一种基于粒子群的多峰值最大功率追踪的控制方法与流程
1.本发明属于光伏发电技术领域,具体涉及一种基于粒子群的多峰值最大功率追踪的控制方法。
背景技术:
2.在整个光伏发电系统中,光伏电池技术和光伏变换控制技术是两大支撑技术。最大功率点跟踪是高效光伏发电系统的关键技术之一。
3.但在现有的基于粒子群的多峰值最大功率追踪的技术方案中,存在对粒子群追踪速度和精度不佳,变换器控制响应速度不佳,进而导致追踪过程中的功率振荡频率高的问题,因此,研究一种区别于现有技术的基于粒子群的多峰值最大功率追踪的控制方法是研发人员主要攻克的问题之一。
技术实现要素:
4.有鉴于此,本发明的主要目的在于提供一种基于粒子群的多峰值最大功率追踪的控制方法,解决了现有技术中粒子群的追踪速度和精度不佳,变换器控制响应速度不佳,进而导致追踪过程中的功率振荡频率高的问题。
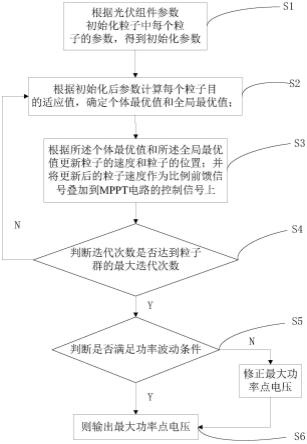
5.为达到上述目的,本发明的技术方案是这样实现的:一种基于粒子群的多峰值最大功率追踪的控制方法,该方法具体包括以下步骤:
6.s1、根据光伏组件参数初始化粒子群中每个粒子的参数,得到初始化参数;
7.s2、根据初始化后参数计算每个粒子目的适应值,确定个体最优值和全局最优值;
8.s3、根据所述个体最优值和所述全局最优值更新粒子的速度和粒子的位置;并将变更后的粒子速度作为比例前馈信号叠加到mppt电路的控制信号上;
9.s4、根据更新后的粒子的速度和粒子的位置判断迭代次数是否达到粒子群的最大迭代次数,若是,则执行s5,若否,则执行s3;
10.s5、判断是否满足功率波动条件,若是,则执行s6,若否,则修正最大功率点电压,则在延时t
delay1
后执行s2;
11.s6、输出最大功率点电压,同时监测输出功率的变化,若输出功率的变化值p
err1
>p
dead1
,且p
err2
>p
dead2
,则在延时t
delay2
后执行s2,反之则维持输出最大功率点电压不变。
12.优选地,所述s2中,所述适应值为光伏陈列的输出功率其中,k为迭代次数,i粒子数。
13.优选地,所述s3中,所述粒子的速度和粒子的位置是以迭代的方式进行更新的,具体公式为:
14.15.式中:表示为i粒子迭代k次中的最优位置,fgbestk表示为粒子群k次迭代中的最优位置,为i粒子第k次迭代的位置;c1为自学因子,c2为社会因子,ωi为惯性权重,r1与r1是在[0,1]区间均匀分布的随机数。
[0016]
优选地,所述s4,粒子群的最大迭代次数:
[0017]kmax
=[(v
max-v
min
)/(0.8*v
oc.stc
)],其中,0.8*v
oc.stc
为粒子初始速度,变换器的工作电压范围为[v
max
,v
min
]。
[0018]
优选地,c1、c2、ωi表示为:
[0019][0020]
式中:c2的取值范围为1~2;为分别为粒子i迭代k中的最大适应值和最小适应值。
[0021]
优选地,所述s5中,判断是否满足功率波动条件的具体方法为:
[0022]
在达到最大迭代次数时,若当前追踪到的最大输出功率与上一次迭代追踪到的最大功率之间的关系满足则认为已经追踪到了最大功率点电压,反之则认为没有追踪到最大功率点,若没有追踪到最大功率点,将实际的最大输出功率点电压设定0.8*fgbest,fgbest为追踪过程中找到的最大功率点对应电压,即全局最优点电压;等待一段时间后重新开始追踪最大功率电压,据此降低当外部条件不断变化对系统输出总功率的影响
[0023]
优选地,所述s6中,所述最大功率点电压表示为:
[0024]vi_mmp
≈0.8*(
voc.stc
+kvδt)*n
str
[0025]
式中,v
oc.stc
为光伏组件的开路电压,kv为开路电压的温度系数,δt为当前环境温度相对标准温度的变化量,n
str
为光伏阵列串联组件的个数。
[0026]
与现有技术相比,通过采用本发明控制方法,不仅提升了粒子群算法的追踪速度和精度,加快了变换器控制响应速度,而且还减小了追踪过程中的功率振荡。
附图说明
[0027]
图1为本发明提供的光伏mppt追踪系统图;
[0028]
图2为本发明实施例提供的一种基于粒子群的多峰值最大功率追踪的控制方法的逻辑框图一;
[0029]
图3为本发明实施例提供的一种基于粒子群的多峰值最大功率追踪过程中mppt电压的变化情况图;
[0030]
图4为本发明实施例提供的一种基于粒子群的多峰值最大功率追踪过程占空比变
化曲线图;
[0031]
图5为本发明实施例提供的一种基于粒子群的多峰值最大功率追踪的控制方法中光伏系统的功率电压变化曲线图;
[0032]
图6为本发明实施例提供的一种基于粒子群的多峰值最大功率追踪的控制方法的逻辑框图二。
具体实施方式
[0033]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0034]
本发明实施例提供的一种基于粒子群的多峰值最大功率追踪的控制方法,如图2所示,该方法具体包括以下步骤:
[0035]
s1、根据光伏组件参数初始化粒子群中每个粒子的参数,得到初始化参数;
[0036]
s2、根据初始化后参数计算每个粒子目的适应值,确定个体最优值和全局最优值;
[0037]
s3、根据所述个体最优值和所述全局最优值更新粒子的速度和粒子的位置;
[0038]
s4、根据更新后的粒子的速度和粒子的位置判断迭代次数是否达到粒子群的最大迭代次数,若是,则执行s5,若否,则执行s3;
[0039]
s5、判断是否满足功率波动条件,若是,则执行s6,若否,则修正最大功率点电压,同时延时t
delay1
后执行s2;
[0040]
其中,延时时间t
delay1
时间是与功率波动条件相关的,功率波动越剧烈,表示外部条件变化频繁,不宜频繁启动粒子群算法,此时t
delay1
较大。功率波动越小,表示外部条件变化轻微,可以重新通过粒子群算法追踪最大功率点电压,以提高系统的平累计发电量。设定t
delay1
基准延时时间为10个工频周期,根据误差值等比例的增大或减小延时时间t
delay1
,同时确定一个最大时间t
delay1_max
,最小时间t
delay1_min
。
[0041]
s6、输出最大功率点电压,同时监测输出功率的变化,若输出功率的变化值p
err1
>p
dead1
,且p
err2
>p
dead2
,则在延时t
delay2
后执行s2,反之则维持输出最大功率点电压不变;此处延时时间t
delay2”,同样为设定t
delay2
基准的延时周期为50个工频周期,当p
err1
增大时,延时时间t
delay2
等比例减小。当p
err1
较小时,延时时间增大。同时确定一个最大时间t
delay2_max
,最小时间t
delay2_min
。
[0042]
其中,p
dead1
表示的是允许的功率波动范围,实际运行的时候功率一定是波动,例如输出100kw,功率在,在1kw内的功率波动是允许的的,那p
dead1
就是1kw,需要注意的是p
err1
是瞬时变化值,p
err1
是相对变化值,因此p
dead1
的设定值会比p
dead2
大;
[0043]
p
err1
表示的是当前输出功率与粒子群算法追踪到的最大功率之间的差值,表示的是与算法追踪到的功率的偏差,p
err2
表示的是当前输出功率与下一个输出功率的差值,表示的是功率的变化趋势;总体的限制条件是,监测到当前输出功率比之前算法追踪到的功率偏差较大,且多个连续周期内,输出功率变化较大。即输出功率呈现了单调递增或递减。此时系统会判断外部条件发生了巨大变化需要重新追踪最大功率点电压。
[0044]
进一步地,所述s2中,所述适应值为光伏陈列的输出功率其中,k为迭代次数,
i粒子数。
[0045]
进一步地,所述s3中,更新粒子的速度和粒子的位置是以迭代的方式进行更新,具体公式为:
[0046][0047]
式中:表示为i粒子迭代k次中的最优位置,fgbestk表示为粒子群k次迭代中的最优位置,为i粒子第k次迭代的位置;c1为自学因子,c2为社会因子,ωi为惯性权重,r1与r1是在[0,1]区间均匀分布的随机数。
[0048]
进一步地,所述s4,粒子群的最大迭代次数k
max
=[(v
max-v
min
)/(0.8*v
oc.stc
)],其中,v
i_mmp
为所有粒子的初始位置,0.8*v
oc.stc
为粒子初始速度,变换器的工作电压范围为[v
max
,v
min
]。
[0049]
进一步地,c1、c2、ωi可表示为:
[0050][0051]
式中:c2的取值范围为1~2;为粒子i迭代k中的最大适应值和最小适应值。
[0052]
进一步地,所述s6中,所述最大功率点电压表示为:
[0053]vi_mmp
≈0.8*(v
oc.stc
+kvδt)*n
str
[0054]
式中,v
oc.stc
为光伏组件的开路电压,kv为开路电压的温度系数,δt为当前环境温度相对标准温度的变化量,n
str
为光伏阵列串联组件的个数。
[0055]
采用上述方案后,通过采用本发明控制方法,不仅提升了粒子群算法的追踪速度和精度,加快了变换器控制响应速度,而且还减小了追踪过程中的功率振荡。
[0056]
在具体的实施过程中,如图1-图6所示,该控制方法主要内容为:1)根据光伏电池的模型估测存在的多峰值电压v
i_mpp
,优化粒子群算法的追踪参数;2)将粒子群算法追踪过程中的速度量作为前馈量叠加到变换器的控制信号上,提高最大功率追踪的精度和速度。
[0057]
根据光伏组件参数表,可以获取到在标准条件下(g
stc
=1kw/m2、t
ref
=25℃)光伏组件的开路电压v
oc.stc
,光伏组件的短路电流i
sc.stc
。设定该光伏阵列串联组件的个数为n
str
,当前环境温度相对标准温度的变化量为δt,kv开路电压的温度系数。根据光伏电池模型可知,最大功率点电压可表示为:
[0058]vi_mmp
≈0.8*(v
oc.stc
+kvδt)*n
str
ꢀꢀꢀ
(1)
[0059]
在本发明中,粒子群算法的粒子的位置,适应度值具体为:1)适应度值为光伏阵列的输出功率算法根据各个粒子的适应度值寻找个体最优位置与全局最优值位置,k为
迭代次数,i粒子数,每个粒子表示一路光伏mppt追踪系统2)粒子的位置为最大功率点电压,粒子的位置与速度以迭代的方式更新,公式为:
[0060][0061]
上式中表示为i粒子迭代k次中的最优位置,即个体最优的最大功率点输出电压。fgbestk表示为粒子群k次迭代中的最优位置,即全局最优的最大功率点电压。为i粒子第k次迭代的位置,即当前功率点的输出电压。为第k-1次迭代时的粒子速度,c1为自学因子,c2为社会因子,ωi为惯性权重,r1与r1是在[0,1]区间均匀分布的随机数。将v
i_mmp
设定为所有粒子的初始位置,将0.8*v
oc.stc
设定为粒子初始速度,设定变换器的工作电压范围为[v
max
,v
min
]。设定粒子群的最大迭代次数k
max
=[(v
max-v
min
)/(0.8*v
oc.stc
)],c1、c2、ωi可表示为:
[0062][0063]
c1为自学因子,c2为社会因子的取值范围为1-2,这里采用线性递减的方式给c1和c2赋值。上式中的分别为粒子i迭代k次的最大适应值和最小适应值,以及第k次时的适应值;可以看出惯性权重随着输出功率的减小而增大,随着迭代次数的增加而减小,从而实现在低功率和初期迭代时大范围搜索最大功率点电压。
[0064]
当粒子群算法迭代到次数达到最大值时,设定粒子群算法的收敛条件为:若满足条件,则认为已寻找到全局最优电压fgbestk,即光伏发电系统的最大功率点,并输出全局最优电压fgbestk。如果在达到最大迭代数n时仍不能满足上述条件,则初步判断光伏阵列的光照条件在短期内存在频繁的波动。则输出已追踪到的最大功率电压值0.8*fgbest作为变换器电压参考值,等待t
delay
后再重新启动粒子群追踪最大功率电压。
[0065]
在找到最大功率点后,将光伏发电系统当前实际输出功率p
out_k
与记录的全局最大功率比较。若两者之间差值的绝对值p
err1
大于第一预设值p
dead1
。进一步将当前的光伏发电系统实际输出功率p
out_k
与上一个周期光伏实际输出功率进行比较,判断两者之间差值绝对值p
err2
是否大于第二预设值p
dead2
,如果满足差值都超过了预设值,则说明外部环境发生变化,等待t
delay
后重启粒子群追踪最大功率点电压。
[0066]
在粒子群算法的追踪过程中,会将个体最优电压作为mppt电路控制器电压环的参考值v
ref
,,通过控制驱动信号占空比将mppt电路的输入电压调节到与参考电压vref
相近。当粒子群开始迭代时,初始的粒子速度较大,粒子的位置的波动范围较大。此时控制器需要花费更长的时间才能追踪到平衡状态。将扰动量作为前馈迭加到控制信号上;可以提高控制器的响应速度和跟踪精度。此时的实际输出的占空比信号其中d
pi
为控制器输出的控制信号,k
p
为粒子速度的比例系数,该系数上一步的功率波动率成正相关。
[0067]
该发明提供的光伏系统多峰值最大功率跟踪方法的粒子群算法是个体最优点向群体最优点fgbestk学习的过程,随着迭代的进行,所有粒子的历史最优点将于与群体历史最优点fgbestk相同。若所有粒子搜索到的最大功率值已经十分接近,说明粒子曾搜索到的局部最优最优点已经被舍去,被全局最优点取代,此时认为已经找到了光伏逆变系统的全局最大功率点。而实现mppt的时候。是通过调整电池板所带负载进行跟踪的,只有当所接负载与电池板内阻相匹配时电池板才能达到最大功率。通过占空比控制dc/dc电路可以调节太阳能电池板所接等效负载,来实现快速追踪最大功率点的效果。
[0068]
通过仿真和实例来显示该算法的全局追踪特性。选取光伏板参数为最大功率225wp,最大功率点电压20v,最大功率点电流7.66a,开路电压25v,短路电流8.20a,开路电压温度系数-0.32%/℃。在环境25℃下,三块光照强度参数分别为800w/m2,600w/m2,240w/m2串联接入dc/dc输入端。在迭代的初始阶段,最大功率点理论电压为v
i_mmp
=0.8*(30+0)*3=60v,粒子群算法的速度量2,光伏逆变器的工作电压范围为[75,30],最大迭代次数25次,c1取2,c2取值1.5,w取0.5,在0.07秒后,两次追踪功率变化量小于1w,系统趋于平稳。在外界扰动较小的情况下,即功率波动小于1w,mppt电压会保持在一个确定值,防止系统频繁的通过粒子群算法进行全局mppt追踪引起总输出功率的衰减。
[0069]
终上所述,本发明控制方法通过获取光伏阵列的光伏组件数,光伏阵列电气参数,初始阶段将粒子分布在可能的最大功率点上,通过迭代不断更新追踪参数实现全局最大功率点追踪;同时将粒子群的速度量作为前馈值叠加到变换器的占空比信号上,提升了粒子群算法的追踪速度和精度,加快了变换器控制响应速度,减小了追踪过程中的功率振荡。
[0070]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1