定位方法、装置、存储介质及机器人与流程
本公开涉及机器人控制领域,尤其涉及一种定位方法、装置、存储介质及机器人。
背景技术:
1、通常移动机器人在进行目标拦截追踪的过程中,传统的拦截追踪方法大多是基于机器视觉技术和深度信息实现对追踪对象的定位,机器视觉技术主要用计算机来模拟人的视觉功能,从客观事物的图像中提取信息,进行处理并加以理解,最终用于实际检测、测量和控制。基于机器视觉技术的追踪方案由于需要用到追踪物体的图像,因此很容易受到图像传感器视野范围的影响,且容易因为光线或者存在遮挡的现象而造成定位错误,进而出现追踪对象追丢的现象。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种定位方法、装置、存储介质及机器人。
2、根据本公开实施例的第一方面,提供一种定位方法,应用于移动机器人,所述方法包括:
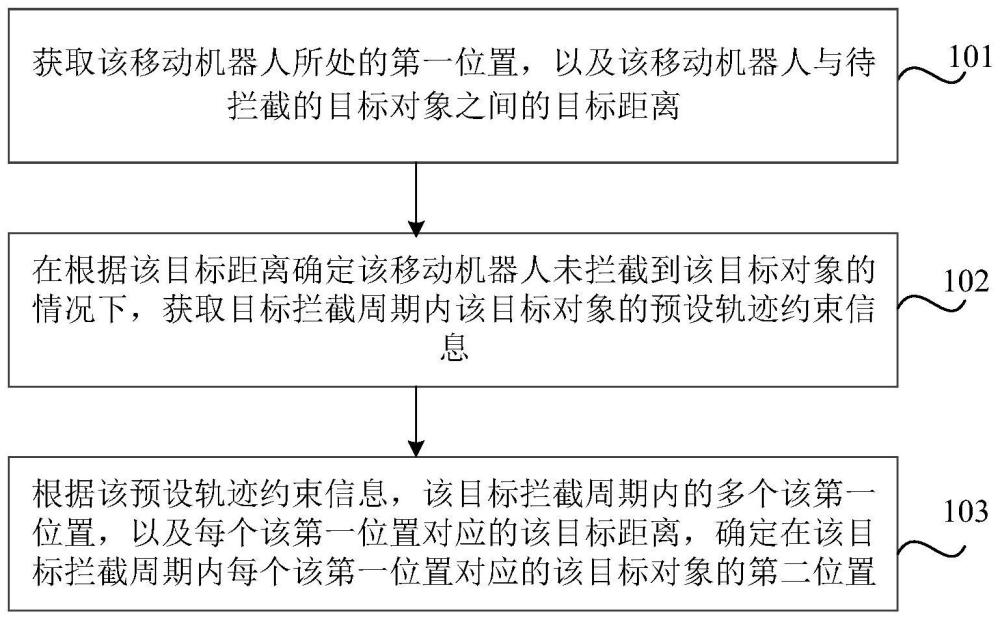
3、获取所述移动机器人所处的第一位置,以及所述移动机器人与待拦截的目标对象之间的目标距离;
4、在根据所述目标距离确定所述移动机器人未拦截到所述目标对象的情况下,获取目标拦截周期内所述目标对象的预设轨迹约束信息,所述预设轨迹约束信息用于表征所述目标对象的移动轨迹的曲线类型;
5、根据所述预设轨迹约束信息,所述目标拦截周期内的多个所述第一位置,以及每个所述第一位置对应的所述目标距离,确定在所述目标拦截周期内每个所述第一位置对应的所述目标对象的第二位置。
6、可选地,所述根据所述预设轨迹约束信息,所述目标拦截周期内的多个所述第一位置,以及每个所述第一位置对应的所述目标距离,确定在所述目标拦截周期内每个所述第一位置对应的第二位置,包括:
7、根据所述目标拦截周期内的每个所述第一位置和所述第一位置对应的所述目标距离建立距离约束方程,所述距离约束方程用于表征所述第一位置与第二位置之间的距离为所述第一位置对应的所述目标距离;
8、根据所述预设轨迹约束信息和所述距离约束方程确定所述目标拦截周期内的每个第一位置对应的第二位置。
9、可选地,所述根据所述目标距离确定所述移动机器人未拦截到所述目标对象,包括:
10、在所述目标距离大于预设距离阈值的情况下,确定所述移动机器人未拦截到所述目标对象;或者,
11、在所述目标距离小于或者等于预设距离阈值的情况下,若确定所述目标对象的当前移动速度大于预设速度阈值,则确定所述移动机器人未拦截到所述目标对象。
12、可选地,所述根据所述目标距离确定所述移动机器人未拦截到所述目标对象,包括:
13、在所述目标距离小于或者等于预设距离阈值的情况下,若确定所述目标对象的当前移动速度小于或者等于所述预设速度阈值,则获取当前采集所述移动机器人所处的第一位置的累计时长,在确定所述累计时长小于预设的拦截周期时长的情况下,确定所述移动机器人未拦截到所述目标对象。
14、可选地,所述方法还包括:
15、根据所述移动机器人的当前第一位置和所述目标拦截周期内每个所述第一位置对应的第二位置,控制所述移动机器人拦截所述目标对象。
16、可选地,所述根据所述移动机器人的当前第一位置和所述目标拦截周期内每个所述第一位置对应的第二位置控制所述移动机器人拦截所述目标对象,包括:
17、根据所述目标拦截周期内的多个所述第二位置和所述当前第一位置确定所述移动机器人的目标移动方向和目标移动速度;
18、控制所述移动机器人按照所述目标移动速度和所述目标前进方向移动,以拦截所述目标对象。
19、可选地,根据所述目标拦截周期内的多个所述第二位置和所述当前第一位置确定所述移动机器人的目标移动方向和目标移动速度,包括:
20、根据多个所述第二位置确定所述目标对象的待定移动方向和待定移动速度;
21、根据所述目标对象的当前第二位置,所述待定移动方向和所述待定移动速度,确定所述移动机器人的所述目标移动速度和所述目标移动方向。
22、可选地,所述根据所述目标对象的当前第二位置,所述待定移动方向和所述待定移动速度,确定所述移动机器人的所述目标移动速度和所述目标移动方向,包括:
23、根据所述待定移动方向和所述待定移动速度预测所述目标对象在指定时间段内在指定方向的目标轨迹,以及所述目标对象到达所述目标轨迹中指定位置处的所需的目标时间;
24、根据所述当前第一位置和所述指定位置确定所述移动机器人的待移动距离;
25、根据所述待移动距离和所述目标时间确定所述目标移动速度;
26、根据所述当前第一位置和所述指定位置确定所述目标移动方向。
27、可选地,所述方法还包括:
28、在确定所述移动机器人拦截到所述目标对象的情况下,输出拦截成功提示信息。
29、可选地,确定所述移动机器人拦截到所述目标对象,包括:
30、在所述目标距离小于或者等于预设距离阈值的情况下,若确定所述目标对象的当前移动速度小于或者等于所述预设速度阈值,且确定当前采集所述移动机器人所处的第一位置的累计时长大于或者等于预设的拦截周期时长,则确定所述移动机器人拦截到所述目标对象。
31、根据本公开实施例的第二方面,提供一种定位装置,应用于移动机器人,所述装置包括:
32、获取模块,被配置为获取所述移动机器人所处的第一位置,以及所述移动机器人与待拦截的目标对象之间的目标距离;
33、第一确定模块,被配置为在根据所述目标距离确定所述移动机器人未拦截到所述目标对象的情况下,获取目标拦截周期内所述目标对象的预设轨迹约束信息,所述预设轨迹约束信息用于表征所述目标对象的移动轨迹的曲线类型;
34、第二确定模块,被配置为根据所述预设轨迹约束信息,所述目标拦截周期内的多个所述第一位置,以及每个所述第一位置对应的所述目标距离,确定在所述目标拦截周期内每个所述第一位置对应的所述目标对象的第二位置
35、可选地,所述第二确定模块,被配置为:
36、根据所述目标拦截周期内的每个所述第一位置和所述第一位置对应的所述目标距离建立距离约束方程,所述距离约束方程用于表征所述第一位置与第二位置之间的距离为所述第一位置对应的所述目标距离;
37、根据所述预设轨迹约束信息和所述距离约束方程确定所述目标拦截周期内的每个第一位置对应的第二位置。
38、可选地,所述第一确定模块,被配置为:
39、在所述目标距离大于预设距离阈值的情况下,确定所述移动机器人未拦截到所述目标对象;或者,
40、在所述目标距离小于或者等于预设距离阈值的情况下,若确定所述目标对象的当前移动速度大于预设速度阈值,则确定所述移动机器人未拦截到所述目标对象。
41、可选地,所述第一确定模块,被配置为:
42、在所述目标距离小于或者等于预设距离阈值的情况下,若确定所述目标对象的当前移动速度小于或者等于所述预设速度阈值,则获取当前采集所述移动机器人所处的第一位置的累计时长,在确定所述累计时长小于预设的拦截周期时长的情况下,确定所述移动机器人未拦截到所述目标对象。
43、可选地,所述装置还包括:控制模块,被配置为根据所述移动机器人的当前第一位置和所述目标拦截周期内每个所述第一位置对应的第二位置,控制所述移动机器人拦截所述目标对象。
44、可选地,所述控制模块,被配置为:
45、根据所述目标拦截周期内的多个所述第二位置和所述当前第一位置确定所述移动机器人的目标移动方向和目标移动速度;
46、控制所述移动机器人按照所述目标移动速度和所述目标前进方向移动,以拦截所述目标对象。
47、可选地,所述控制模块,被配置为:
48、根据多个所述第二位置确定所述目标对象的待定移动方向和待定移动速度;
49、根据所述目标对象的当前第二位置,所述待定移动方向和所述待定移动速度,确定所述移动机器人的所述目标移动速度和所述目标移动方向。
50、可选地,所述控制模块,被配置为:
51、根据所述待定移动方向和所述待定移动速度预测所述目标对象在指定时间段内在指定方向的目标轨迹,以及所述目标对象到达所述目标轨迹中指定位置处的所需的目标时间;
52、根据所述当前第一位置和所述指定位置确定所述移动机器人的待移动距离;
53、根据所述待移动距离和所述目标时间确定所述目标移动速度;
54、根据所述当前第一位置和所述指定位置确定所述目标移动方向。
55、可选地,所述装置还包括:
56、第三确定模块,被配置为在确定所述移动机器人拦截到所述目标对象的情况下,输出拦截成功提示信息。
57、可选地,所述第三确定模块,被配置为:
58、在所述目标距离小于或者等于预设距离阈值的情况下,若确定所述目标对象的当前移动速度小于或者等于所述预设速度阈值,且确定当前采集所述移动机器人所处的第一位置的累计时长大于或者等于预设的拦截周期时长,则确定所述移动机器人拦截到所述目标对象。
59、根据本公开实施例的第三方面,提供一种定位装置,包括:
60、处理器;
61、用于存储处理器可执行指令的存储器;
62、其中,所述处理器被配置为:
63、实现以上第一方面所述方法的步骤。
64、根据本公开实施例的第四方面,提供计算机可读存储介质,其上存储有计算机程序指令,该程序指令被处理器执行时实现以上第一方面所述方法的步骤。
65、根据本公开实施例的第五方面,提供一种机器人,包括处理器和接口;所述处理器用于读取指令以执行以上第一方面所述的方法。
66、本公开的实施例提供的技术方案可以包括以下有益效果:
67、通过获取所述移动机器人所处的第一位置,以及所述移动机器人与待拦截的目标对象之间的目标距离;在根据所述目标距离确定所述移动机器人未拦截到所述目标对象的情况下,获取目标拦截周期内所述目标对象的预设轨迹约束信息,所述预设轨迹约束信息用于表征所述目标对象的移动轨迹的曲线类型;由于能够根据所述预设轨迹约束信息,所述目标拦截周期内的多个所述第一位置,以及每个所述第一位置对应的所述目标距离,确定在所述目标拦截周期内每个所述第一位置对应的所述目标对象的第二位置,无需利用视觉图像基于机器视觉技术和深度信息实现对拦截追踪对象的定位,因此不仅能够避免拦截目标对象过程中,对视觉图像的依赖,从而避免因为光线或者存在遮挡而造成定位错误的现象,进而有利于提升对目标对象定位的准确性,还能够减少拦截追踪过程中所需的计算量,提升对目标对象的追踪效率。
68、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!