一种基于移动巡检机器人的室内生产线巡检方法及装置与流程
1.本发明涉及机器人控制技术领域,尤其涉及一种基于移动巡检机器人的室内生产线巡检方法及装置。
背景技术:
2.随着机器人的技术越来越成熟,将不同应用的移动机器人应用在各个技术领域中也是越来越多,并且能够进行集中管理和集中控制,同时提升工作效率并且能够减少人力物力支出;但在现有技术中,对于室内生产线的巡检一般还是采用人工定时巡检的方式,这样一来将需要较多的人力物力投入才能得以维持,并且人工定时巡检的方式,巡检效率较低。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,本发明提供了一种基于移动巡检机器人的室内生产线巡检方法及装置,可以实现远程控制移动巡检机器人对进行精确的移动巡检工作,提升巡检效率。
4.为了解决上述技术问题,本发明实施例还提供了一种基于移动机巡检器人的室内生产线巡检方法,所述方法包括:
5.云端服务器获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置;
6.所述云端服务器基于所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置在巡检地图上生成巡检初始规划路径;
7.基于所述无线ap定位系统对所述移动巡检机器人的当前位置进行定位处理,获得当前定位位置;
8.所述云端服务器基于所述当前定位位置控制所述移动巡检机人运动至所述室内生产线巡检的起点,并将所述巡检初始规划路径加载至所述移动巡检机器人;
9.所述云端服务器控制所述移动巡检机器人按照所述巡检初始规划路径进行巡检作业。
10.可选的,所述云端服务器获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置,包括:
11.所述云端服务器接收用户基于操作终端输入的巡检数据方式获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置。
12.可选的,所述云端服务器基于所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置在巡检地图上生成巡检初始规划路径,包括:
13.在所述云端服务器上获得巡检地图,并将所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置标记在所述巡检地图上;
14.所述云端服务器基于标记的巡检地图按照最短巡检路径生成巡检初始规划路径。
15.可选的,所述在所述云端服务器上获得巡检地图,并将所述室内生产线巡检的起
点、终点及室内生产线巡检关键点位置标记在所述巡检地图上,包括:
16.在所述云端服务器上根据所述室内生产线位置进行匹配,获得对应的巡检地图;
17.将所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置按照先后顺序标记在所述巡检地图上。
18.可选的,所述基于所述无线ap定位系统对所述移动巡检机器人的当前位置进行定位处理,获得当前定位位置,包括:
19.所述移动巡检机器人实时采集所述无线ap定位系统中的rssi信号数据;
20.基于采集到的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果;
21.基于所述欧式距离计算结果选择信号强度最强的ap热点进行无线ap热点连接,并在连接后基于加权领近算法在预设的rssi信号位置数据库中进行位置匹配,获得所述移动巡检机器人的当前定位位置。
22.可选的,所述基于采集到的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果,包括:
23.对采集到的rssi信号利用残差去粗大误差算法进行粗大误差去除处理,获得去除误差的rssi信号;
24.利用限幅与算术平均滤波算法对去除误差的rssi信号进行滤波处理,获得滤波后的rssi信号;
25.利用滤波后的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果。
26.可选的,所述基于所述欧式距离计算结果选择信号强度最强的ap热点进行无线ap热点连接,并在连接后基于加权领近算法在预设的rssi信号位置数据库中进行位置匹配,获得所述移动巡检机器人的当前定位位置,包括:
27.根据所述欧式距离计算结果进行最小距离距离处理,获得欧式距离最小聚类中心,并基于欧式距离最小聚类中心选择信号强度最强的ap热点进行无线ap热点连接;
28.基于所述无线ap热点连接对应的rssi信号在预设的rssi信号位置数据库中利用加权领近算法匹配出所述移动巡检机器人的当前定位位置;
29.所述预设的rssi信号位置数据库为通过无线ap定位系统中的每个无线ap发射的rssi信号的每个信号强度的等级的坐标位置所构建的数据库。
30.可选的,所述云端服务器基于所述当前定位位置控制所述移动巡检机人运动至所述室内生产线巡检的起点,包括:
31.所述云端服务器基于所述当前定位位置及所述室内生成线巡检的起点生成最短运动路径,并控制所述移动巡检机器人基于所述最短运动路径运动至所述室内生产线巡检的起点。
32.可选的,所述云端服务器控制所述移动巡检机器人按照所述巡检初始规划路径进行巡检作业时,还包括:
33.所述云端服务器控制所述移动巡检机器人启动实时视频采集传感器进行巡检路径上的实时视频采集处理,并获得实时采集视频;
34.所述云端服务器基于所述实时采集视频识别所述移动巡检机器人在所巡检初始规划路径上移动时的障碍物识别处理,并在识别到对应的障碍物时,对所述障碍物进行三维重建处理,获得障碍物的三维重建模型;
35.所述云端服务器基于所述障碍物的三维重建模型控制所述移动巡检机器人沿所述三维重建模型周边绕过所述障碍物,并回归所述巡检初始规划路径上继续进行巡检处理。
36.另外,本发明实施例还提供了一种基于移动机巡检器人的室内生产线巡检装置,所述装置包括:
37.获得模块:用于云端服务器获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置;
38.路径生成模块:用于所述云端服务器基于所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置在巡检地图上生成巡检初始规划路径;
39.定位处理模块:用于基于所述无线ap定位系统对所述移动巡检机器人的当前位置进行定位处理,获得当前定位位置;
40.移动模块:用于所述云端服务器基于所述当前定位位置控制所述移动巡检机人运动至所述室内生产线巡检的起点,并将所述巡检初始规划路径加载至所述移动巡检机器人;
41.巡检模块:用于所述云端服务器控制所述移动巡检机器人按照所述巡检初始规划路径进行巡检作业。
42.在本发明实施例中,通过云端服务器生成巡检规划初始路径,并控制移动巡检机器人按照巡检规划初始路径进行巡检工作,实现了工作人员在远端通过云端服务器同时控制多个移动巡检机器人按照巡检规划初始路径进行巡检工作,可以有效的较少巡检工作中的人力物力支出,同时可以远程控制移动巡检机器人对进行精确的移动巡检工作,提升巡检效率。
附图说明
43.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
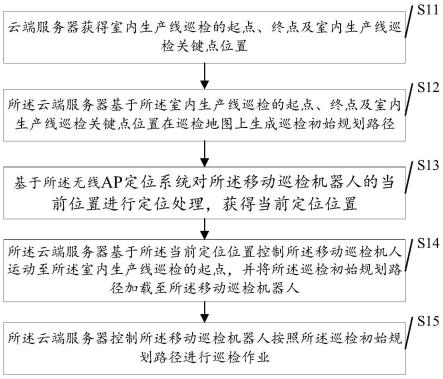
44.图1是本发明实施例中的基于移动巡检机器人的室内生产线巡检方法的流程示意图;
45.图2是本发明实施例中的基于移动巡检机器人的室内生产线巡检装置的结构组成示意图。
具体实施方式
46.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
47.实施例一
48.请参阅图1,图1是本发明实施例中的基于移动巡检机器人的室内生产线巡检方法
的流程示意图。
49.如图1所示,一种基于移动机巡检器人的室内生产线巡检方法,所述方法包括:
50.s11:云端服务器获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置;
51.在本发明具体实施过程中,所述云端服务器获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置,包括:所述云端服务器接收用户基于操作终端输入的巡检数据方式获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置。
52.具体的,用户通过所使用的操作终端登录该云端服务器,并在相应的界面上输入巡检数据方式来获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置等数据。
53.s12:所述云端服务器基于所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置在巡检地图上生成巡检初始规划路径;
54.在本发明具体实施过程中,所述云端服务器基于所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置在巡检地图上生成巡检初始规划路径,包括:在所述云端服务器上获得巡检地图,并将所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置标记在所述巡检地图上;所述云端服务器基于标记的巡检地图按照最短巡检路径生成巡检初始规划路径。
55.进一步的,所述在所述云端服务器上获得巡检地图,并将所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置标记在所述巡检地图上,包括:在所述云端服务器上根据所述室内生产线位置进行匹配,获得对应的巡检地图;将所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置按照先后顺序标记在所述巡检地图上。
56.具体的,在该云端服务器上通过匹配的方式获得巡检地图,并且将室内生产线巡检的起点、终点及室内生产线巡检关键点位置标记在所述巡检地图上;然后该云端服务器再根据标记的巡检地图按照最短巡检路径生成巡检初始规划路径。
57.即在云端服务器上根据室内生产线位置进行匹配的方式来获得对应的巡检地图;然后将室内生产线巡检的起点、终点及室内生产线巡检关键点位置按照先后顺序标记在所述巡检地图上。
58.s13:基于所述无线ap定位系统对所述移动巡检机器人的当前位置进行定位处理,获得当前定位位置;
59.在本发明具体实施过程中,所述基于所述无线ap定位系统对所述移动巡检机器人的当前位置进行定位处理,获得当前定位位置,包括:所述移动巡检机器人实时采集所述无线ap定位系统中的rssi信号数据;基于采集到的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果;基于所述欧式距离计算结果选择信号强度最强的ap热点进行无线ap热点连接,并在连接后基于加权领近算法在预设的rssi信号位置数据库中进行位置匹配,获得所述移动巡检机器人的当前定位位置。
60.进一步的,所述基于采集到的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果,包括:对采集到的rssi信号利用残差去粗大误差算法进行粗大误差去除处理,获得去除误差的rssi信号;利用限幅与算术平均滤波算法对去除误差的rssi信号进行滤波处理,获得滤波后的rssi信号;利用滤波后的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果。
61.进一步的,所述基于所述欧式距离计算结果选择信号强度最强的ap热点进行无线ap热点连接,并在连接后基于加权领近算法在预设的rssi信号位置数据库中进行位置匹配,获得所述移动巡检机器人的当前定位位置,包括:根据所述欧式距离计算结果进行最小距离距离处理,获得欧式距离最小聚类中心,并基于欧式距离最小聚类中心选择信号强度最强的ap热点进行无线ap热点连接;基于所述无线ap热点连接对应的rssi信号在预设的rssi信号位置数据库中利用加权领近算法匹配出所述移动巡检机器人的当前定位位置;所述预设的rssi信号位置数据库为通过无线ap定位系统中的每个无线ap发射的rssi信号的每个信号强度的等级的坐标位置所构建的数据库。
62.具体的,在该移动巡检机器人上设置有ap热点连接设备,并通过该ap热点连接设备实时的采集无线ap定位系统中的rssi信号;并且在采集到rssi信号进行欧式距离的计算处理,并得到欧式距离计算结果;通过欧式距离计算结果来选择信号强度最强的ap热点对应的rssi信号进行无线ap热点连接,然后在连接之后根据加权领近算法在预设的rssi信号位置数据库中进行位置匹配,从而获得移动巡检机器人的当前定位位置。
63.在进行欧式距离计算的时候,首先需要对采集到的rssi信号利用残差去粗大误差算法进行粗大误差去除处理,获得去除误差的rssi信号;在本技术中利用残差去粗大误差算法进行处理,可以去除rssi信号在强脉冲干扰或者环境干扰造成rssi信号偏离真实的较大误差,可以有效的去除明显超出了正常的误差范围;在获得去除误差的rssi信号之后,还需要利用限幅与算术平均滤波算法对去除误差的rssi信号进行滤波处理,获得滤波后的rssi信号;即为了获得更精确的rssi信号,需要对去除误差的rssi信号进行平滑滤波处理,在本技术中平滑滤波采用的是限幅滤波算法和算术平均滤波算法结合进行,这样可以弥补单一滤波的不足,限幅滤波算法有效克服粗大误差引起的大脉冲干扰避免其对算术平均滤波算法的影响;算术平均滤波算法能有效克服随机噪声引起的波段干扰;最后再利用滤波后的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果。
64.在进行位置匹配时,需要根据欧式距离计算结果进行最小距离距离处理,从而获得欧式距离最小聚类中心,并根据欧式距离最小聚类中心选择信号强度最强的ap热点进行无线ap热点连接;然后在根据无线ap热点连接对应的rssi信号在预设的rssi信号位置数据库中利用加权领近算法匹配出所述移动巡检机器人的当前定位位置;该预设的rssi信号位置数据库为通过无线ap定位系统中的每个无线ap发射的rssi信号的每个信号强度的等级的坐标位置所构建的数据库。
65.s14:所述云端服务器基于所述当前定位位置控制所述移动巡检机人运动至所述室内生产线巡检的起点,并将所述巡检初始规划路径加载至所述移动巡检机器人;
66.在本发明具体实施过程中,所述云端服务器基于所述当前定位位置控制所述移动巡检机人运动至所述室内生产线巡检的起点,包括:所述云端服务器基于所述当前定位位置及所述室内生成线巡检的起点生成最短运动路径,并控制所述移动巡检机器人基于所述最短运动路径运动至所述室内生产线巡检的起点。
67.具体的,该云端服务器根据当前定位位置及室内生成线巡检的起点生成最短运动路径,然后控制移动巡检机器人按照最短运动路径运动至室内生产线巡检的起点。
68.s15:所述云端服务器控制所述移动巡检机器人按照所述巡检初始规划路径进行巡检作业。
69.在本发明具体实施过程中,所述云端服务器控制所述移动巡检机器人按照所述巡检初始规划路径进行巡检作业时,还包括:所述云端服务器控制所述移动巡检机器人启动实时视频采集传感器进行巡检路径上的实时视频采集处理,并获得实时采集视频;所述云端服务器基于所述实时采集视频识别所述移动巡检机器人在所巡检初始规划路径上移动时的障碍物识别处理,并在识别到对应的障碍物时,对所述障碍物进行三维重建处理,获得障碍物的三维重建模型;所述云端服务器基于所述障碍物的三维重建模型控制所述移动巡检机器人沿所述三维重建模型周边绕过所述障碍物,并回归所述巡检初始规划路径上继续进行巡检处理。
70.具体的,在该移动巡检机器人上设置有视频采集传感器,在云端服务器控制移动巡检机器人按照巡检初始规划路径进行巡检时,启动设置在移动巡检机器人上的视频采集传感器来进行巡检路径上的实时视频采集处理,并获得实时采集视频;将这些实施采集视频上传至云端服务器中,在云端服务器中利用内置的障碍物识别算法对实时采集视频中的移动巡检机器人在巡检初始规划路径上移动时的障碍物识别处理,并得到识别障碍物,并在识别到对应的障碍物之后,对障碍物进行三维重建处理,获得障碍物的三维重建模型;然后就是该云端服务器根据该障碍物的三维重建模型来控制该移动巡检机器人沿着三维重建模型周边绕过障碍物,并回归巡检初始规划路径上继续进行巡检处理。
71.在本发明实施例中,通过云端服务器生成巡检规划初始路径,并控制移动巡检机器人按照巡检规划初始路径进行巡检工作,实现了工作人员在远端通过云端服务器同时控制多个移动巡检机器人按照巡检规划初始路径进行巡检工作,可以有效的较少巡检工作中的人力物力支出,同时可以远程控制移动巡检机器人对进行精确的移动巡检工作,提升巡检效率。
72.实施例二
73.请参阅图2,图2是本发明实施例中的基于移动巡检机器人的室内生产线巡检装置的结构组成示意图。
74.如图2所示,一种基于移动机巡检器人的室内生产线巡检装置,所述装置包括:
75.获得模块21:用于云端服务器获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置;
76.在本发明具体实施过程中,所述云端服务器获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置,包括:所述云端服务器接收用户基于操作终端输入的巡检数据方式获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置。
77.具体的,用户通过所使用的操作终端登录该云端服务器,并在相应的界面上输入巡检数据方式来获得室内生产线巡检的起点、终点及室内生产线巡检关键点位置等数据。
78.路径生成模块22:用于所述云端服务器基于所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置在巡检地图上生成巡检初始规划路径;
79.在本发明具体实施过程中,所述云端服务器基于所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置在巡检地图上生成巡检初始规划路径,包括:在所述云端服务器上获得巡检地图,并将所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置标记在所述巡检地图上;所述云端服务器基于标记的巡检地图按照最短巡检路径生成巡检初始规划路径。
80.进一步的,所述在所述云端服务器上获得巡检地图,并将所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置标记在所述巡检地图上,包括:在所述云端服务器上根据所述室内生产线位置进行匹配,获得对应的巡检地图;将所述室内生产线巡检的起点、终点及室内生产线巡检关键点位置按照先后顺序标记在所述巡检地图上。
81.具体的,在该云端服务器上通过匹配的方式获得巡检地图,并且将室内生产线巡检的起点、终点及室内生产线巡检关键点位置标记在所述巡检地图上;然后该云端服务器再根据标记的巡检地图按照最短巡检路径生成巡检初始规划路径。
82.即在云端服务器上根据室内生产线位置进行匹配的方式来获得对应的巡检地图;然后将室内生产线巡检的起点、终点及室内生产线巡检关键点位置按照先后顺序标记在所述巡检地图上。
83.定位处理模块23:用于基于所述无线ap定位系统对所述移动巡检机器人的当前位置进行定位处理,获得当前定位位置;
84.在本发明具体实施过程中,所述基于所述无线ap定位系统对所述移动巡检机器人的当前位置进行定位处理,获得当前定位位置,包括:所述移动巡检机器人实时采集所述无线ap定位系统中的rssi信号数据;基于采集到的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果;基于所述欧式距离计算结果选择信号强度最强的ap热点进行无线ap热点连接,并在连接后基于加权领近算法在预设的rssi信号位置数据库中进行位置匹配,获得所述移动巡检机器人的当前定位位置。
85.进一步的,所述基于采集到的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果,包括:对采集到的rssi信号利用残差去粗大误差算法进行粗大误差去除处理,获得去除误差的rssi信号;利用限幅与算术平均滤波算法对去除误差的rssi信号进行滤波处理,获得滤波后的rssi信号;利用滤波后的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果。
86.进一步的,所述基于所述欧式距离计算结果选择信号强度最强的ap热点进行无线ap热点连接,并在连接后基于加权领近算法在预设的rssi信号位置数据库中进行位置匹配,获得所述移动巡检机器人的当前定位位置,包括:根据所述欧式距离计算结果进行最小距离距离处理,获得欧式距离最小聚类中心,并基于欧式距离最小聚类中心选择信号强度最强的ap热点进行无线ap热点连接;基于所述无线ap热点连接对应的rssi信号在预设的rssi信号位置数据库中利用加权领近算法匹配出所述移动巡检机器人的当前定位位置;所述预设的rssi信号位置数据库为通过无线ap定位系统中的每个无线ap发射的rssi信号的每个信号强度的等级的坐标位置所构建的数据库。
87.具体的,在该移动巡检机器人上设置有ap热点连接设备,并通过该ap热点连接设备实时的采集无线ap定位系统中的rssi信号;并且在采集到rssi信号进行欧式距离的计算处理,并得到欧式距离计算结果;通过欧式距离计算结果来选择信号强度最强的ap热点对应的rssi信号进行无线ap热点连接,然后在连接之后根据加权领近算法在预设的rssi信号位置数据库中进行位置匹配,从而获得移动巡检机器人的当前定位位置。
88.在进行欧式距离计算的时候,首先需要对采集到的rssi信号利用残差去粗大误差算法进行粗大误差去除处理,获得去除误差的rssi信号;在本技术中利用残差去粗大误差算法进行处理,可以去除rssi信号在强脉冲干扰或者环境干扰造成rssi信号偏离真实的较
大误差,可以有效的去除明显超出了正常的误差范围;在获得去除误差的rssi信号之后,还需要利用限幅与算术平均滤波算法对去除误差的rssi信号进行滤波处理,获得滤波后的rssi信号;即为了获得更精确的rssi信号,需要对去除误差的rssi信号进行平滑滤波处理,在本技术中平滑滤波采用的是限幅滤波算法和算术平均滤波算法结合进行,这样可以弥补单一滤波的不足,限幅滤波算法有效克服粗大误差引起的大脉冲干扰避免其对算术平均滤波算法的影响;算术平均滤波算法能有效克服随机噪声引起的波段干扰;最后再利用滤波后的rssi信号进行信号欧式距离计算处理,获得欧式距离计算结果。
89.在进行位置匹配时,需要根据欧式距离计算结果进行最小距离距离处理,从而获得欧式距离最小聚类中心,并根据欧式距离最小聚类中心选择信号强度最强的ap热点进行无线ap热点连接;然后在根据无线ap热点连接对应的rssi信号在预设的rssi信号位置数据库中利用加权领近算法匹配出所述移动巡检机器人的当前定位位置;该预设的rssi信号位置数据库为通过无线ap定位系统中的每个无线ap发射的rssi信号的每个信号强度的等级的坐标位置所构建的数据库。
90.移动模块24:用于所述云端服务器基于所述当前定位位置控制所述移动巡检机人运动至所述室内生产线巡检的起点,并将所述巡检初始规划路径加载至所述移动巡检机器人;
91.在本发明具体实施过程中,所述云端服务器基于所述当前定位位置控制所述移动巡检机人运动至所述室内生产线巡检的起点,包括:所述云端服务器基于所述当前定位位置及所述室内生成线巡检的起点生成最短运动路径,并控制所述移动巡检机器人基于所述最短运动路径运动至所述室内生产线巡检的起点。
92.具体的,该云端服务器根据当前定位位置及室内生成线巡检的起点生成最短运动路径,然后控制移动巡检机器人按照最短运动路径运动至室内生产线巡检的起点。
93.巡检模块25:用于所述云端服务器控制所述移动巡检机器人按照所述巡检初始规划路径进行巡检作业。
94.在本发明具体实施过程中,所述云端服务器控制所述移动巡检机器人按照所述巡检初始规划路径进行巡检作业时,还包括:所述云端服务器控制所述移动巡检机器人启动实时视频采集传感器进行巡检路径上的实时视频采集处理,并获得实时采集视频;所述云端服务器基于所述实时采集视频识别所述移动巡检机器人在所巡检初始规划路径上移动时的障碍物识别处理,并在识别到对应的障碍物时,对所述障碍物进行三维重建处理,获得障碍物的三维重建模型;所述云端服务器基于所述障碍物的三维重建模型控制所述移动巡检机器人沿所述三维重建模型周边绕过所述障碍物,并回归所述巡检初始规划路径上继续进行巡检处理。
95.具体的,在该移动巡检机器人上设置有视频采集传感器,在云端服务器控制移动巡检机器人按照巡检初始规划路径进行巡检时,启动设置在移动巡检机器人上的视频采集传感器来进行巡检路径上的实时视频采集处理,并获得实时采集视频;将这些实施采集视频上传至云端服务器中,在云端服务器中利用内置的障碍物识别算法对实时采集视频中的移动巡检机器人在巡检初始规划路径上移动时的障碍物识别处理,并得到识别障碍物,并在识别到对应的障碍物之后,对障碍物进行三维重建处理,获得障碍物的三维重建模型;然后就是该云端服务器根据该障碍物的三维重建模型来控制该移动巡检机器人沿着三维重
建模型周边绕过障碍物,并回归巡检初始规划路径上继续进行巡检处理。
96.在本发明实施例中,通过云端服务器生成巡检规划初始路径,并控制移动巡检机器人按照巡检规划初始路径进行巡检工作,实现了工作人员在远端通过云端服务器同时控制多个移动巡检机器人按照巡检规划初始路径进行巡检工作,可以有效的较少巡检工作中的人力物力支出,同时可以远程控制移动巡检机器人对进行精确的移动巡检工作,提升巡检效率。
97.本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器(rom,readonly memory)、随机存取存储器(ram,random access memory)、磁盘或光盘等。
98.另外,以上对本发明实施例所提供的一种基于移动巡检机器人的室内生产线巡检方法及装置进行了详细介绍,本文中应采用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1