一种用于商业卫星的编队捕获方法与流程
1.本发明涉及卫星编队技术领域,具体涉及一种用于商业卫星的编队捕获方法。
背景技术:
2.随着商业卫星的快速发展,卫星编队也逐渐提上日程,由于卫星编队可以在若干颗卫星之间形成稳定精确的基线,因此在光学立体成像、合成孔径雷达成像、目标精确定位等方面具有较高的应用价值。但是对于商业卫星,一方面为了节省运载发射成本,一般采用多星入轨的方式,因此需要依靠自身的控制能力实现编队捕获;另一方面商业卫星从制造成本的角度出发,燃料携带有限,轨道控制能力较弱。
3.卫星编队的概念自提出来起,编队捕获就是一个首要解决的问题。
4.在编队捕获问题的解决上,国内外很多学者都是在相对运动动力学方程的基础上,将编队捕获问题转化为最优控制问题,即已知状态方程和初始值,通过设计经典或者先进控制律,使设定的性能指标最优,实现状态参数的转移,而性能指标往往是燃料最优(特殊情况下需要时间最优)。以半径为10km圆编队为例,上述方法需要的速度增量达到几百~几千米每秒,显然对于商业卫星而言是无法承载这么巨大的燃料需求的。另外也有一种方法是将编队参数转化为卫星的轨道六根数参数,通过经典n冲量控制方法,调整编队卫星的轨道根数,实现编队捕获,这种方式具有较高的工程应用价值,根据相关研究表明,采用该方法半径为10km的圆编队速度增量需求约为10m/s。
5.事实上,以上方法均是在经典运动方程的框架下,忽略了卫星的空间摄动力,实现编队的直接捕获。
6.因此在卫星编队领域,亟需一种利用卫星本身的受摄运动机制,且只消耗较低的燃料就可实现编队捕获的方法。
技术实现要素:
7.为了解决上述问题,本发明提供一种用于商业卫星的编队捕获方法。
8.本发明为解决技术问题所采用的技术方案如下:
9.一种用于商业卫星的编队捕获方法,包括:
10.根据编队卫星的轨道倾角i的大小选择通过改变i或是改变a实现ws的改变,当i∈[(90-β)
°
,(90+γ)
°
]时,通过改变i实现ws的改变,否则,通过改变a实现ws的改变,β和γ均为正数,a表示编队卫星轨道半长轴,ws表示编队卫星轨道面和基准卫星轨道面间的基线长度;
[0011]
当选择通过改变i实现ws的改变时,计算编队卫星的倾角改变量根据计算速度增量大小;当选择通过改变a实现ws的改变时,计算编队卫星轨道半长轴改变量根据计算速度增量大小。
[0012]
本发明的有益效果是:
[0013]
本发明的一种用于商业卫星的编队捕获方法提出了一种根据卫星轨道面间的受
摄运动原理,通过改变倾角或者半长轴从而改变卫星轨道面在惯性空间中的进动速度,使得编队卫星在升交点赤经上形成稳定的差异,进而实现卫星编队捕获。该方法可以大幅降低编队捕获的燃料需求,因此适用于有燃料成本限制的商业卫星;该方法捕获过程采用冲量控制方式,易于工程化实现;该方法控制批次少,仅需在漂移时间段的前后沿实施即可。
附图说明
[0014]
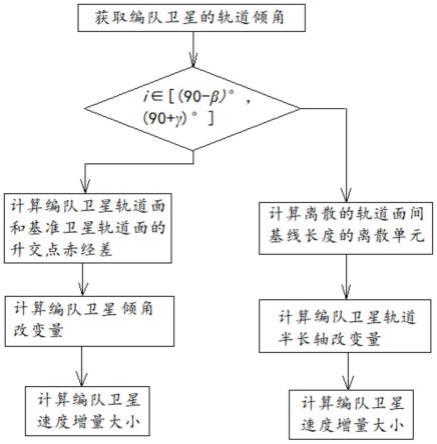
图1为本发明的一种用于商业卫星的编队捕获方法的流程图。
[0015]
图2为本发明的一种用于商业卫星的编队捕获方法的部分参数示意图。
具体实施方式
[0016]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。
[0017]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
[0018]
实施例一
[0019]
本实施例提供一种用于商业卫星的编队捕获方法,用以解决在现有编队捕获问题的解决上均忽略了卫星的空间摄动力且消耗燃料较高的问题。
[0020]
首先,根据现有的编队运动学理论可以知道,卫星形成编队一方面是要在偏心率上做微调,这样编队卫星可以绕着基准卫星在轨道面内实现椭圆运动,另一方面要在升交点赤经或者轨道倾角上与基准卫星形成差异,从而在编队卫星轨道面外形成单摆运动。对于偏心率的调整,根据高斯摄动方程,只需施加较小的冲量就可以实现较大的空间基线;但对于升交点赤经及轨道倾角的调整,需要施加较大的冲量才能获得同等空间基线,而且一般应用中调整升交点赤经居多,很少调整轨道倾角,因为若调整轨道倾角,编队卫星在低纬度区域的空间基线最小,不适合低纬度的观测。本实施例以及下述其他实施例中均创造性的利用卫星轨道升交点赤经的受摄运动,实现了消耗较少的燃料实现编队捕获。
[0021]
本实施例的一种用于商业卫星的编队捕获方法,包括如下步骤:
[0022]
根据编队卫星的轨道倾角i的大小选择通过改变i或是改变a实现ws的改变,当i∈[(90-β)
°
,(90+γ)
°
]时,通过改变i实现ws的改变,否则,通过改变a实现ws的改变,β和γ均为正数,a表示编队卫星的轨道半长轴,ws表示编队卫星轨道面和基准卫星轨道面间的基线长度;
[0023]
当选择通过改变i实现ws的改变时,计算编队卫星的倾角改变量根据计算速度增量大小;当选择通过改变a实现ws的改变时,计算编队卫星轨道半长轴改变量根据计算速度增量大小。
[0024]
实施例二
[0025]
本实施例提供一种用于商业卫星的编队捕获方法,如图1,包括:
[0026]
根据编队卫星的轨道倾角i的大小选择通过改变i或是改变a实现ws的改变,当i∈[(90-β)
°
,(90+γ)
°
]时,通过改变i实现ws的改变,否则,通过改变a实现ws的改变,β和γ均为正数,a表示编队卫星的轨道半长轴,ws表示编队卫星轨道面和基准卫星轨道面间的基线长
度;
[0027]
当选择通过改变编队卫星的轨道倾角i实现ws的改变时,根据编队要求的ws、利用公式(1)计算编队卫星轨道面和基准卫星轨道面的升交点赤经差δω,
[0028][0029]
根据δω,利用公式(15)计算编队卫星的倾角改变量
[0030][0031]
根据公式(4.2)计算编队卫星的速度增量大小,
[0032][0033]
其中,μ为地球常数,j2为地球扁率摄动二阶系数,re为地球平均半径,e为偏心率,n为编队卫星轨道角速度,u为纬度辐角,δva为编队卫星轨道迹向速度增量。
[0034]
通过改变编队卫星的轨道半长轴a实现ws的改变能够实现离散的ws,当选择通过改变a实现ws的改变时,根据公式(13)或公式(14)计算离散的ws的离散单元d,
[0035][0036][0037]
根据公式(9)、d和编队要求的ws计算编队卫星轨道半长轴改变量
[0038][0039]
其中,n表示编队卫星绕地球做圆周运动的整圈圈数,n为正整数,所述n的值通过d和编队要求的ws确定,所述n等于编队要求的ws除以d的值进行向上取整;t表示通过改变a实现ws的改变的时间,即时间成本。
[0040]
根据利用公式(4.1)计算速度增量δva[0041][0042]
其中,δva为编队卫星轨道迹向速度增量。
[0043]
在实现ws改变所需时间t的前和后(开始时刻和结束时刻),各提供一次速度增量,也就是根据速度增量提供冲量(即脉冲),实现编队卫星升交点赤经的改变,也就是实现ws的改变。
[0044]
实施例三
[0045]
一种用于商业卫星的编队捕获方法,包括如下步骤:
[0046]
步骤一、将轨道面间基线长度转化为升交点赤经差。
[0047]
根据现有的编队运动学理论可知,要在偏心率上做微调,编队卫星可以绕着基准卫星在编队卫星轨道面内实现椭圆运动。如图2所示,图2示意的是未编队时,基准卫星的轨道倾角等于编队卫星的轨道倾角i,轨道倾角简称倾角,基准卫星的轨道半长轴等于编队卫星的轨道半长轴a,编队卫星轨道面和基准卫星轨道面间的基线长度为ws。根据球面直角三
角形的余弦公式可得编队卫星轨道面和基准卫星轨道面的升交点赤经差δω:
[0048][0049]
步骤二,根据编队卫星的轨道倾角的大小选择控制参数
[0050]
根据航天器轨道理论中地球扁率对卫星轨道升交点赤经的影响,根据步骤一得到的升交点赤经差,得到卫星轨道升交点赤经的进动角速度为:
[0051][0052]
上式中,f(a,i)表示变量为a和i的函数,re为地球平均半径,μ为地球常数,且μ=398600.4418km3/s,j2为地球扁率摄动二阶系数,i为编队的轨道倾角,e为偏心率,对(2)式求偏导可得:
[0053][0054]
根据高斯型受摄运动方程可知,在编队卫星星下点轨迹为圆轨道(偏心率e≈0)的情况下,a和i满足如下公式:
[0055][0056][0057]
其中,n为编队卫星轨道角速度,u为纬度辐角,δva为编队卫星轨道迹向速度增量,δva可以改变编队卫星轨道半长轴a,δvi为编队卫星轨道法向速度增量,δvi用于改变编队卫星的倾角i,从(4.1)式和(4.2)式中也可以看出,改变倾角i需要在纬度辐角为0
°
或180
°
的位置实施,即编队卫星的升降交点位置。
[0058]
根据(3)式,当公式(3)满足公式(5)的条件时,改变编队卫星轨道半长轴a或改变编队卫星轨道倾角i得到相同的
[0059][0060]
将(4.1)式和(4.2)式代入(5)式可得:
[0061][0062]
公式(6)表明,当编队卫星倾角i∈[81.87
°
,98.13
°
]时,改变编队卫星倾角i的速度增量最小,则选择通过改变倾角实现ws的改变,当编队卫星倾角i不在这个区间时,改变编队卫星轨道半长轴a的速度增量最小,则选择通过改变a实现ws的改变。
[0063]
因此,可根据编队卫星轨道倾角大小选择控制参数,控制参数包括轨道半长轴和轨道倾角,即根据编队卫星轨道倾角大小选择改变a或是改变i。
[0064]
对于改变半长轴的情况,进行如下详述:
[0065]
由于改变半长轴会导致编队卫星与基准卫星在飞行方向上逐渐拉开相位,显然,背离了卫星编队的基本条件(编队卫星与基准卫星的半长轴要保持一致),因此,必须想办法让编队卫星重新回到基准卫星附近,考虑卫星绕地球做圆周运动,因此,可通过扣圈来保
障编队卫星回到基准卫星附近,扣圈的含义为卫星绕地球做圆周运动至少达到了一次完整的圆周运动,扣圈n次表示卫星绕地球做n次圆周运动,即n圈,n为正整数,n表示编队卫星绕地球做圆周运动的整圈圈数。
[0066]
编队卫星的轨道角速度公式为:
[0067][0068]
当编队卫星轨道半长轴上施加了编队卫星轨道半长轴改变量的变化量后,编队卫星完成n次扣圈(n次扣圈即绕地球圆周运动n圈)的时间t需满足:
[0069][0070]
t表示实现改变ws的时间,在此具体指通过改变a实现ws的改变的时间。
[0071]
对(8)式线性化处理可得:
[0072][0073]
其中,
[0074]
当编队卫星n次扣圈完成后,需要恢复半长轴,这样编队卫星的升交点赤经进动角速度也与基准卫星的升交点赤经进动角速度一致,形成稳定的升交点赤经差δω。
[0075][0076]
考虑编队卫星星下点轨迹为圆轨道的情况,并对(10)式线性化处理可得:
[0077][0078]
将(9)式代入(11)式:
[0079][0080]
由于n为整数,因此(12)式表明,采用改变编队卫星轨道半长轴的方式实现编队捕获只能实现改变到离散的轨道面间基线长度ws,且离散单元d为:
[0081][0082]
考虑一般编队轨道面间基线长度ws远小于轨道半长轴a,上式可化简为:
[0083][0084]
同时,(9)式给出了轨道面间调整的时间成本和燃料成本。
[0085]
对于改变倾角的情况,进行如下详述::
[0086]
不同于改变半长轴a,改变倾角i的情况比较简单,不会造成卫星在飞行方向上漂移。改变倾角i只需施加两次冲量即可,利用编队卫星的倾角改变量使得编队卫星与基准卫星形成升交点赤经差δω。
[0087][0088]
t表示实现改变ws的时间,在此具体指通过改变i实现ws的改变的时间。
[0089]
步骤三,利用两次脉冲控制实现编队卫星升交点赤经的改变
[0090]
根据步骤二,可以解得半长轴或倾角的控制量以及时间成本t,只需根据(4.1)式和(4.2)式,在t时间段的开始时刻和结束时刻各施加一次速度增量即可完成编队卫星升交点赤经的改变,根据速度增量实现编队卫星升交点赤经的改变,也就是实现ws的改变。
[0091]
步骤四,调整其它编队参数实现编队捕获
[0092]
最后,再对编队卫星的卫星轨道面内参数(主要是偏心率)进行调整即可完成编队捕获。根据(4.1)式和(4.2)式可知,轨道面内参数调整的燃料消耗相对较小,例如,1m/s的速度增量即可获得2km的面内基线长度。
[0093]
利用本发明的一种用于商业卫星的编队捕获方法进行了两个应用案例的计算与仿真,具体过程及实施结果如下:
[0094]
应用案例一:90天内完成535km高度的太阳同步卫星的编队捕获,编队构型为圆编队,编队半径为10km;
[0095]
首先,根据步骤一,求解升交点赤经差,根据圆编队理论可知,编队要求的轨道面间基线长度ws为根据公式(1)换算出δω=1.26
×
10-3
rad。
[0096]
根据步骤二所述,由于535km高度的太阳同步轨道标称倾角为97.54
°
,改变倾角的速度增量较小,因此,选择通过改变倾角实现轨道面间基线;
[0097]
通过公式(15)计算90天内形成该升交点赤经差需要的倾角差
[0098]
根据步骤三所述,利用公式(4.2)求解90天时间段前后的两次的速度增量大小为0.82m/s。
[0099]
根据步骤四所述,调整轨道面内参数,根据圆编队理论(即基于c-w方程得到的圆编队相对运动方程)轨道面内椭圆长轴为10km,因此,调整偏心率的两次速度增量为2.5m/s。
[0100]
通过上述分析,总的速度增量需求为6.64m/s。
[0101]
应用案例二:90天完成500km高度35
°
低倾角的卫星编队捕获,捕获构型为pendulum摆式编队,基线长度在50km附近;
[0102]
根据步骤一、二、三所述,该倾角下的编队捕获适宜采用改变半长轴的方式实现,但是,改变半长轴的方式只适合离散的轨道面基线长度。且离散单元根据(14)式可以计算出d为66km,因此轨道面间的基线长度只能取66km的整数倍。同时根据(9)式可知,其时间成本为由于编队要求的基线长度约为50km,因此选择扣圈次数为n=1,则半长轴控制量
[0103]
根据步骤三所述,利用公式(4.1)求解出90天时间段前后两次的速度增量大小为1.85m/s。
[0104]
由于pendulum摆式编队无须调整偏心率参数,因此,步骤四可不用计算。
[0105]
通过上述分析,总的速度增量需求为3.7m/s。
[0106]
通过上述两个案例分析可以发现,采用该方法进行编队捕获,速度增量的需求远远低于现有方法,适用于商业卫星。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1