信号控制方法、模块、装置、终端设备及存储介质与流程
1.本技术涉及信号控制技术领域,尤其涉及一种信号控制方法、模块、装置、终端设备及存储介质。
背景技术:
2.随着无人机技术日益成熟,其在航拍、环境勘探、应急救援等领域得到广泛应用,能够在极端环境或者人难以到达的环境中进行作业,承担了越来越多的复杂工作任务。因此,对无人机自身的飞行安全和执行任务的可靠性提出了更高的要求,其中涉及无人机重要动作的信号控制,例如打开机载降落伞、投放物品、点火弹射等。对于一些成本有限且无法搭载火工品保护设备进行信号控制的中小型无人机来说,多采用无人机本身直接输出的电平信号或者地/开信号作为控制信号。但是此种信号控制方式容易受到干扰导致误触发,例如突然打开机载降落伞,会严重影响无人机飞行安全。
技术实现要素:
3.本技术的主要目的在于提供一种信号控制方法、模块、装置、终端设备及存储介质,旨在解决无人机控制信号受干扰导致误触发,进而影响无人机飞行安全的问题。
4.为实现上述目的,本技术提供一种信号控制方法,所述信号控制方法应用于信号控制模块,所述信号控制模块作为扩展模块设置于无人机,所述信号控制方法包括:
5.接收所述无人机的飞控系统发送的解锁信号和使能信号;
6.基于所述解锁信号和所述使能信号进行控制信号输出供电;
7.接收所述无人机的飞控系统发送的第一控制信号;
8.基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。
9.可选地,所述基于所述解锁信号和所述使能信号进行控制信号输出供电的步骤之前,还包括:
10.接收所述无人机的飞控系统发送的第一地/开信号;
11.所述基于所述解锁信号和所述使能信号进行控制信号输出供电的步骤包括:
12.基于所述第一地/开信号、所述解锁信号和所述使能信号进行控制信号输出供电。
13.可选地,所述基于所述解锁信号和所述使能信号进行控制信号输出供电的步骤之前,还包括:
14.设置控制信号输出窗口时间;
15.所述基于所述解锁信号和所述使能信号进行控制信号输出供电的步骤包括:
16.基于所述控制信号输出窗口时间、所述解锁信号和所述使能信号进行控制信号输出供电。
17.可选地,所述基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号的步骤之后,还包括:
18.基于所述第二控制信号向所述无人机的飞控系统反馈控制信号输出结果。
19.可选地,所述基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号的步骤包括:
20.将所述第一控制信号转换为第二地/开信号;
21.基于所述第二地/开信号向所述无人机搭载的被控设备输出所述第二控制信号。
22.为实现上述目的,本技术还提供一种信号控制方法,所述信号控制方法应用于无人机,所述无人机设置信号控制模块作为扩展模块,所述信号控制方法包括:
23.通过所述无人机的飞控系统向所述信号控制模块发送解锁信号和使能信号,以供所述信号控制模块基于所述解锁信号和所述使能信号进行控制信号输出供电;
24.通过所述无人机的飞控系统向所述信号控制模块发送第一控制信号,以供所述信号控制模块基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。
25.为实现上述目的,本技术还提供一种信号控制模块,所述信号控制模块作为扩展模块设置于无人机,所述信号控制模块包括mcu最小电路单元、解锁使能单元、电源控制单元、信号输出单元;
26.所述mcu最小电路单元,用于接收所述无人机的飞控系统发送的第一控制信号;
27.所述解锁使能单元,用于接收所述无人机的飞控系统发送的解锁信号和使能信号,基于所述解锁信号和所述使能信号输出电源控制信号;
28.所述电源控制单元,用于基于电源控制信号进行控制信号输出供电;
29.所述信号输出单元,用于基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。
30.为实现上述目的,本技术还提供一种信号控制装置,所述信号控制装置包括:
31.第一接收模块,用于接收无人机的飞控系统发送的解锁信号和使能信号;
32.供电模块,用于基于所述解锁信号和所述使能信号进行控制信号输出供电;
33.第二接收模块,用于接收所述无人机的飞控系统发送的第一控制信号;
34.输出模块,用于基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。
35.本技术实施例还提出一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的信号控制程序,所述信号控制程序被所述处理器执行时实现如上所述的信号控制方法的步骤。
36.本技术实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有信号控制程序,所述信号控制程序被处理器执行时实现如上所述的信号控制方法的步骤。
37.本技术实施例提出的信号控制方法、模块、装置、终端设备及存储介质,通过接收所述无人机的飞控系统发送的解锁信号和使能信号;基于所述解锁信号和所述使能信号进行控制信号输出供电;接收所述无人机的飞控系统发送的第一控制信号;基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。基于本技术方案,信号控制模块在接收到无人机的飞控系统发送的解锁信号和使能信号,在解锁信号和使能信号的共同作用下对控制信号输出进行供电,然后接收并基于无人机的飞控系统发送的第一控制信号输出第二控制信号,以控制无人机搭载的被控设备。如果缺少了解锁信号和使能信号中的任意一种信号,将无法对被控设备输出控制信号,如此保证了对被控设备的安全控制,解决了
无人机控制信号受干扰导致误触发,进而影响无人机飞行安全的问题。
附图说明
38.图1为本技术信号控制装置所属终端设备的功能模块示意图;
39.图2为本技术信号控制方法第一示例性实施例流程示意图;
40.图3为本技术信号控制方法第二示例性实施例流程示意图;
41.图4为本技术信号控制方法第三示例性实施例流程示意图;
42.图5为本技术信号控制方法第四示例性实施例流程示意图;
43.图6为本技术信号控制方法第五示例性实施例流程示意图;
44.图7为本技术信号控制方法第六示例性实施例流程示意图;
45.图8为本技术信号控制模块实施例涉及的模块示意图;
46.图9为本技术信号控制模块在无人机系统中的连接关系的第一示意图;
47.图10为本技术信号控制模块在无人机系统中的连接关系的第二示意图;
48.图11为本技术涉及的解锁使能单元与电源控制单元的电路示意图;
49.图12为本技术涉及的信号输出单元的电路示意图。
50.本技术目的的实现、功能特点及优点将结合实施例,参照附图作进一步说明。
具体实施方式
51.应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
52.本技术实施例的主要解决方案是:接收所述无人机的飞控系统发送的解锁信号和使能信号;基于所述解锁信号和所述使能信号进行控制信号输出供电;接收所述无人机的飞控系统发送的第一控制信号;基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。基于本技术方案,信号控制模块在接收到无人机的飞控系统发送的解锁信号和使能信号,在解锁信号和使能信号的共同作用下对控制信号输出进行供电,然后接收并基于无人机的飞控系统发送的第一控制信号输出第二控制信号,以控制无人机搭载的被控设备。如果缺少了解锁信号和使能信号中的任意一种信号,将无法对被控设备输出控制信号,如此保证了对被控设备的安全控制,解决了无人机控制信号受干扰导致误触发,进而影响无人机飞行安全的问题。
53.具体地,参照图1,图1为本技术信号控制装置所属终端设备的功能模块示意图。该信号控制装置可以为独立于终端设备的、能够进行信号控制的装置,其可以通过硬件或软件的形式承载于终端设备上。该终端设备可以为手机、平板电脑等具有数据处理功能的智能移动终端,还可以为具有数据处理功能的固定终端设备或服务器等。
54.在本实施例中,该信号控制装置所属终端设备至少包括输出模块110、处理器120、存储器130以及通信模块140。
55.存储器130中存储有操作系统以及信号控制程序,信号控制装置可以将接收的无人机的飞控系统发送的解锁信号和使能信号;基于解锁信号和所述使能信号输出的电源控制信号;接收的无人机的飞控系统发送的第一控制信号;以及基于第一控制信号向无人机搭载的被控设备输出的第二控制信号等信息存储于该存储器130中;输出模块110可为显示屏等。通信模块140可以包括wifi模块、移动通信模块以及蓝牙模块等,通过通信模块140与
外部设备或服务器进行通信。
56.其中,存储器130中的信号控制程序被处理器执行时实现以下步骤:
57.接收所述无人机的飞控系统发送的解锁信号和使能信号;
58.基于所述解锁信号和所述使能信号进行控制信号输出供电;
59.接收所述无人机的飞控系统发送的第一控制信号;
60.基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。
61.进一步地,存储器130中的信号控制程序被处理器执行时还实现以下步骤:
62.接收所述无人机的飞控系统发送的第一地/开信号;
63.基于所述第一地/开信号、所述解锁信号和所述使能信号进行控制信号输出供电。
64.进一步地,存储器130中的信号控制程序被处理器执行时还实现以下步骤:
65.设置控制信号输出窗口时间;
66.基于所述控制信号输出窗口时间、所述解锁信号和所述使能信号进行控制信号输出供电。
67.进一步地,存储器130中的信号控制程序被处理器执行时还实现以下步骤:
68.基于所述第二控制信号向所述无人机的飞控系统反馈控制信号输出结果。
69.进一步地,存储器130中的信号控制程序被处理器执行时还实现以下步骤:
70.将所述第一控制信号转换为第二地/开信号;
71.基于所述第二地/开信号向所述无人机搭载的被控设备输出所述第二控制信号。
72.进一步地,存储器130中的信号控制程序被处理器执行时还实现以下步骤:
73.通过所述无人机的飞控系统向所述信号控制模块发送解锁信号和使能信号,以供所述信号控制模块基于所述解锁信号和所述使能信号进行控制信号输出供电;
74.通过所述无人机的飞控系统向所述信号控制模块发送第一控制信号,以供所述信号控制模块基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。
75.本实施例通过上述方案,具体通过接收所述无人机的飞控系统发送的解锁信号和使能信号;基于所述解锁信号和所述使能信号进行控制信号输出供电;接收所述无人机的飞控系统发送的第一控制信号;基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。本实施例中,信号控制模块在接收到无人机的飞控系统发送的解锁信号和使能信号,在解锁信号和使能信号的共同作用下对控制信号输出进行供电,然后接收并基于无人机的飞控系统发送的第一控制信号输出第二控制信号,以控制无人机搭载的被控设备。如果缺少了解锁信号和使能信号中的任意一种信号,将无法对被控设备输出控制信号,如此保证了对被控设备的安全控制,解决了无人机控制信号受干扰导致误触发,进而影响无人机飞行安全的问题。
76.本技术第一实施涉及无人机、信号控制模块以及被控模块。
77.无人机泛指利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机出厂自带飞控系统(即飞行控制系统),该系统可用来保证飞行器的稳定性和操纵性、提高完成任务的能力与飞行品质、增强飞行的安全及减轻驾驶员负担。
78.信号控制模块是一种基于mcu最小电路单元作为控制器的低成本可扩展模块,mcu最小电路单元主要用于接收无人机的飞控系统发送的信号或者指令,并执行相关动作。信号控制模块内部还包括解锁使能单元、电源控制单元、信号输出单元。解锁使能单元是以双
路固态继电器为核心组成的逻辑控制单元;电源控制单元主要以光耦和mos管作为核心器件,用于打开或者关闭信号输出电源,也就是为信号输出单元输出控制信号进行供电;信号输出单元主要以光耦和mos管作为核心器件,在供电的情况下可以依据飞控系统的信号向被控设备输出脉冲信号或者构建反馈回路。
79.被控设备是指无人机本身搭载的设备或者其他扩展设备,在接收信号控制模块输出的信号之后,可以执行相应的动作。例如,某被控设备为降落伞设备,在接收到信号控制模块输出的打开降落伞的指令之后,执行打开降落伞的动作;某被控设备为物品投放设备,在接收到信号控制模块输出的投放物品的指令之后,执行投放物品的动作。
80.对于一些中小型的无人机来说,无法搭载体积较大且重量较重的火工品保护设备进行信号控制,并且火工品保护设备的成本或价格较高,也不利于无人机的成本控制。另外,若采用无人机本身直接输出的电平信号或者地/开信号作为控制信号,则容易受到干扰导致误触发。因此,采用本技术涉及的信号控制模块进行信号控制具有多种好处,第一,将信号控制模块作为扩展模块接入现有的无人机,无需对无人机的飞控系统进行更换;第二,信号控制模块是基于低成本的mcu最小电路作为控制核心,可以有效控制成本;第三;信号控制模块设有多重硬件开关,至少同时接收到使能信号与解锁信号,才能进一步输出控制信号,避免了对被控设备输出错误的控制信号,也即避免了误触发。
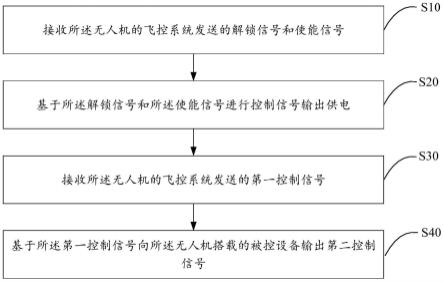
81.参照图2,本技术信号控制方法第一实施例提供一种流程示意图,所述信号控制方法应用于信号控制模块,所述信号控制模块作为扩展模块设置于无人机,所述信号控制方法包括:
82.步骤s10,接收所述无人机的飞控系统发送的解锁信号和使能信号。
83.具体地,信号控制模块与无人机建立物理连接,无人机可以通过飞控系统向控制模块发送串口的高低电平信号或者地/开信号,信号控制模块内的mcu最小电路具备信号转换功能,可以将无人机的飞控系统发送的控制信号转换为地/开信号。
84.在需要对无人机搭载的被控设备进行控制时,由无人机的飞控系统向信号控制模块发送解锁信号和使能信号,可以同时发送解锁信号和使能信号,也可以先后发送解锁信号和使能信号,但是解锁信号和使能信号必须有重叠的持续时间。相应地,信号控制模块通过解锁使能单元接收无人机的飞控系统发送的解锁信号和使能信号。
85.步骤s20,基于所述解锁信号和所述使能信号进行控制信号输出供电。
86.具体地,信号控制模块通过解锁使能单元接收无人机的飞控系统发送的解锁信号和使能信号之后,如果解锁信号和使能信号的持续时间有重叠,也即同时存在解锁信号和使能信号,那么可以进一步地通过解锁使能单元向电源控制单元发送输出供电信号。相应地,电源控制单元在接收到输出供电信号之后,会通过内部的电路将电池的供电电压进行转换,作为对信号输出单元的供电电压,进行控制信号输出供电。
87.如果缺少解锁信号和使能信号之间的任意一种信号,或者解锁信号和使能信号不是同时存在,那么就不满足控制信号输出供电的必要条件,解锁使能单元无法向电源控制单元发送输出供电信号,而信号输出单元也无法输出控制信号。
88.步骤s30,接收所述无人机的飞控系统发送的第一控制信号。
89.具体地,信号输出单元在得到供电电压之后,具备了输出控制信号的能力。进一步地,信号控制模块通过mcu最小电路单元接收无人机的飞控系统发送的第一控制信号,然后
mcu最小电路单元向信号输出单元发送第一控制信号。相应地,信号输出单元接收mcu最小电路单元发送的第一控制信号。
90.步骤s40,基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。
91.具体地,信号输出单元在接收第一控制信号之后,在电源控制单元的供电下将第一控制信号转换为第二控制信号,第二控制信号可以表现为正脉冲或者负脉冲的形式。对于一些安全性要求较高的被控设备,第二控制信号可以同时包括正脉冲或者负脉冲,对被控设备实现双信号控制;对于一些安全性要求不高的被控设备,第二控制信号可以只包括正脉冲。
92.然后,信号输出单元向无人机搭载的被控设备输出第二控制信号,相应地,被控设备接收第二控制信号并依据第二控制信号执行对应的动作。如此,无人机的飞控系统便通过信号控制模块实现了对被控设备的安全控制。
93.本实施例通过上述方案,具体通过接收所述无人机的飞控系统发送的解锁信号和使能信号;基于所述解锁信号和所述使能信号进行控制信号输出供电;接收所述无人机的飞控系统发送的第一控制信号;基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。本实施例中,信号控制模块在接收到无人机的飞控系统发送的解锁信号和使能信号,在解锁信号和使能信号的共同作用下对控制信号输出进行供电,然后接收并基于无人机的飞控系统发送的第一控制信号输出第二控制信号,以控制无人机搭载的被控设备。如果缺少了解锁信号和使能信号中的任意一种信号,将无法对被控设备输出控制信号,如此保证了对被控设备的安全控制,解决了无人机控制信号受干扰导致误触发,进而影响无人机飞行安全的问题。
94.进一步地,参照图3,本技术信号控制方法第二实施例提供一种流程示意图,基于上述图2所示的实施例,步骤s20,基于所述解锁信号和所述使能信号进行控制信号输出供电之前,还包括:
95.步骤s001,接收所述无人机的飞控系统发送的第一地/开信号;
96.为进一步保证信号控制模块输出控制信号的安全性,避免对被控设备输出错误的控制信号,也即避免误触发,本实施例在基于解锁信号和使能信号的双条件判断的基础上,增加第一地/开信号形成三条件判断。只有同时存在第一地/开信号、解锁信号和使能信号,才能进一步地通过解锁使能单元向电源控制单元发送输出供电信号。
97.具体地,无人机的飞控系统在向信号控制模块发送第一地/开信号,相应地,信号控制模块通过mcu最小电路单元接收无人机的飞控系统发送的第一地/开信号。
98.步骤s20,基于所述解锁信号和所述使能信号进行控制信号输出供电的步骤包括:
99.步骤s201,基于所述第一地/开信号、所述解锁信号和所述使能信号进行控制信号输出供电。
100.具体地,信号控制模块通过mcu最小电路单元接收无人机的飞控系统发送的第一地/开信号之后,mcu最小电路单元向电源控制单元发送第一地/开信号。此时,电源控制单元已同时接收到解锁使能单元发送的输出供电信号以及mcu最小电路单元的第一地/开信号,基于输出供电信号与第一地/开信号,通过内部的电路将电池的供电电压进行转换,作为对信号输出单元的供电电压,进行控制信号输出供电。
101.本实施例通过上述方案,具体通过接收所述无人机的飞控系统发送的第一地/开信号;基于所述第一地/开信号、所述解锁信号和所述使能信号进行控制信号输出供电。本实施例中,信号控制模块接收无人机的飞控系统发送的第一地/开信号,在基于解锁信号和使能信号的双条件判断的基础上,增加第一地/开信号形成三条件判断,有效避免对被控设备输出错误的控制信号,能够进一步提高信号控制的可靠性。
102.进一步地,参照图4,本技术信号控制方法第三实施例提供一种流程示意图,基于上述图2所示的实施例,步骤s20,基于所述解锁信号和所述使能信号进行控制信号输出供电之前,还包括:
103.步骤s002,设置控制信号输出窗口时间;
104.本实施例涉及的被控设备可以是降落伞设备或者是物品投放设备等涉及飞行安全的设备,这些设备执行动作的时间比较短,并不需要持续获取控制信号。为此,本实施例将信号控制模块输出第二控制信号的时间限定在一定范围内,超出该范围将无法输出第二控制信号。
105.具体地,通过软件算法或者硬件设计形成一个定时器,该定时器用于设置控制信号输出窗口时间,控制信号输出窗口时间是一个具体的时间范围,该时间范围可以容纳第二控制信号的输出耗时。例如,第二控制信号的输出耗时为10ms,设置的控制信号输出窗口时间为100ms,在该窗口时间内足够完成第二控制信号的输出动作。
106.步骤s20,基于所述解锁信号和所述使能信号进行控制信号输出供电的步骤包括:
107.步骤s202,基于所述控制信号输出窗口时间、所述解锁信号和所述使能信号进行控制信号输出供电。
108.具体地,电源控制单元在接收到输出供电信号之后,会通过内部的电路将电池的供电电压进行转换,作为对信号输出单元的供电电压,进行控制信号输出供电。在电源控制单元开始供电的同时,起算控制信号输出窗口时间,在该窗口时间内信号控制模块得到足够的电压输出第二控制信号,如果超出窗口时间,信号控制模块无法得到足够的电压输出第二控制信号,即停止信号输出。例如,在电源控制单元开始供电后的100ms内,信号控制模块可以向被控设备输出第二控制信号,如果超出了100ms,信号控制模块停止输出第二控制信号。
109.本实施例通过上述方案,具体通过设置控制信号输出窗口时间;基于所述控制信号输出窗口时间、所述解锁信号和所述使能信号进行控制信号输出供电。本实施例考虑到控制信号发送并不需要太长的时间,设置了对应的控制信号输出窗口时间,信号控制模块在该窗口时间内才能向被控设备输出控制信号,而超出了该窗口时间就失去了控制信号输出能力,进一步增加了控制信号输出的限制条件,提高控制信号的可靠性。
110.进一步地,参照图5,本技术信号控制方法第四实施例提供一种流程示意图,基于上述图2所示的实施例,步骤s40,基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号之后,还包括:
111.步骤s003,基于所述第二控制信号向所述无人机的飞控系统反馈控制信号输出结果。
112.信号输出模块作为一种扩展模块,其信号输出结果需要及时反馈给无人机的飞控系统,以使飞控系统得知控制信号是否输出成功。具体地,信号控制模块预先设置了信号反
馈回路,信号输出单元向被控设备输出第二控制信号的同时,信号输出单元通过信号反馈回路将第二控制信号的输出情况反馈至mcu最小电路单元,然后,mcu最小电路单元将第二控制信号的输出情况反馈至无人机的飞控系统。如此,无人机的飞控系统便可及时得知控制信号是否输出成功。如果无人机的飞控系统接收的反馈结果表明第二控制信号输出失败,或者无法接收的反馈结果,此时有可能是解锁使能单元没有成功启用,需要检查并重新发送解锁信号和使能信号。
113.本实施例通过上述方案,具体通过基于所述第二控制信号向所述无人机的飞控系统反馈控制信号输出结果。本实施例考虑到信号控制模块作为无人机的扩展模块,无人机的飞控系统难以及时获知控制信号是否发送成功,为此,在输出第二控制信号之后,基于预先构建的反馈回路与第二控制信号向无人机的飞控系统反馈控制信号输出结果,使得无人机的飞控系统可以进一步依据控制信号输出结果执行重新输出或者其他动作,提高了控制信号输出过程的鲁棒性。
114.进一步地,参照图6,本技术信号控制方法第五实施例提供一种流程示意图,基于上述图2所示的实施例,步骤s40,基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号的步骤包括:
115.步骤s401,将所述第一控制信号转换为第二地/开信号。
116.接收第一控制信号的主体为信号控制模块的mcu最小电路单元,一般来说,mcu最小电路单元支持gpio端口输出高低电平信号。但是对于飞行控制来说,地/开信号是更为通用且可靠的信号形式,为此,本实施例涉及的mcu最小电路单元支持将第一控制信号转换为地/开信号的功能。具体地,无人机的飞控发送的第一控制信号有可能是串口的高低电平信号或者是地/开信号,mcu最小电路单元在接收到第一控制信号之后,将第一控制信号转换为第二地/开信号。
117.步骤s402,基于所述第二地/开信号向所述无人机搭载的被控设备输出所述第二控制信号。
118.具体地,mcu最小电路单元将第一控制信号转换为第二地/开信号之后,向信号输出单元发送第二地/开信号。相应地,信号输出单元接收来自mcu最小电路单元的第二地/开信号,在电源控制单元的供电下将第二地/开信号转换为第二控制信号,第二控制信号可以表现为正脉冲或者负脉冲的形式。对于一些安全性要求较高的被控设备,第二控制信号可以同时包括正脉冲或者负脉冲,对被控设备实现双信号控制;对于一些安全性要求不高的被控设备,第二控制信号可以只包括正脉冲。
119.然后,信号输出单元向无人机搭载的被控设备输出第二控制信号,相应地,被控设备接收第二控制信号并依据第二控制信号执行对应的动作。如此,无人机的飞控系统便通过信号控制模块实现了对被控设备的安全控制。
120.本实施例通过上述方案,具体通过将所述第一控制信号转换为第二地/开信号;基于所述第二地/开信号向所述无人机搭载的被控设备输出所述第二控制信号。本实施例中,对mcu最小电路单元作适应性改进,mcu最小电路单元通过gpio端口输出高低电平信号转换为第二地/开信号,进而基于第二地/开信号向无人机搭载的被控设备输出第二控制信号。其中,gpio端口输出高低电平信号转换为地/开信号的形式,可以提高控制信号传输的可靠性,并且更好地适应飞行控制的需求。
121.参照图7,本技术信号控制方法第二实施例提供一种流程示意图,所述信号控制方法应用于无人机,所述无人机设置信号控制模块作为扩展模块,所述信号控制方法包括:
122.步骤a10,通过所述无人机的飞控系统向所述信号控制模块发送解锁信号和使能信号,以供所述信号控制模块基于所述解锁信号和所述使能信号进行控制信号输出供电。
123.具体地,信号控制模块与无人机建立物理连接,无人机可以通过飞控系统向控制模块发送串口的高低电平信号或者地/开信号,信号控制模块内的mcu最小电路具备信号转换功能,可以将无人机的飞控系统发送的控制信号转换为地/开信号。
124.在需要对无人机搭载的被控设备进行控制时,由无人机的飞控系统向信号控制模块发送解锁信号和使能信号,可以同时发送解锁信号和使能信号,也可以先后发送解锁信号和使能信号,但是解锁信号和使能信号必须有重叠的持续时间。相应地,信号控制模块通过解锁使能单元接收无人机的飞控系统发送的解锁信号和使能信号。
125.信号控制模块通过解锁使能单元接收无人机的飞控系统发送的解锁信号和使能信号之后,如果解锁信号和使能信号的持续时间有重叠,也即同时存在解锁信号和使能信号,那么可以进一步地通过解锁使能单元向电源控制单元发送输出供电信号。相应地,电源控制单元在接收到输出供电信号之后,会通过内部的电路将电池的供电电压进行转换,作为对信号输出单元的供电电压,进行控制信号输出供电。
126.如果缺少解锁信号和使能信号之间的任意一种信号,或者解锁信号和使能信号不是同时存在,那么就不满足控制信号输出供电的必要条件,解锁使能单元无法向电源控制单元发送输出供电信号,而信号输出单元也无法输出控制信号。
127.步骤a20,通过所述无人机的飞控系统向所述信号控制模块发送第一控制信号,以供所述信号控制模块基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。
128.具体地,信号输出单元在得到供电电压之后,具备了输出控制信号的能力。进一步地,无人机的飞控系统向信号控制模块发送第一控制信号,信号控制模块通过mcu最小电路单元接收第一控制信号,然后mcu最小电路单元向信号输出单元发送第一控制信号。相应地,信号输出单元接收mcu最小电路单元发送的第一控制信号,在电源控制单元的供电下将第一控制信号转换为第二控制信号,第二控制信号可以表现为正脉冲或者负脉冲的形式。对于一些安全性要求较高的被控设备,第二控制信号可以同时包括正脉冲或者负脉冲,对被控设备实现双信号控制;对于一些安全性要求不高的被控设备,第二控制信号可以只包括正脉冲。
129.然后,信号输出单元向无人机搭载的被控设备输出第二控制信号,相应地,被控设备接收第二控制信号并依据第二控制信号执行对应的动作。如此,无人机的飞控系统便通过信号控制模块实现了对被控设备的安全控制。
130.本实施例通过上述方案,具体通过所述无人机的飞控系统向所述信号控制模块发送解锁信号和使能信号,以供所述信号控制模块基于所述解锁信号和所述使能信号进行控制信号输出供电;通过所述无人机的飞控系统向所述信号控制模块发送第一控制信号,以供所述信号控制模块基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。本实施例中,无人机的飞控系统向信号控制模块发送解锁信号和使能信号,信号控制模块在解锁信号和使能信号的共同作用下对控制信号输出进行供电。然后,无人机的飞控
系统向信号控制模块发送第一控制信号,使信号控制模块进一步输出第二控制信号,以控制无人机搭载的被控设备。如果缺少了解锁信号和使能信号中的任意一种信号,将无法对被控设备输出控制信号,如此保证了对被控设备的安全控制,解决了无人机控制信号受干扰导致误触发,进而影响无人机飞行安全的问题。
131.参照图8,本技术信号控制模块实施例提供一种模块示意图。信号控制模块包括mcu最小电路单元、解锁使能单元、电源控制单元、信号输出单元。
132.mcu最小电路单元:主要用于接收无人机的飞控系统发送的信号或者指令,并执行相关动作。
133.解锁使能单元:以双路固态继电器为核心组成的逻辑控制单元。
134.电源控制单元:以光耦和mos管作为核心器件,用于打开或者关闭信号输出电源,也就是为信号输出单元输出控制信号进行供电。
135.信号输出单元:以光耦和mos管作为核心器件,在供电的情况下可以依据飞控系统的信号向被控设备输出脉冲信号或者构建反馈回路。
136.如图9所示,图9为信号控制模块在无人机系统中的连接关系的第一示意图。无人机的飞控系统(飞控计算机)与信号控制模块建立通信连接,可以交互串口的高低电平信号或者地/开信号。而信号控制模块与无人机的被控设备(安全/任务相关设备)建立通信连接,信号控制模块可以向被控设备发送控制信号。
137.更为具体地,如图10所示,图10为信号控制模块在无人机系统中的连接关系的第二示意图。无人机的飞控系统向信号控制模块发送解锁信号和使能信号,信号控制模块通过解锁使能电路(解锁使能单元)接收解锁信号和使能信号。如图11所示,图11为解锁使能单元与电源控制单元的电路示意图,其中,光耦器件u3的输入端在解锁信号ctr_lock和使能信号ctr_en的作用下产生电流,输出端导通。mcu最小电路单元向电源控制电路发送地/开信号od_out1,光耦器件u1的输入端在地/开信号od_out1与vcc_a的作用下产生电流,此时mos管q1打开,电流从vcc_a流经继电器rl1,继电器的端子3与端子4相接,电池电源vcc_bat转换为信号输出的供电电源vcc_pow_on。进一步地,如图12所示,图12为信号输出单元的电路示意图,其中,无人机的飞控系统发送的控制信号被信号控制模块的mcu最小控制单元接收,mcu最小控制单元将该控制信号转换为地/开信号od_out2和地/开信号od_out3。地/开信号od_out2与vcc_a控制光耦器件u2的输入端是否导通,进而控制mos管q2是否打开,决定是否在供电电源vcc_pow_on的作用下输出正脉冲kz_out1,同时正脉冲kz_out1可另接导线构建反馈回路至mcu最小电路单元,mcu最小电路单元向飞控系统反馈控制信号输出情况。地/开信号od_out3与vcc_a控制光耦器件u4的输入端是否导通,进而控制mos管q3是否打开,决定是否在电池地线gnd_bat的作用下输出负脉冲gnd_out(此处负脉冲是相对于基准电压而言,并非仅指电压为负的脉冲)。如此,被控设备可以接收到信号控制模块输出的正脉冲kz_out1与负脉冲gnd_out,进而执行相应的动作。
138.本实施例中,信号控制模块在接收到无人机的飞控系统发送的解锁信号和使能信号,在解锁信号和使能信号的共同作用下对控制信号输出进行供电,然后接收并基于无人机的飞控系统发送的控制信号输出正脉冲和负脉冲,以控制无人机搭载的被控设备。如果缺少了解锁信号和使能信号中的任意一种信号,将无法对被控设备输出正脉冲和负脉冲,如此保证了对被控设备的安全控制,解决了无人机控制信号受干扰导致误触发,进而影响
无人机飞行安全的问题。并且,本实施例描述了信号控制模块各功能单元的电路工作原理,信号控制模块基于低成本的mcu最小电路单元作为控制核心,且其他各功能单元的电路设计逻辑清晰,所采用的电子元件技术成熟且价格较低。因此,信号控制模块具有低成本的特点,且信号控制模块电路设计简单,可以被制作成体积较小的扩展模块,易搭载于中小型无人机,提供安全、可靠的信号控制。
139.此外,本技术实施例还提出一种信号控制装置,所述信号控制装置包括:
140.第一接收模块,用于接收无人机的飞控系统发送的解锁信号和使能信号;
141.供电模块,用于基于所述解锁信号和所述使能信号进行控制信号输出供电;
142.第二接收模块,用于接收所述无人机的飞控系统发送的第一控制信号;
143.输出模块,用于基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。
144.本实施例实现信号控制的原理及实施过程,请参照上述各实施例,在此不再赘述。
145.此外,本技术实施例还提出一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的信号控制程序,所述信号控制程序被所述处理器执行时实现如上所述的信号控制方法的步骤。
146.由于本信号控制程序被处理器执行时,采用了前述所有实施例的全部技术方案,因此至少具有前述所有实施例的全部技术方案所带来的所有有益效果,在此不再一一赘述。
147.此外,本技术实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有信号控制程序,所述信号控制程序被处理器执行时实现如上所述的信号控制方法的步骤。
148.由于本信号控制程序被处理器执行时,采用了前述所有实施例的全部技术方案,因此至少具有前述所有实施例的全部技术方案所带来的所有有益效果,在此不再一一赘述。
149.相比现有技术,本技术实施例提出的信号控制方法、模块、装置、终端设备及存储介质,通过接收所述无人机的飞控系统发送的解锁信号和使能信号;基于所述解锁信号和所述使能信号进行控制信号输出供电;接收所述无人机的飞控系统发送的第一控制信号;基于所述第一控制信号向所述无人机搭载的被控设备输出第二控制信号。基于本技术方案,信号控制模块在接收到无人机的飞控系统发送的解锁信号和使能信号,在解锁信号和使能信号的共同作用下对控制信号输出进行供电,然后接收并基于无人机的飞控系统发送的第一控制信号输出第二控制信号,以控制无人机搭载的被控设备。如果缺少了解锁信号和使能信号中的任意一种信号,将无法对被控设备输出控制信号,如此保证了对被控设备的安全控制,解决了无人机控制信号受干扰导致误触发,进而影响无人机飞行安全的问题。
150.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
151.上述本技术实施例序号仅仅为了描述,不代表实施例的优劣。
152.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在如上的一个存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,被控终端,或者网络设备等)执行本技术每个实施例的方法。
153.以上仅为本技术的优选实施例,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1