一种基于故障树的遥感卫星接收天线故障诊断方法
1.本发明涉及遥感卫星地面接收系统运行管理技术领域,特别是涉及一种基于故障树的遥感卫星接收天线故障诊断方法。
背景技术:
2.随着在轨遥感卫星数量迅速增加,地面接收天线数量及单天线每日任务执行量激增,这就对地面系统可靠性及稳定性提出了更高要求。对于大口径天线而言,设计寿命一般超过15年,业务量的激增意味着机械、电气性能的降低和使用时间的缩短,当某个部件出现问题,当前主要依靠停机人工检修,就需要较长的时间来进行恢复,这种情况在备品备件不足情况下更为严重。在问题出现早期,及时发现定位故障,成为系统建设、维保的重要方面。
3.故障树分析法在系统可靠性分析中发展中应用较为广泛,但常规的故障树分析不考虑设备或部件故障的关联性,在动态系统故障分析的有效性受限,无法满足复杂系统故障诊断可靠性的需求。同时,已有的遥感卫星接收天线故障诊断方面相关研究较为弱化,在遥感卫星地面接收系统建设中未见工程化应用的实例。结合遥感卫星接收系统目前无人值守自动化运行的趋势,提出了基于故障树的天线故障诊断方法并加以实现。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种基于故障树的遥感卫星接收天线故障诊断方法,通过实时采集到的各项数据对遥感卫星接收天线系统进行综合故障诊断,并针对故障进行定位并给出诊断建议,可以满足大口径遥感卫星地面接收天线系统的故障诊断。
5.为实现上述目的及其他相关目的,本发明提供一种基于故障树的遥感卫星接收天线故障诊断方法,包括:
6.s1、建立根节点遥感卫星接收天线系统故障树,所述根节点遥感卫星接收天线系统故障树的根节点包括时码编码单元故障、天线控制单元故障、天线驱动单元故障以及极化控制单元故障;
7.s2、建立父节点时码编码单元故障树,所述父节点时码编码单元故障树包括编码跳码故障和时码跳码故障;
8.s3、建立父节点天线控制单元故障树,所述父节点天线控制单元故障树包括天线失控故障、天线震荡故障以及链路故障;
9.s4、建立父节点天线驱动单元故障树,所述父节点天线驱动单元故障树包括多个支路故障;
10.s5、建立父节点极化控制单元故障树,所述父节点极化控制单元故障树包括多个极化控制器控制超时故障。
11.在本发明的一实施例中,所述步骤s1中的建立根节点遥感卫星接收天线系统故障树包括:
12.s11、分析遥感卫星接收天线系统故障发生的原因,并根据事件逻辑,得到中间事件的最小割集{mb1}、{mb2}、{mb3}、{mb4};
13.s12、所述最小割集{mb1}、{mb2}、{mb3}、{mb4}分别对应时码编码单元故障、天线控制单元故障、天线驱动单元故障、极化控制单元故障;
14.s13、以逻辑或门连接所述最小割集{mb1}、{mb2}、{mb3}、{mb4},以建立根节点遥感卫星接收天线系统故障树,所述根节点遥感卫星接收天线系统故障树的根节点ma=mb1∪mb2∪mb3∪mb4。
15.在本发明的一实施例中,所述步骤s2中的建立父节点时码编码单元故障树包括:
16.s20、根据检测到的跳码定位故障原因,得到最小割集为编码跳码故障{mc1}和时码跳码故障{mc2},以逻辑或门连接编码跳码故障{mc1}和时码跳码故障{mc2},时码编码单元故障mb1=mc1∪mc2;
17.s21、对编码跳码故障{mc1}原因进行分析,得到最小割集为方位轴角度跳码、俯仰轴角度跳码、第三轴角度跳码,所述最小割集为方位轴角度跳码、俯仰轴角度跳码、第三轴角度跳码分别对应故障树叶子节点{md1}、{md2}、{md3},以逻辑或门连接故障树叶子节点{md1}、{md2}、{md3},编码跳码故障mc1=md1∪md2∪md3;
18.s22、对时码跳码故障{mc2}原因进行分析,得到最小割集为时间跳秒,所述时间跳秒作为故障树叶子节点。
19.在本发明的一实施例中,所述步骤s3中的建立父节点天线控制单元故障树包括:
20.s30、分析天线控制单元故障原因,得到最小割集为天线失控故障{mc3}、天线震荡故障{mc4}、天线链路故障{mc5},以逻辑或门连接天线失控故障{mc3}、天线震荡故障{mc4}、天线链路故障{mc5},天线控制单元故障mb2=mc3∪mc4∪mc5;
21.s31、对天线转速进行分析,得到最小割集为方位轴失控故障、俯仰轴失控故障、第三轴失控故障,所述最小割集为方位轴失控故障、俯仰轴失控故障、第三轴失控故障分别对应故障树叶子节点{md4}、{md5}、{md6},以逻辑或门连接故障树叶子节点{md4}、{md5}、{md6},天线失控故障mc3=md4∪md5∪md6;
22.s32、对天线方位轴、俯仰轴、第三轴的电流变化幅度进行分析,得到最小割集为方位轴震荡故障、俯仰轴震荡故障、第三轴震荡故障,所述最小割集为方位轴震荡故障、俯仰轴震荡故障、第三轴震荡故障分别对应故障树叶子节点{md7}、{md8}、{md9},以逻辑或门连接故障树叶子节点{md7}、{md8}、{md9},天线震荡故障mc4=md7∪md8∪md9;
23.s33、监测天线控制单元常规监测信息,得到最小割集为时码编码单元链路故障、天线驱动单元链路故障、极化控制单元链路故障、跟踪接收机链路故障、天线控制单元链路故障,所述最小割集为时码编码单元链路故障、天线驱动单元链路故障、极化控制单元链路故障、跟踪接收机链路故障、天线控制单元链路故障分别对应故障树叶子节点{md10}、{md11}、{md12}、{md13}、{md14},以逻辑或门连接故障树叶子节点{md10}、{md11}、{md12}、{md13}、{md14},天线链路故障mc5=md10∪md11∪md12∪md13∪md14。
24.在本发明的一实施例中,所述步骤s4中的建立父节点天线驱动单元故障树包括:
25.s40、分析天线驱动单元故障原因,得到最小割集为方位轴支路故障{mc6}、俯仰轴支路故障{mc7}、第三轴支路故障{mc8},以逻辑或门连接方位轴支路故障{mc6}、俯仰轴支路故障{mc7}、第三轴支路故障{mc8},天线驱动单元故障mb3=mc6∪mc7∪mc8;
26.s41、分析方位轴支路故障,得到最小割集为控保开关故障{md15}、方位轴支路机电故障{md16}、插拔锁故障{md17},以逻辑或门连接控保开关故障{md15}、方位轴支路机电故障{md16}、插拔锁故障{md17},方位轴支路故障mc6=md15∪md16∪md17;
27.s42、分析俯仰轴支路故障,得到最小割集为控保开关故障{md18}、俯仰轴支路机电故障{md19}、插拔锁故障{md20},以逻辑或门连接控保开关故障{md18}、俯仰轴支路机电故障{md19}、插拔锁故障{md20},俯仰轴支路故障mc7=md18∪md19∪md20;
28.s43、分析第三轴支路故障,得到最小割集为控保开关故障{md21}、第三轴支路机电故障{md22}、插拔锁故障{md23},以逻辑或门连接控保开关故障{md21}、第三轴支路机电故障{md22}、插拔锁故障{md23},第三轴支路故障mc8=md21∪md22∪md23。
29.在本发明的一实施例中,所述步骤s5中的建立父节点极化控制单元故障树包括:
30.分析极化控制单元故障原因,得到最小割集为1号极化控制器控制超时故障{mc9}、2号极化控制器控制超时故障{mc10}、3号极化控制器控制超时故障{mc11}、4号极化控制器控制超时故障{mc12}、5号极化控制器控制超时故障{mc13}、6号极化控制器控制超时故障{mc14},以逻辑或门连接1号极化控制器控制超时故障{mc9}、2号极化控制器控制超时故障{mc10}、3号极化控制器控制超时故障{mc11}、4号极化控制器控制超时故障{mc12}、5号极化控制器控制超时故障{mc13}、6号极化控制器控制超时故障{mc14},极化控制单元故障mb4=mc9∪mc10∪mc11∪mc12∪mc13∪mc14。
31.在本发明的一实施例中,所述步骤s21包括:
32.s211、设定天线三轴即为方位轴、俯仰轴、第三轴的最大速度参数;
33.s212、实时监测天线控制单元中的天线角度信息和角度跳码状态信息;
34.s213、分别计算方位轴、俯仰轴、第三轴的角编码器的当前天线角度测量值与前一次天线角度测量值之间的差值,若角度差值与采样时间的比值大于设定的最大速度参数,则判定编码跳码故障,或当天线控制单元上报方位轴、俯仰轴、第三轴跳码,则判定编码跳码故障;
35.s214、根据方位轴、俯仰轴、第三轴的判定结果,得到方位轴角度跳码、俯仰轴角度跳码、第三轴角度跳码,方位轴角度跳码、俯仰轴角度跳码、第三轴角度跳码分别对应故障树叶子节点{md1}、{md2}、{md3};
36.s215、参考故障定位方位轴、俯仰轴、第三轴的旋变同心度异常、旋变接头故障、线缆故障、编码板故障,以进行人工检查。
37.在本发明的一实施例中,所述步骤s22包括:
38.s221、实时监测天线控制单元中的时间信息和时间跳码状态信息;
39.s222、实时监测时码器的时间信息的连续性,若时间信息不连续,则判定时码跳码故障,或当天线控制单元上报跳秒,则判定时码跳码故障;
40.s223、根据判定结果,得到时间跳秒,时间跳秒对应故障树节点即为时码跳码故障{mc2};
41.s224、参考故障定位时统故障、编码板故障,以进行人工检查。
42.在本发明的一实施例中,所述步骤s31包括:
43.s311、设定方位轴、俯仰轴、第三轴的转速门限、时间门限;
44.s312、实时监测天线控制单元中的天线角度信息;
45.s313、根据方位轴、俯仰轴、第三轴的编码角度计算天线转速,将天线转速与转速门限进行比较,若大于转速门限,且采样时间大于时间门限,则判定天线运行失控;
46.s314、根据天线运行失控的判定结果,得到方位轴失控故障、俯仰轴失控故障、第三轴失控故障,方位轴失控故障、俯仰轴失控故障、第三轴失控故障分别对应故障树叶子节点{md4}、{md5}、{md6};
47.s315、参考故障定位三轴的环路参数异常、功放板故障、跟踪错锁故障、模数转换模块故障、单电机摩擦离合器脱落故障,以进行人工检查。
48.在本发明的一实施例中,所述步骤s32包括:
49.s321、设定方位轴、俯仰轴、第三轴的统计时间、幅度门限、次数门限;
50.s322、实时监测电流传感器的电流采集信息和天线控制单元上报的电机电流信息;
51.s323、计算方位轴、俯仰轴、第三轴的当前电机电流值与前一次电机电流值之间的差值,且在统计时间内,差值大于幅度门限,且电流采集信息的电流极性发生反转的次数大于次数门限,则判定天线震荡故障;
52.s324、根据天线震荡故障的判定结果,得到方位轴震荡故障、俯仰轴震荡故障、第三轴震荡故障,方位轴震荡故障、俯仰轴震荡故障、第三轴震荡故障分别对应故障树叶子节点{md7}、{md8}、{md9};
53.s325、参考故障定位方位轴天线和第三轴天线产生互扰、环路参数不合理、负载发生变化、传动链路故障、阵风扰动,以进行人工检查。
54.在本发明的一实施例中,所述步骤s33包括:
55.s331、设定链路故障巡检的时间门限;
56.s332、实时监测天线控制单元的组播数据和数据帧内各链路的状态信息;
57.s333、在时间门限内,所述天线控制单元上报的数据帧内各链路的状态信息为异常信息,则判定链路异常,且在时间门限内,未接收到天线控制单元的组播数据,则判定链路中断;
58.s334、根据链路异常和链路中断的判定结果,得到时码编码单元链路故障、天线驱动单元链路故障、极化控制单元链路故障、跟踪接收机链路故障、天线控制单元链路故障,时码编码单元链路故障、天线驱动单元链路故障、极化控制单元链路故障、跟踪接收机链路故障分别对应故障树叶子节点{md10}、{md11}、{md12}、{md13},天线控制单元链路故障对应故障树叶子节点{md14}。
59.如上所述,本发明的一种基于故障树的遥感卫星接收天线故障诊断方法,具有以下有益效果:
60.本发明的基于故障树的遥感卫星接收天线故障诊断方法建立并维护故障诊断规则集,依据规则进行推理,通过实时采集到的各项数据对遥感卫星接收天线系统进行综合故障诊断,并针对故障进行定位并给出诊断建议,可以满足大口径遥感卫星地面接收天线系统的故障诊断。
61.本发明的基于故障树的遥感卫星接收天线故障诊断方法对天线驱动单故障原因进行精确分析,研究设备单元失效的各类直接和间接因素,建立故障事件逻辑关系,分析得出全部最小故障割集。
62.本发明的基于故障树的遥感卫星接收天线故障诊断方法首次引入专家知识库对全部最小故障割集进行精确描述,在通过逻辑函数描述设备单元发生各类故障的最小割集、故障树子节点、父节点的组合情况,从而建立本设备单元的完备故障规则集。其中,最小故障割集的实现方法为:参数设定、实时状态监测、专家知识库数据处理、故障结论得出、参考定位、指导意见。
63.本发明的基于故障树的遥感卫星接收天线故障诊断方法通过实际工程验证了该方法的可行性和可靠性,具有较高的故障求解度,能够满足工程需求。
附图说明
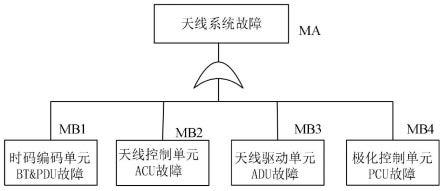
64.图1为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的根节点遥感卫星接收天线系统故障树逻辑结构框图;
65.图2为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的父节点时码编码单元bt&pdu故障树逻辑结构框图;
66.图3为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的父节点天线控制单元acu故障树逻辑结构框图;
67.图4为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的父节点天线驱动单元adu故障树逻辑结构框图;
68.图5为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的子节点天线驱动单元adu的方位轴支路故障树逻辑结构框图;
69.图6为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的子节点天线驱动单元adu的方位轴支路(续)故障树逻辑结构框图;
70.图7为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的子节点天线驱动单元adu的俯仰轴支路故障树逻辑结构框图;
71.图8为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的子节点天线驱动单元adu的俯仰轴支路(续)故障树逻辑结构框图;
72.图9为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的子节点天线驱动单元adu的第三轴支路故障树逻辑结构框图;
73.图10为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的子节点天线驱动单元adu的第三轴支路(续)故障树逻辑结构框图;
74.图11为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的父节点极化控制单元pcu故障树逻辑结构框图。
具体实施方式
75.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
76.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构
想,遂图示中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
77.请参阅图1,图1为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的根节点遥感卫星接收天线系统故障树逻辑结构框图。本发明提供一种基于故障树的遥感卫星接收天线故障诊断方法,建立并维护故障诊断规则集,依据规则进行推理,通过实时采集到的各项数据对遥感卫星接收天线系统进行综合故障诊断,并针对故障进行定位并给出诊断建议,可以满足大口径遥感卫星地面接收天线系统的故障诊断。具体包括:
78.步骤s1、建立根节点遥感卫星接收天线系统故障树,所述根节点遥感卫星接收天线系统故障树的根节点包括时码编码单元故障、天线控制单元故障、天线驱动单元故障以及极化控制单元故障。具体的,所述步骤s1中的建立根节点遥感卫星接收天线系统故障树包括:
79.步骤s11、分析遥感卫星接收天线系统故障发生的原因,并根据事件逻辑,得到中间事件的最小割集{mb1}、{mb2}、{mb3}、{mb4}。具体的,首先分析定位可能引起顶层事件即为遥感卫星接收天线系统故障发生的原因。
80.步骤s12、所述最小割集{mb1}、{mb2}、{mb3}、{mb4}分别对应时码编码单元(bt&pdu)故障、天线控制单元(acu)故障、天线驱动单元(adu)故障、极化控制单元(pcu)故障。
81.步骤s13、以逻辑或门连接所述最小割集{mb1}、{mb2}、{mb3}、{mb4},以建立根节点遥感卫星接收天线系统故障树,所述根节点遥感卫星接收天线系统故障树的根节点ma=mb1∪mb2∪mb3∪mb4。
82.请参阅图2,图2为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的父节点时码编码单元bt&pdu故障树逻辑结构框图。步骤s2、建立父节点时码编码单元故障树,所述父节点时码编码单元故障树包括编码跳码故障和时码跳码故障。
83.所述步骤s2中的建立父节点时码编码单元故障树包括:
84.步骤s20、根据检测到的跳码定位故障原因,得到最小割集为编码跳码故障{mc1}和时码跳码故障{mc2},以逻辑或门连接编码跳码故障{mc1}和时码跳码故障{mc2},时码编码单元故障mb1=mc1∪mc2。
85.步骤s21、对编码跳码故障{mc1}原因进行分析,得到最小割集为方位轴(az)角度跳码、俯仰轴(el)角度跳码、第三轴(til)角度跳码,所述最小割集为方位轴角度跳码、俯仰轴角度跳码、第三轴角度跳码分别对应故障树叶子节点{md1}、{md2}、{md3},以逻辑或门连接故障树叶子节点{md1}、{md2}、{md3},编码跳码故障mc1=md1∪md2∪md3。
86.具体的,所述步骤s21包括:
87.步骤s211、参数设定:设定天线三轴即为方位轴、俯仰轴、第三轴的最大速度参数。
88.步骤s212、三轴编码状态监测:实时监测天线控制单元中的天线角度信息和角度跳码状态信息。
89.步骤s213、数据处理:分别计算方位轴、俯仰轴、第三轴的角编码器的当前天线角度测量值与前一次天线角度测量值之间的差值,若角度差值与采样时间的比值大于设定的最大速度参数,则判定编码跳码故障,或当天线控制单元上报方位轴、俯仰轴、第三轴跳码,则判定编码跳码故障。
90.步骤s214、故障结论:根据方位轴、俯仰轴、第三轴的判定结果,得到方位轴角度跳码、俯仰轴角度跳码、第三轴角度跳码,方位轴角度跳码、俯仰轴角度跳码、第三轴角度跳码分别对应故障树叶子节点{md1}、{md2}、{md3}。
91.步骤s215、参考定位和指导意见:参考故障定位方位轴、俯仰轴、第三轴的旋变同心度异常、旋变接头故障、线缆故障、编码板故障,以进行人工检查。
92.步骤s22、对时码跳码故障{mc2}原因进行分析,得到最小割集为时间跳秒,所述时间跳秒作为故障树叶子节点。
93.具体的,所述步骤s22包括:
94.步骤s221、时码状态监测:实时监测天线控制单元中的时间信息和时间跳码状态信息。
95.步骤s222、数据处理:实时监测时码器的时间信息的连续性,若时间信息不连续,则判定时码跳码故障,或当天线控制单元上报跳秒,则判定时码跳码故障。
96.步骤s223、故障结论:根据判定结果,得到时间跳秒,时间跳秒对应故障树节点即为时码跳码故障{mc2}。
97.步骤s224、参考定位和指导意见:参考故障定位时统故障、编码板故障,以进行人工检查。
98.故障树父节点小结:时码编码单元故障可表述为mb1=mc1∪mc2=md1∪md2∪md3∪mc2。
99.请参阅图3,图3为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的父节点天线控制单元acu故障树逻辑结构框图。步骤s3、建立父节点天线控制单元故障树,所述父节点天线控制单元故障树包括天线失控故障、天线震荡故障以及链路故障。
100.具体的,所述步骤s31包括:
101.步骤s311、参数设定:设定方位轴、俯仰轴、第三轴的转速门限、时间门限。
102.步骤s312、天线角度状态监测:实时监测天线控制单元中的天线角度信息。
103.步骤s313、数据处理:根据方位轴、俯仰轴、第三轴的编码角度计算天线转速,将天线转速与转速门限进行比较,若大于转速门限,且采样时间大于时间门限,则判定天线运行失控。
104.步骤s314、故障结论:根据天线运行失控的判定结果,得到方位轴失控故障、俯仰轴失控故障、第三轴失控故障,方位轴失控故障、俯仰轴失控故障、第三轴失控故障分别对应故障树叶子节点{md4}、{md5}、{md6}。
105.步骤s315、参考定位和指导意见:参考故障定位三轴的环路参数异常、功放板故障、跟踪错锁故障、模数转换模块故障、单电机摩擦离合器脱落故障,以进行人工检查。
106.具体的,所述步骤s32包括:
107.步骤s321、参数设定:设定方位轴、俯仰轴、第三轴的统计时间、幅度门限、次数门限。
108.步骤s322、状态监测:实时监测电流传感器的电流采集信息(直流伺服源)和天线控制单元上报的电机电流信息(交流伺服源)。
109.步骤s323、数据处理:计算方位轴、俯仰轴、第三轴的当前电机电流值与前一次电
机电流值之间的差值,且在统计时间内,差值大于幅度门限,且电流采集信息的电流极性发生反转的次数大于次数门限,则判定天线震荡故障。
110.步骤s324、故障结论:根据天线震荡故障的判定结果,得到方位轴震荡故障、俯仰轴震荡故障、第三轴震荡故障,方位轴震荡故障、俯仰轴震荡故障、第三轴震荡故障分别对应故障树叶子节点{md7}、{md8}、{md9}。
111.步骤s325、参考定位和指导意见:参考故障定位方位轴天线和第三轴天线产生互扰、环路参数不合理、负载发生变化、传动链路故障、阵风扰动,以进行人工检查。
112.所述步骤s33包括:
113.s331、参数设定:设定链路故障巡检的时间门限;
114.s332、状态监测:实时监测天线控制单元的组播数据和数据帧内各链路的状态信息;
115.s333、数据处理:在时间门限内,所述天线控制单元上报的数据帧内各链路的状态信息为异常信息,则判定链路异常,且在时间门限内,未接收到天线控制单元的组播数据,则判定链路中断;
116.s334、故障结论:根据链路异常和链路中断的判定结果,得到时码编码单元链路故障、天线驱动单元链路故障、极化控制单元链路故障、跟踪接收机链路故障、天线控制单元链路故障,时码编码单元链路故障、天线驱动单元链路故障、极化控制单元链路故障、跟踪接收机链路故障分别对应故障树叶子节点{md10}、{md11}、{md12}、{md13},天线控制单元链路故障对应故障树叶子节点{md14}。
117.步骤s335:故障参考定位和指导意见参见表1,表1为链路故障输出信息。
118.表1:
[0119][0120]
故障树父节点小结:acu故障可表述为mb2=mc3∪mc4∪mc5=md4∪md5∪md6∪mc7∪md8∪md9∪md10∪mc11∪md12∪md13∪md14。
[0121]
步骤s4、建立父节点天线驱动单元故障树,所述父节点天线驱动单元故障树包括多个支路故障。
[0122]
传统的故障树分析方法能够较好解决随机不确定性,但在复杂系统中准确建立故障规则集非常困难,导致故障子树的建立逻辑关系不清晰,同时最小割集故障研判定性粗放分析模式和概率分析模式以及在实际应用中也存在较大误差,使得传统故障树应用于复杂系统故障诊断受限。
[0123]
请参阅图4,图4为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的父节点天线驱动单元adu故障树逻辑结构框图。本发明具体实现方法为对天线驱动单故障原因进行精确分析,研究设备单元失效的各类直接和间接因素,建立故障事件逻辑关系,分析得出全部最小故障割集,首次引入专家知识库对全部最小故障割集进行精确描述,在通过逻辑函数描述设备单元发生各类故障的最小割集、故障树子节点、父节点的组合情况,从而建立本设备单元的完备故障规则集。其中,最小故障割集的实现方法为:参数设定、实时状态监测、专家知识库数据处理、故障结论得出、参考定位、指导意见。
[0124]
首先分析定位天线驱动单元故障原因,求得为可细分的隔集为方位轴支路故障
{mc6}、俯仰轴支路故障{mc7}、第三轴支路故障{mc8},以逻辑或门连接,mb3=mc6∪mc7∪mc8。
[0125]
具体地,所述步骤s4包括:
[0126]
请参阅图5,图5为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的子节点天线驱动单元adu的方位轴支路故障树逻辑结构框图。
[0127]
步骤s41、分析方位轴支路故障,得到最小割集为控保开关故障{md15}、方位轴支路机电故障{md16}、插拔锁故障{md17},以逻辑或门连接控保开关故障{md15}、方位轴支路机电故障{md16}、插拔锁故障{md17},方位轴支路故障mc6=md15∪md16∪md17。
[0128]
具体地,所述步骤s41包括:
[0129]
步骤s411、所述控保开关故障{md15}的最小割集为过零开关故障{me1}、限位开关故障{me2}、方位轴支路限位{me3},以逻辑或门连接过零开关故障{me1}、限位开关故障{me2}、方位轴支路限位{me3},md15=me1∪me2∪me3。
[0130]
具体地,所述步骤s411包括:
[0131]
步骤s4111、过零开关故障{me1}:设定统计时间、幅度门限、次数门限,监测天线控制单元上报的方位轴数据帧中的过零开关状态及角度,并对数据进行处理,得出诊断结论及指导意见,具体包括:
[0132]
步骤s41111、参数设定:设定方位轴的统计时间、幅度门限、次数门限。
[0133]
步骤s41112、状态监测:实时监测天线控制单元中的方位轴天线实时角度信息、过零开关状态信息。
[0134]
步骤s41113、数据处理:计算方位轴角度跳码,且当前方位轴天线角度值与前一次方位轴天线角度值相加大于等于358度,则判定过零开关故障;若当前方位轴天线角度值与前一次方位轴天线角度值相加小于358度,且在统计时间内,若过零开关状态发生变化的次数超过次数门限,则判定过零开关故障;当前方位轴天线角度值与前一次方位轴天线角度值相加大于等于358度,若过零开关状态始终未发生变化,则判定过零开关故障;若正负过零同时为真,则判定过零开关故障。具体的,正负过零包括正向过零和负向过零,正向过零指的是天线正向旋转时轴角与前一次的轴角相加大于等于360
°
,负向过零指的是天线负向旋转时轴角与前一次的轴角相加大于360
°
。
[0135]
步骤s41114、故障结论:根据判定结果,得到过零开关故障对应故障树叶子节点即为过零开关故障{me1}。
[0136]
步骤s41115、参考定位和指导意见:参考故障定位方位轴过零开关故障、线缆故障、撞块位置偏移、温度过低开关特性发生变化、开关供电故障,以进行人工检查。
[0137]
步骤s4112、限位开关故障{me2}:设定角度范围、统计时间、调变门限参数,监测天线控制单元常规监测信息上报的方位轴数据帧中的限位状态及天线实时角度并对数据进行处理得出诊断结论及指导意见,具体包括:
[0138]
步骤s41121、参数设定:设定方位轴统计时间、幅度门限、次数门限。
[0139]
步骤s41122、状态监测:实时监测天线控制单元中的天线实时角度信息、限位状态信息。
[0140]
步骤s41123、数据处理:若在设定角度范围以外有限位状态,则判定限位开关故障;依据软限-预限-终限的逻辑进行判断,若无前一级限位状态的情况下出现后一级限位
状态,则判定限位开关故障;统计设定时间内,限位开关状态变化的次数,若开关状态变化的次数超过次数门限,则判定限位开关故障。
[0141]
步骤s41124、故障结论:根据判定结果,得到限位开关故障对应故障树叶子节点即为限位开关故障{me2}。
[0142]
步骤s41125、参考定位和指导意见:参考故障定位开关故障、线缆故障、撞块位置偏移,以进行人工检查。
[0143]
步骤s4113、天线限位状态{me3}:监测天线控制单元中的方位轴数据帧中的天线限位状态,并对数据进行处理得出诊断结论及指导意见,具体包括:
[0144]
步骤s41131、状态监测:实时监测天线控制单元中的限位状态信息。
[0145]
步骤s41132、数据处理:根据天线控制单元上报的天线限位状态,判断故障信息。
[0146]
步骤s41133、故障结论:方位轴逆终限、方位轴逆预限、方位轴顺预限、方位轴顺终限,所述方位轴逆终限、方位轴逆预限、方位轴顺预限、方位轴顺终限分别对应故障树叶子节点mf1、mf2、mf3、mf4。
[0147]
步骤s41134:参考定位和指导意见:天线预限位时,天线控制单元转待机保护,天线驱动单元本控退出预限位;天线终限位时,天线控制单元转待机保护,以进行人工检查。
[0148]
请参阅图6,图6为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的子节点天线驱动单元adu的方位轴支路(续)故障树逻辑结构框图。
[0149]
具体的,所述步骤s412包括:方位轴支路机电故障{md16}故障割集为方位轴驱动故障{me4}和方位轴传动故障{me5},以逻辑或门连接,方位轴支路机电故障md16=me4∪me5,其中,方位轴驱动故障{me4}的割集为方位轴1#驱动故障{mf5}和方位轴2#驱动故障{mf6},me4=mf5∪mf6,其中,方位轴传动故障{me5}的割集为方位轴双链不一致{mf7},方位轴1#传动故障{mf8}、方位轴2#传动故障{mf9},方位轴传动故障me5=mf7∪mf8∪mf9。
[0150]
具体的,所述步骤s412包括:
[0151]
步骤s4121、方位轴驱动故障{me4}:通过检测天线控制单元上报的数字驱动信息进行判断,并得出诊断结论及指导意见,具体包括:
[0152]
步骤s41211、状态监测:实时监测天线控制单元中的数字驱动信息。
[0153]
步骤s41212、数据处理:根据天线控制单元上报的数字驱动,判断故障信息。
[0154]
步骤s41213、参考定位和指导意见:参考定位故障树叶子节点、故障结论、指导意见等详见驱动信息故障输出信息表2,表2为驱动故障输出信息表,以逻辑或门连接方位轴1#驱动故障mf5=mh1∪mh2∪mh3∪mh4∪mh5∪mh6∪mh7∪mh8,方位轴2#驱动故障mf6=mh9∪mh10∪mh11∪mh12∪mh13∪mh14∪mh15∪mh16。
[0155]
表2:
[0156][0157][0158]
步骤s4122、方位轴传动故障{me5}:故障割集为方位轴双链不一致{mf7}、方位轴1#传动故障{mf8}、方位轴2#传动故障{mf9},其中,方位轴双链不一致{mf7}为最小割集,以逻辑或门连接,me5=mf7∪mf8∪mf9。
[0159]
具体的,步骤s4122包括:
[0160]
步骤s41221、方位轴双链不一致{mf7}:设定差值门限、时间门限,监测天线控制单元上报的方位轴电机电流信息和直流伺服传感器的采集信息,具体包括:
[0161]
步骤s412211、参数设定:设定方位轴电机电流信息采集的差值门限、时间门限。
[0162]
步骤s412212、状态监测:实时监测直流伺服传感器的采集信息和天线控制单元上报的电机电流信息。
[0163]
步骤s412213、数据处理:若双链电流差超过差值门限,且持续时间超过时间门限,则判定方位轴双链不一致。
[0164]
步骤s412214、故障结论:方位轴双链不一致对应故障树叶子节点mf7。
[0165]
步骤s412215、参考定位和指导意见:传动双链不一致,以进行人工检查。
[0166]
步骤s41222、方位轴1#传动故障{mf8}、方位轴2#传动故障{mf9}:最小割集为方位轴1#传动链卡滞{mh17}、方位轴2#传动链卡滞{mh19}、方位轴1#摩擦离合器打滑{mh18}、方
位轴2#摩擦离合器打滑{mh20},以逻辑或门连接,方位轴1#传动故障mf8=mh17∪mh18,方位轴2#传动故障mf9=mh19∪t20。
[0167]
具体的,步骤s41222包括:
[0168]
步骤s412221、方位轴1#传动链卡滞{mh17}、方位轴2#传动链卡滞{mh19}:设定速度门限、电流门限、温度门限、时间门限,监测天线控制单元上报的电机相关信息,具体步骤包括:
[0169]
步骤s4122211、参数设定:设定方位轴的速度门限、电流门限、温度门限、时间门限。
[0170]
步骤s4122212、状态监测:实时监测天线控制单元常规监测信息及传感器采集信息中的电机转速、电机电流、电机温度。
[0171]
步骤s4122213、数据处理:若电机测速传感器反馈信息持续时间低于时间门限,且电机电流传感器反馈信息持续时间大于时间门限,则判定方位轴1#传动链卡滞、方位轴2#传动链卡滞;若电机温度传感器反馈信息持续设定时间大于时间门限,且电机电流传感器反馈信息持续时间大于时间门限,则判定方位轴1#传动链卡滞、方位轴2#传动链卡滞。
[0172]
步骤s4122214、故障结论:方位轴1#传动链卡滞、方位轴2#传动链卡滞分别对应故障树叶子节点mh17、mh19。
[0173]
步骤s4122215、参考定位和指导意见:减速箱结冰、轴承卡滞、箱体缺润滑、环路异常、电机故障,以进行人工检查。
[0174]
步骤s412222:方位轴1#摩擦离合器打滑{mh18}、方位轴2#摩擦离合器打滑{mh20}:设定差门限、时间门限,监测天线控制单元上报的电机相关信息和直流电机测试传感器数据信息,具体步骤包括:
[0175]
步骤s4122221、参数设定:设定方位轴的差门限、时间门限。
[0176]
步骤s4122222、状态监测:实时监测直流伺服源于测速传感器采集信息,交流伺服源于天线控制单元上报的电机速度信息。
[0177]
步骤s4122223、数据处理:通过电机速度反馈信息计算双电机转速绝对值的差值,双电机转速绝对值的差值持续一定时间大于设定双电机转速超值门限,则判定方位轴1#摩擦离合器打滑、方位轴2#摩擦离合器打滑。
[0178]
步骤s4122224、故障结论:方位轴1#摩擦离合器打滑、方位轴2#摩擦离合器打滑分别对应故障树叶子节点mh18、mh20。
[0179]
步骤s4122225、参考定位和指导意见:摩擦离合器松动,以进行人工检查。
[0180]
如图5所示,步骤s413、插拔锁故障{md17}:最小故障割集为电机保护{me6}、插锁超时{me7}、拔锁超时{me8},以逻辑或门连接,md17=me6∪me7∪me8。
[0181]
具体的,步骤s413包括:
[0182]
步骤s4131、参数设定:设定方位轴的时间门限。
[0183]
步骤s4132、状态监测:实时监测天线控制单元上报信息。
[0184]
步骤s4133、数据处理:依据天线控制单元上报信息。
[0185]
步骤s4134、故障结论:方位轴插拔锁故障对应故障树叶子节点me6、me7、me8。
[0186]
步骤s4135、参考定位和指导意见:插拔锁电机保护、插拔锁传动异常、插拔锁开关故障、线缆连接故障、插锁位置偏离;一般故障,有保护处理,继续观察。
[0187]
请参阅图7~图10,俯仰轴和第三轴的故障树父节点及叶子节点与方位轴相应故障树父节点及叶子节点相同,同理可得:
[0188]
如图7、图8所示,步骤s42、俯仰轴支路故障{mc7}:俯仰轴支路故障mc7=md18∪md19∪md20=me9∪me10∪me11∪me12∪me13∪me14∪me15=mg1∪mg2∪mg3∪mg4∪mg5∪mg6∪mg7∪mg8∪mg9=mh21∪mh22∪mh23∪mh24∪mh25∪mh26∪mh27∪mh28∪mh29∪mh30∪mh31∪mh32∪mh33∪mh34∪mh35∪mh36∪mh37∪mh38∪mh39∪mh40。
[0189]
如图9、图10所示,步骤s42、til支路故障{mc8}:til支路故障mc8=md21∪md22∪md23=me16∪me17∪me18∪me19∪me20∪me21∪me22∪me23=mg10∪mg12∪mg13∪mg14∪mg15∪mg16∪mg17∪mg18∪mg19=mh41∪mh42∪mh43∪mh44∪mh45∪mh46∪mh47∪mh48∪mh49∪mh50∪mh51∪mh52∪mh53∪mh54∪mh55∪mh56∪mh57∪mh58∪mh59∪mh60。
[0190]
请参阅图11,图11为本技术实施例提供的一种基于故障树的遥感卫星接收天线故障诊断方法的父节点极化控制单元pcu故障树逻辑结构框图。步骤s5、建立父节点极化控制单元故障树,所述父节点极化控制单元故障树包括多个极化控制器控制超时故障。分析定位极化控制单元故障原因,最小隔集为1号极化控制器、2号极化控制器、3号极化控制器、4号极化控制器、5号极化控制器、6号极化控制器控制超时{mc9}、{mc10}、{mc11}、{mc12}、{mc13}、{mc14},mb4=mc9∪mc10∪mc11∪mc12∪mc13∪mc114。
[0191]
具体的,所述步骤s5包括:
[0192]
步骤s51、1号极化控制器、2号极化控制器、3号极化控制器、4号极化控制器、5号极化控制器、6号极化控制器控制超时,设定极化控制器监控时间门限,通过天线控制单元上报的监控信息判断极化控制是否超时。
[0193]
具体的,所述步骤s51包括:
[0194]
步骤s511、参数设定:设定1号极化控制器、2号极化控制器、3号极化控制器、4号极化控制器、5号极化控制器、6号极化控制器监控时间门限。
[0195]
步骤s512、参数检测:监测天线控制单元中的1号极化控制器、2号极化控制器、3号极化控制器、4号极化控制器、5号极化控制器、6号极化控制器控制响应时间。
[0196]
步骤s513、数据处理:控制响应时间高于时间门限,且持续时间大于时间门限,则判定1号极化控制器、2号极化控制器、3号极化控制器、4号极化控制器、5号极化控制器、6号极化控制器控制超时。
[0197]
步骤s514、故障结论:1号极化控制器、2号极化控制器、3号极化控制器、4号极化控制器、5号极化控制器、6号极化控制器控制超时,分别对应故障树叶子节点mc9、mc10、mc11、mc12、mc13、mc14。
[0198]
步骤s515、参考定位和指导意见:1号极化控制器、2号极化控制器、3号极化控制器、4号极化控制器、5号极化控制器、6号极化控制器控制超工作异常;一般故障,必要时采取相应措施解决。
[0199]
综上所述,本发明的基于故障树的遥感卫星接收天线故障诊断方法建立并维护故障诊断规则集,依据规则进行推理,通过实时采集到的各项数据对遥感卫星接收天线系统进行综合故障诊断,并针对故障进行定位并给出诊断建议,可以满足大口径遥感卫星地面接收天线系统的故障诊断。
[0200]
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟
悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1