一种基于环境状况的机器人行进控制方法、系统、设备及存储介质与流程
本技术各实施例属于物流机器人,特别是涉及一种基于环境状况的机器人行进控制方法、系统、设备及存储介质。
背景技术:
1、物流机器人用于面向不便于外卖员、快递员进入的封闭管理写字楼、园区、社区、校园等,实现包裹、信件、餐饮等物品的物流配送。
2、物流机器人自身是一个智能装备,具有必要的软硬件配置,可以实现物流配送过程中的全作业环节的自主执行,不需要运营中心遥控,自主执行的作业环节包括但不限于:任务接单、路径规划、激光雷达周边场景感知、导航行进和避障等。
3、物流机器人还集成了多种类型的传感器以及智能控制器,物流机器人可以在执行物流配送任务的过程中,自动形成并记录作业进程数据。作业进程数据包括:路径记录、物流配送过程中的周边场景目标数据、动作执行数据等。
4、物流机器人接入无线宽带物联网,具备上下行网络通信能力,可与云端的运营中心保持实时通信。物流机器人运行全过程中,所述作业进程数据保持实时上传。
5、机器人在物流配送过程中的自主行进,与其所在的环境状况具有紧密的联系。环境状况包括:(1)路径空间环境:即机器人行进路径沿途空间的路面、障碍物、交通标识;(2)场景动态环境:即机器人行进沿途的人流、车流等动态目标状况;(3)自然天气环境:包括风速、风向、雨雪状态、雾霾、温湿度等;(4)室内外的光照环境。
6、以上环境状况与机器人行进的平稳性、安全性、合规性、视觉感知的能见度相关,机器人适应以上环境状况而执行与行进路线、行进速度、行进中的规避绕行策略相关的设定。
7、目前,针对以上环境状况的监测主要是依靠物流机器人自身搭载的传感器、摄像机、激光雷达等,即由机器人单机执行监测,并适应环境状况进行机器人行进的设定。
8、因此,现有的针对物流机器人的行进控制方法存在以下问题:
9、(1)对环境状况变化的预测性不足:对应动态变化较大的环境状况,机器人无法准确预判,只能事后响应。
10、(2)对于多种环境状况复杂叠加的情况,例如夜间、雨雪天气叠加高动态的车流人流,机器人缺乏适应能力,且响应速度经常无法达到预期。
11、(3)环境状况监测的覆盖不全面,对于物流机器人整个工作区域来看,只能对一部分区域进行有效的监测,存在较多监测盲区。
技术实现思路
1、本技术实施例的目的在于提供一种基于环境状况的机器人行进控制方法、系统、设备及存储介质,在行进的过程中,当出现动态变化较大的环境状况时,能够对环境状况的变化进行准确的预测,对于多种环境状况复杂叠加的情况,能够响应迅速,并且对环境状况监测的覆盖更加全面,从而解决背景技术中的问题。
2、为了解决上述技术问题,本技术实施例提供的基于环境状况的机器人行进控制方法、系统、设备及存储介质的技术方案具体如下:
3、第一方面,本技术实施例公开了一种基于环境状况的机器人行进控制方法,所述方法包括以下步骤:
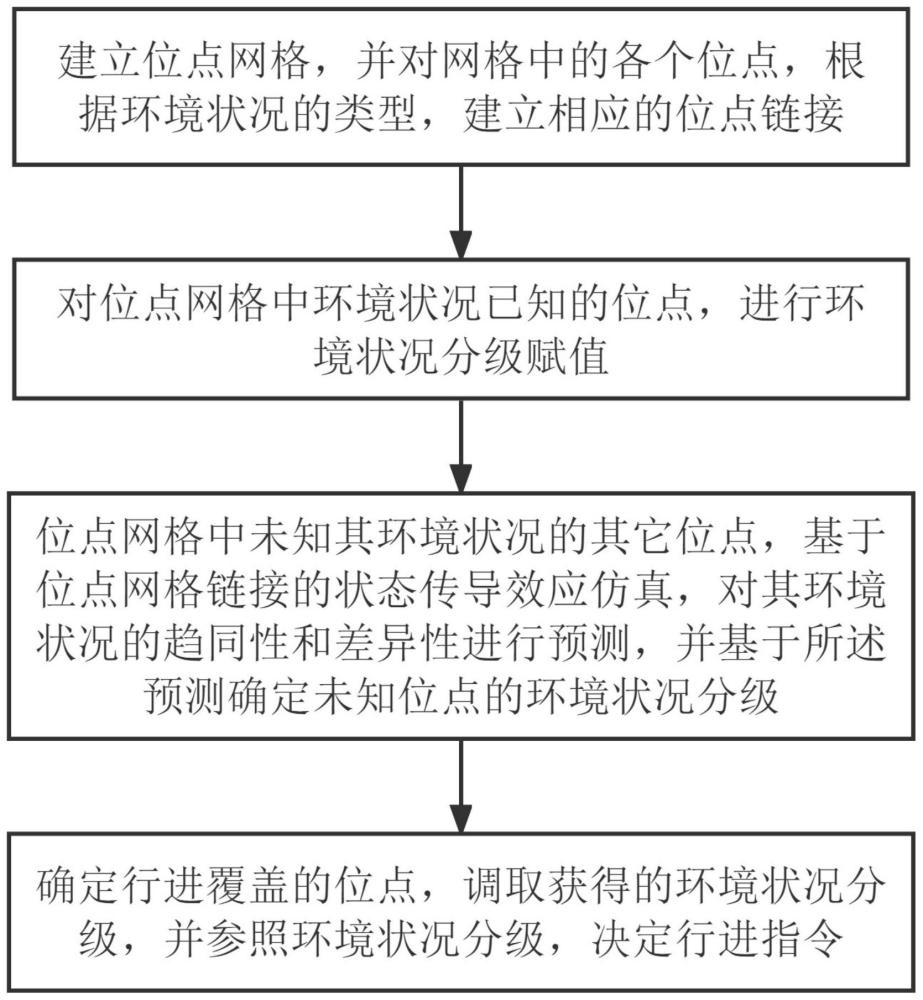
4、建立位点网格,并对网格中的各个位点,根据环境状况的类型,建立相应的位点链接;
5、对位点网格中环境状况已知的位点,进行环境状况分级赋值;
6、位点网格中未知其环境状况的其它位点,基于位点网格链接的状态传导效应仿真,对其环境状况的趋同性和差异性进行预测,并基于所述预测确定未知位点的环境状况分级;
7、确定行进覆盖的位点,调取获得的环境状况分级,并参照环境状况分级,决定行进指令。
8、在上述任一方案中优选的实施例,所述建立位点网格,具体包括:
9、建立覆盖物流机器人的整个工作区域的若干数量的位点网格,其中,位点可根据机器人执行物流配送的途经发生率,在发生率高的局部区域设立数量多、分布密度大的位点。
10、在上述任一方案中优选的实施例,所述根据环境状况的类型,建立相应的位点链接,具体包括以下步骤:
11、针对路径空间环境和场景动态环境,根据工作区域内机器人的交通路径,构建位点之间的链接;或
12、针对自然天气环境和室内外光照环境,根据位点之间的位置邻近关系和空间联通关系,构建位点之间的链接;或
13、将自然天气环境和室内外光照环境,根据位点之间的位置邻近关系和空间联通关系,构建位点之间的链接。
14、在上述任一方案中优选的实施例,所述对位点网格中环境状况已知的位点,进行环境状况分级赋值,具体包括以下步骤:
15、获取多台物流机器人在配送过程中实时途经的位点;
16、在途经的所述位点采集和上传描述环境状况的参数;
17、对途经的所述位点的环境状况分级赋值。
18、在上述任一方案中优选的实施例,所述确定未知位点的环境状况分级,具体包括以下步骤:
19、将位点网格中的任一位点i,确定为接收到其具有链接的其它位点的环境状况传导;
20、根据所述位点i自身及其所在群组中的其它位点对环境状况传导的响应,评估其传导效应值;
21、基于所述位点i以及与其具备链接关系的其它位点的传导效应值,仿真预测该位点i的环境状况趋同性g和环境状况差异性s;
22、根据对仿真预测的所述位点i在环境状况趋同性g和环境状况差异性s之间转换的概率,确定所述位点i处于环境状况趋同性g或环境状况差异性s。
23、在上述任一方案中优选的实施例,所述确定未知位点的环境状况分级,具体还包括以下步骤:
24、确定位点网格中未进行环境状况分级赋值的位点;
25、判断未进行环境状况分级赋值的位点处于环境状况趋同性g或环境状况差异性s;
26、根据未知位点处于环境状况趋同性g或环境状况差异性s,对未知位点的环境状况进行分级赋值,其中,处于环境状况趋同性g的位点赋予与已知位点相同的环境状况分级,处于环境状况差异性的位点保持其原有的环境状况分级。
27、在上述任一方案中优选的实施例,所述行进指令,包括行进路线、行进速度、行进中的规避绕行策略。
28、与现有技术相比,本技术实施例的基于环境状况的机器人行进控制方法,通过对位点网格中环境状况已知的位点,进行环境状况分级赋值,位点网格中未知其环境状况的其它位点,基于位点网格链接的状态传导效应仿真,对其环境状况的趋同性和差异性进行预测,并基于所述预测确定未知位点的环境状况分级,在行进的过程中,当出现动态变化较大的环境状况时,能够对环境状况的变化进行准确的预测,对于多种环境状况复杂叠加的情况,能够响应迅速,并且对环境状况监测的覆盖更加全面。
29、第二方面,一种基于环境状况的机器人行进控制系统,包括:
30、建立模块,用于建立位点网格,并对网格中的各个位点,根据环境状况的类型,建立相应的位点链接;所述建立位点网格,具体包括:建立覆盖物流机器人的整个工作区域的若干数量的位点网格,其中,位点可根据机器人执行物流配送的途经发生率,在发生率高的局部区域设立数量多、分布密度大的位点;所述根据环境状况的类型,建立相应的位点链接,具体包括以下步骤:针对路径空间环境和场景动态环境,根据工作区域内机器人的交通路径,构建位点之间的链接;或针对自然天气环境和室内外光照环境,根据位点之间的位置邻近关系和空间联通关系,构建位点之间的链接;或将自然天气环境和室内外光照环境,根据位点之间的位置邻近关系和空间联通关系,构建位点之间的链接;
31、赋值模块,用于对位点网格中环境状况已知的位点,进行环境状况分级赋值;所述对位点网格中环境状况已知的位点,进行环境状况分级赋值,具体包括以下步骤:获取多台物流机器人在配送过程中实时途经的位点;在途经的所述位点采集和上传描述环境状况的参数;对途经的所述位点的环境状况分级赋值;
32、分级模块,用于对位点网格中未知其环境状况的其它位点,基于位点网格链接的状态传导效应仿真,对其环境状况的趋同性和差异性进行预测,并基于所述预测确定未知位点的环境状况分级;所述确定未知位点的环境状况分级,具体包括以下步骤:将位点网格中的任一位点i,确定为接收到其具有链接的其它位点的环境状况传导;根据所述位点i自身及其所在群组中的其它位点对环境状况传导的响应,评估其传导效应值;基于所述位点i以及与其具备链接关系的其它位点的传导效应值,仿真预测该位点i的环境状况趋同性g和环境状况差异性s;根据对仿真预测的所述位点i在环境状况趋同性g和环境状况差异性s之间转换的概率,确定所述位点i处于环境状况趋同性g或环境状况差异性s;
33、处理模块,用于确定行进覆盖的位点,调取获得的环境状况分级,并参照环境状况分级,决定行进指令。
34、第二方面与第一方面其有益效果一致,故在此不再赘述。
35、第三方面,一种基于环境状况的机器人行进控制设备,包括:
36、存储器,用于存储计算机程序;
37、处理器,用于执行所述计算机程序时实现所述的基于环境状况的机器人行进控制方法的步骤。
38、第三方面与第一方面其有益效果一致,故在此不再赘述。
39、第四方面,一种存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的基于环境状况的机器人行进控制方法。
40、第四方面与第一方面其有益效果一致,故在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!