、卸船效率(t/h)、远程云端查看管理模块(含云端app操作、设置、登录、用户管理)。
[0118]
实施例2
[0119]
如图1-图2所示:
[0120]
本实施例提出一种散货码头关于皮带秤统筹协助的控制方法,应用于一码头电子秤通信服务系统,码头电子秤通信服务系统包括网关设备1、应用服务器2、装驳码头前沿地面皮带秤3、斗轮机臂架秤4和云端网络服务器5,所述的应用服务器2、装驳码头前沿地面皮带秤3与斗轮机臂架秤4三者之间均通过网关设备1进行相互通信,应用服务器2与云端网络服务器5进行通信,该控制方法包括:
[0121]
s1,输入与装船实时流程作业或卸船实时流程作业相关的控制指令;
[0122]
s2,所述应用服务器2接收于s1输入的相关控制指令并进行处理;
[0123]
s3,所述斗轮机臂架秤4将与装卸船实时流程作业对应的斗轮机臂架秤4的物理信息发送至网关设备1上,并接收网关设备1下发的累计量清零指令和与装卸船实时流程作业对应的装驳码头前沿地面皮带秤3的物理信息;
[0124]
s4,所述网关设备1将接收到的来自斗轮机臂架秤4或应用服务器2的数据信息进行集中打包,并将打包后的数据包分别发送至云端网络服务器5和斗轮机臂架秤4中;
[0125]
s5,所述云端网络服务器5和/或斗轮机臂架秤4将接收到的数据包进行汇总、分析、处理并将其发送到应用服务器2上;
[0126]
s6,所述装驳码头前沿地面皮带秤3将地面皮带秤的数据发送到应用服务器2并接收应用服务器2下发的累计量清零指令;
[0127]
s7,所述应用服务器2将于s6接收到的数据进行处理,并将数据处理结果进行显示输出。
[0128]
于本实施例进一步地,s7包括以下子步骤:
[0129]
s701,接收管理员的输入指令及中控室集控中心流程指令,若为装船流程,则开始装船流程调度及部署策略功能,若为卸船流程,则开始卸船流程调度及部署策略功能;
[0130]
s702,基于不同作业流程的多元数据类型,判断、抽取待作业装卸流程及相关电子秤;
[0131]
s703,在虚拟化层将不同流程的数据流映射到虚拟机内核模块中,并配置并行的队列,实现不同任务进程的同时进行以及网络安全传输的隔离和管理;
[0132]
s704,实时查验作业流程数据传输情况,依据数据流的负载情况优化传输权重并自适应调整和优化。
[0133]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保
护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1