一种基于无人机的飞行路径规划方法与流程
1.本发明属于路径规划技术领域,具体涉及一种基于无人机的飞行路径规划方法。
背景技术:
2.现有的如无人机等需要进行路径规划的移动机器人采用的路径规划方法多为基于凸多边形地块的往复式运行航线规划方法,其根据凸多边形边界点计算出外框经纬度范围,在范围内根据航线间的间隔和方向,计算出一组平行线与多边形外框的交点,转为经纬度坐标,然后按顺序添加到航线里,生成往复式航线。
3.上述路径规划方法的缺点为:1、路径规划的路线较长,导致飞行时间过长,不适合电量小的无人机;2、该方法主要用于面积较大的凸多边形区域内采集数据,对多边形形状有要求,如凹多边形不适合;3、该方法实现过程中需要确定区域边界点。
技术实现要素:
4.针对现有技术中的上述不足,本发明提供的基于无人机的飞行路径规划方法解决了上述背景技术中的问题。
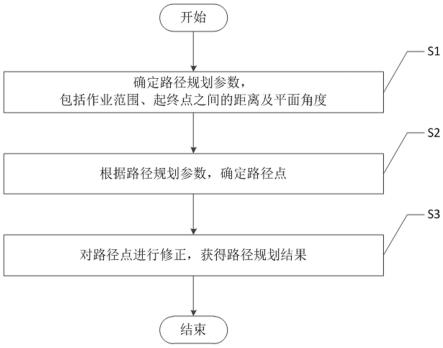
5.为了达到上述发明目的,本发明采用的技术方案为:一种基于无人机的飞行路径规划方法,包括以下步骤:s1、确定路径规划参数,包括作业范围、起终点之间的距离及平面角度;s2、根据路径规划参数,确定路径点;其中,路径点为起终点之间的若干圆形路径上的移动点以及圆形路径上的起始点;s3、对路径点进行修正,获得路径规划结果。
6.进一步地,所述步骤s2具体为:s21、确定圆形路径的圈数;s22、计算每个圆形路径的圆心位置;s23、根据圆心位置确定每个圆形路径上的起始点;s24、计算每个圆形路径上的移动点。
7.进一步地,所述步骤s21中圆形路径的圈数q为:式中,d为起终点之间距离,r为作业范围的半径,
ϕ
为作业范围的直径,为向上取整符号。
8.进一步地,所述步骤s22中,根据起点a和终点b的经度一致性,在utm平面坐标系中确定每个圆形路径的圆心位置,其中,第一个圆形路径的圆心位置为起点坐标;当起点a和终点b的经度一致时,若起点a在下终点b在上,则圆心位置o为:
;若起点a在上终点b在下,则圆心位置o为:;当起点a和终点b的经度不一致,且纬度一致时,若起点a在左终点b在右,则圆心位置o为:;若起点a在右终点b在左,则圆心位置o为:;当起点a和终点b的经度不一致,且纬度也不一致时,则圆心位置o为: ;其中,r为作业范围的半径,a为起终点间的平面角度,为起点a在utm坐标系中的平面坐标,i为圆形路径的序号,且i=0,1,2,3,
…
,q-1,q为圆形路径的圈数,i=0对应第一个圆形路径。
9.进一步地,所述步骤s23中,根据起点a和终点b的经度一致性,在utm平面坐标系中确定每个圆形路径的起始点;当起点a和终点b的经度一致时,若起点a在下终点b在上,则起始点位置为:;若起点a在上终点b在下,则起始点位置t为:;当起点a和终点b的经度不一致,且纬度一致时,若起点a在左终点b在右,则起始点位置为:;若起点a在右终点b在左,则起始点位置t为:;当起点a和终点b的经度不一致,且纬度也不一致时,则起始点位置t为:;其中,为圆形路径的圆心位置坐标,r为半径,a为起终点间的平面角度。
10.进一步地,所述步骤s24具体为:s24-1、基于圆形路径的等分数,确定圆形路径上移动点的数量;s24-2、根据起始点角度,从起始点开始按顺时针方向,依次确定每个移动点的移动角度,进而确定每个移动点的位置;其中,起始点角度为:,a为utm坐标系中起点a和终点b间的平面角度,每个移动点对应的移动角度为:,为圆形路径n等分的角度,j为移动点的序号。
11.进一步地,所述步骤s3中,对路径点的修正包括高度差影响修正和重叠修正。
12.进一步地,所述高度差影响修正是指对路径点的高度进行修正,修正的方法具体为:计算每个圆形路径的圆心与起点的相对高度差,进而确定每个圆形路径的海拔高度,得到每个路径点修正后的高度h为:式中,为起点a的高度,为两个圆形路径圆心之间高度偏差,i为圆形路径的序号,且i=0,1,2,3,
…
,q-1,为圆形路径的圈数。
13.进一步地,所述重叠修正是指对连续圆形路径之间的重叠距离进行修正,修正方法具体为:基于圆形路径间的目标重叠率,对移动机器人的飞行速度进行调整,进而修正圆
形路径之间的重叠距离;其中,重叠距离d为:,为重叠率,d’为拍摄真实距离,且。
14.本发明的有益效果为:(1)本发明方法应用到无人机上时,可以缩短飞行时间,同样电量下,无人机可以做更多航拍飞行,提升采集数据的效率。
15.(2)航线规划不再需要依赖凸多边形区域规划,只需要两个点即可一键生成。
16.(3)参数配置自由,适配各种需要,圆形半径、航点速度、高度、重叠率等都可以自己配置。
17.(4)圆形路径的等分数人为设置,随时可以精确定位到飞机当前哪个点,如果一次航线飞不完,可以暂停任务,下次飞行直接从对应记录的点出发继续执行。
18.(5)可以根据实际情况调整并延生对应算法,在两点间路径规划的基础上,如果有需要,可以延生出3个点,4个点,甚至多点间的路径规划。
附图说明
19.图1为本发明提供的基于无人机的飞行路径规划方法流程图。
20.图2为本发明中的起终点坐标示意图。
21.图3为本发明中的起终点间的平面角度示意图。
22.图4为本发明中的确定圆形路径圈数示意图。
23.图5为本发明中的起终点经度一致且起点在下终点在上时的圆心确定示意图。
24.图6为本发明中的起终点经度不一致且纬度一致时的圆心确定示意图。
25.图7为本发明中的起终点经纬度均不一致时的圆心确定示意图。
26.图8为本发明中的起终点经纬度均不一致时的起始点确定示意图。
27.图9为本发明中的确定移动点位置坐标示意图。
28.图10为本发明中的路径规划轨迹图。
29.图11为本发明中的高度差修正示意图。
具体实施方式
30.下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
31.本发明实施例提供了一种基于无人机的飞行路径规划方法,如图1所示,包括以下步骤:s1、确定路径规划参数,包括作业范围、起终点之间的距离及平面角度;s2、根据路径规划参数,确定路径点;其中,路径点为起终点之间的若干圆形路径上的移动点以及圆形路径上的起始点;
s3、对路径点进行修正,获得路径规划结果。
32.本发明实施例的步骤s1中,如图2所示,路径规划时的起点和终点分别为a、b,作业范围,即圆形路径的半径为r,移动机器人基于gps坐标系确定的起点a的坐标为a(lnga,lata,ha),终点b的坐标为b(lngb,latb,hb)。
33.在本实施例中,对于a、b之间的距离,可采用以下三种方法计算:(1)使用location.distancebetween函数求解;(2)将gps坐标系转换到utm(universal transverse mercator grid system,通用横墨卡托格网系统)平面坐标系,在utm平面坐标系中计算两点之间的距离;(3)使用haversine公式计算。
34.本实施例中,以第二种方法为例,给出距离的计算方法:将a、b所在的gps坐标系转换到utm坐标系中,然后在utm坐标系中根据勾股定理即可计算出距离。
35.本实施例中的utm坐标系作为一种平面坐标系是一种平面直角坐标,这种坐标格网系统及其所依据的投影已经广泛用于地形图,作为卫星影像和自然资源数据库的参考格网以及要求精确定位的其他应用;在该坐标系中,两点距离即为实际距离。
36.在本实施例中,对于起终点之间的平面角度,其计算方法为:根据起终点在gps坐标系中的经纬度,确定其在utm坐标下的分带,根据不同分带对应的计算算法,确定起终点在utm坐标系中的平面坐标,得到起点a的平面坐标为,终点b的平面坐标为,如图3所示,得到平面角度a满足:,进而根据反三角函数计算出平面角度。
37.本发明实施例的步骤s2具体为:s21、确定圆形路径的圈数;s22、计算每个圆形路径的圆心位置;s23、根据圆心位置确定每个圆形路径上的起始点;s24、计算每个圆形路径上的移动点。
38.本实施例的步骤s21中,如图4所示,圆形路径的圈数q为:式中,d为起终点之间距离,r为作业范围的半径,
ϕ
为作业范围的直径,为向上取整符号。
39.本实施例的步骤s22中,根据起点a和终点b的经度一致性,在utm平面坐标系中确定每个圆形路径的圆心位置,其中,第一个圆形路径的圆心位置为起点坐标;当起点a和终点b的经度一致时,如图5所示,若起点a在下终点b在上,则圆心位置o为:;若起点a在上终点b在下,则圆心位置o为:;当起点a和终点b的经度不一致,且纬度一致时,如图6所示,若起点a在左终点b在右,则圆心位置o为:;若起点a在右终点b在左,则圆心位置o为:;
当起点a和终点b的经度不一致,且纬度也不一致时,如图7所示,则圆心位置o为: ;其中,r为作业范围的半径,a为起终点间的平面角度,为起点a在utm坐标系中的平面坐标,i为圆形路径的序号,且i=0,1,2,3,
…
,q-1,q为圆形路径的圈数,i=0对应第一个圆形路径,即点a即是起点也是第一个圆形路径的圆心位置。
40.本实施例的步骤s23中,根据起点a和终点b的经度一致性,在utm平面坐标系中确定每个圆形路径的起始点;当起点a和终点b的经度一致时,若起点a在下终点b在上,则起始点位置为:;若起点a在上终点b在下,则起始点位置t为:;当起点a和终点b的经度不一致,且纬度一致时,若起点a在左终点b在右,则起始点位置为:;若起点a在右终点b在左,则起始点位置t为:;当起点a和终点b的经度不一致,且纬度也不一致时,如图8所示,则起始点位置t为:;其中,为圆形路径的圆心位置坐标,r为半径,a为起终点间的平面角度。
41.本实施例的步骤s24具体为:s24-1、基于圆形路径的等分数,确定圆形路径上移动点的数量;s24-2、根据起始点角度,从起始点开始按顺时针方向,依次确定每个移动点的移动角度,进而确定每个移动点的位置;其中,起始点角度为:,a为utm坐标系中起点a和终点b间的平面角度,每个移动点对应的移动角度为:,为圆形路径n等分的角度,j为移动点的序号。
42.具体地,如图9所示,基于计算出的移动角度根据三角函数计算出每个移动点的平面坐标。
43.本实施例中,默认将圆形路径等分为18份,也可根据需要设置成其他数字,数字越大确定移动点数越多,以18为例,一个圆形路径被分为18份,除了18个移动点外,终点和起点的位置一致,即一个圆形路径上的移动点数为19,如果有q个圆形路径,则就是19*q个移动点,当无人机需要断点续飞时,可以直接从第几个点开始任务。
44.基于上述过程得到的路径点如图10所示,其中起点为a,终点为b,实际飞行轨迹为从起点出发,飞到第一个圆的起飞点,然后顺时针飞向下一个航点;一圈飞完后刚好在起飞点,然后直线飞向下一个圆的起飞点,继续顺时针飞行。
45.本实施例的步骤s3中,对路径点的修正包括高度差影响修正和重叠修正。
46.其中,高度差影响修正是指对路径点的高度进行修正,修正的方法具体为:如图11所示,计算每个圆形路径的圆心与起点的相对高度差,进而确定每个圆形路径的海拔高度,得到每个路径点修正后的高度h为:
式中,为起点a的高度,为两个圆形路径圆心之间高度偏差,i为圆形路径的序号,且i=0,1,2,3,
…
,q-1,为圆形路径的圈数;其中,确定每个圆形路径的海拔高度以便本方法适用于起点和终点高度差较大的情况。
47.其中,重叠修正是指对连续圆形路径之间的重叠距离进行修正,修正方法具体为:基于圆形路径间的目标重叠率,对移动机器人的飞行速度进行调整,进而修正圆形路径之间的重叠距离;其中,重叠距离d为:,为重叠率,d’为拍摄真实距离,且。
48.具体地,当移动机器人的拍照时间固定时,基于想要实现的重叠距离,可以计算出移动机器人的移动速度,即基于实际移动距离等于拍摄真实距离与重叠距离的差值,进而对移动机器人其进行移动控制。
49.需要说明的是,本发明实施例提供了的路径规划方法,除了可以应用到无人机等飞行器上,也可以用于陆地运行的移动机器人,以最终解决基于路径规划结果实现可见光下的高精度三维重建。
50.在本发明的描述中,需要理解的是,术语“中心”、“厚度”、“上”、“下”、“水平”、“顶”、“底”、“内”、“外”、“径向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1